基于改进Canny算法的铁轨边缘检测
2015-01-01王燕芩李沛奇
王燕芩 李沛奇
当列车运行速度达到200km/h时,即使很小的异物侵入到线路,都会导致非常严重的行车事故。目前我国对异物侵入的监测方式主要是视频监测,即在事故易发地段设置摄像机,通过对采集的视频实时分析处理,判断是否发生异物侵限。这种视频监测需要人工观测处理,耗费大量人力,为此提出利用Canny边缘检测算法检测异物侵限,不仅提高了整个监测过程的自动化程度,也提高了整个系统的可靠性。
Canny定义了边缘检测的3条准则:信噪比准则、定位精度准则和单边缘响应准则。提出最佳边缘检测算子,即Canny边缘检测算子。Canny算子具有良好的检测效果,成为评价边缘检测方法的标准。在异物侵限监测现场,光照度和天气等因素都会影响到图片拍摄的质量,导致图像出现噪声,使检测出的轨道边缘出现模糊。因此需根据现场的监测环境,结合Canny算法的特点对传统Canny算法进行改进,使改进后的算法更符合实际应用。
1 传统Canny边缘检测算法
1.1 算法流程
1.平滑图像。对要处理的图像用高斯滤波器做卷积运算,从而可以在计算梯度时,减小噪声对图像的影响。高斯滤波器的公式:

其中,σ为高斯滤波器参数。
2.计算梯度幅值分量。在水平和垂直两方向,用一阶差分算子计算梯度幅值M,以及梯度方向θ,计算公式:

3.非极大值抑制。对梯度幅值图像M [i,j]上的像素逐一进行检测,把当前像素的梯度幅值与其梯度方向上2个相邻像素的梯度幅值进行比较,如果当前像素的梯度幅值不小于这2个值,则该像素可能是边缘点;如果梯度幅值小于这2个值,则该像素点是非边缘点。通过对图像M [i,j]非极大值抑制,获得图像NMS[i,j]。
4.双阈值检测和边缘连接。传统检测方法分别用高、低阈值Th和Tl来提取图像的边缘。对图像NMS[i,j],用Th和Tl分别进行阈值化得到边缘图像E1和E2。E1和E2分别为强、弱边缘点,其中,E1可能会出现边缘间断的情况,需进行边缘连接。追踪图像E1的边缘,当边缘到端点时,就在E2中搜索边缘点来连接E1中的间断,直到将E1边缘的间断全部连接起来为止。
1.2 异物监测中的缺陷
1.高斯滤波器对噪声严重的图像抑制效果不理想,容易误检出假边缘,也会将真实边缘的一些细节丢失,从而使检测结果的信噪比变小。在监测现场,由于环境因素的影响,会有大量的噪声出现,如果不对这些噪声做有效地处理,必定会影响到检测的精度,从而降低整个监测系统的可靠性。
对大多数老年人来说,在所有关节中,髋关节和膝关节是最易受伤的部位。坚持练习一套保髋操,不但能起到舒筋活血的作用,还能保养关节。
2.边缘连接过于简单,不会考虑到铁轨具有连续的边缘走向,检测出的边缘会显得粗糙、不光滑,也会存在间断,从而影响监测精度。
传统的边缘检测方法虽然计算简单,但是存在诸多问题,最主要的是无法保证检测的精度和可靠性,因此需对传统算法进行改进。
2 改进Canny算法
2.1 改进的开关型中值滤波器
2.1.1 中值滤波原理
近年来,基于噪声检测的中值滤波器在图像处理方面表现效果良好,得到了广泛的应用,其算法如下。
设xi表示像素强度,则{x1,x2,…xN}是由滤波窗口构成的输入序列集。把y记为滤波器输出。首先对输入序列进行升序排列,即x(1)<x(2)< … <x(N),得到新的序列集{x(1),x(2),…x(N)},则有:

中值滤波是基于范数L1的最佳估值,即符合以下条件:

中值滤波器的脉冲噪声抑制和细节特征保护能力比线性滤波器强,但在除噪的同时不可避免的破坏了图像的细节部分,处理噪声严重的图像效果不是很理想,所以需进一步改进。
采用分段统计的方式,首先对于一个像素点P,确定以P点为中心点的 (2N+1)×(2N+1)领域;这里把领域称为窗口,按照灰度等级把窗口中的像素排序,然后把排序后的像素值平均分成N+2段,每段含N+2个像素,并把中间段的N+2个像素值的平均值作为P点像素灰度的新值。领域图像中间一段N+2个像素灰度值的平均值,决定了改进算法的输出像素。由于窗口内数据点间具有相关性,因此孤立的噪声点可以进一步消除,被破坏的数据也可以得到很好的恢复。在图像中移动窗口,直到处理完所有像素。实验表明,改进的中值滤波算法在图像的细节保护方面表现更好,提高了现场监测的精度。
2.1.3 开关滤波原理
开关滤波处理的算法,将全部像素分为保持原值不变的信号S和需要进行处理的噪声N,算法原理如图1所示。
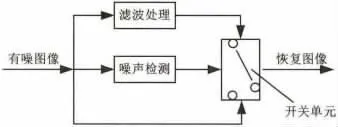
图1 开关滤波结构
噪声检测器可以对噪声进行判定,从而控制开关单元。噪声检测器如果判定该像素点不是噪声点,则把该点直接输出,不作任何处理;如果判定该像素点是噪声点,则把开关和滤波处理单元连接起来,对该点进行滤波处理。
2.1.4 基于改进中值滤波算法的开关去噪
对所有的像素点都采取统一的方法处理是传统中值滤波器的一大弊端,会造成图像模糊并降低检测的精度。把开关用到滤波处理中,可以有效区分信号点和噪声点,最大程度上提高检测效率和检测精度。该算法对图像的细节保护能力也非常强,尤其对冲击噪声有很好的检测效果,非常适合Canny边缘检测。
去噪算法步骤:①把 (3×3)滤波窗口在图像中移动,并把滤波窗口的中心位置与图像中某一像素点P0的位置重合;②读取此时像素点P0对应的灰度值;③利用max-min算子,对像素点P0进行噪声检测;④若P0点对应的灰度值不是局部极值,则判定该点不是噪声点,把该点原值输出;⑤若P0点对应的灰度值是局部极值,则判定该点是噪声点,此时利用改进的中值滤波算法对该点进行处理;⑥用以上步骤处理其他像素,直到全部处理完毕。
2.2 利用惯性原理进行边缘跟踪
在如图2所示的3×3窗口中,边缘方向总共有8种情况。图中箭头指向阴影方块代表的像素点,表示之前检测到的边缘方向。在追踪边缘时,首先检测箭头指向阴影方块代表的像素点;然后再检测旁边2个阴影方块代表的像素点,体现惯性原理;由于铁轨具有连续的边缘走向,所以不用检测空白方块代表的像素点,空白方块表示边缘中的尖锐角点。
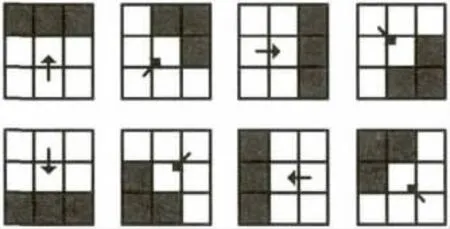
图2 3×3窗口中边缘的方向情况
经过非极大值抑制过的图像,其梯度直方图存在边缘像素梯度分布,边缘像素梯度分布在距离最值梯度相对较远的位置,因此,像素最值梯度方差很大。依据梯度分布,设定高阈值Th和低阈值Tl:
Th=Hmax+(1+β)×σmax,
Tl=Hmax+(1-β)×σmax,
其中,β为阈值调整因子,0<β<1;Hmax为像素最值梯度 (Hmax一般是非边缘点的梯度值);σmax为像素最值梯度方差 (是图像内全部像素的梯度相对于Hmax的方差)。
由上述表达式可以看出,Th必然在非边缘区域以外,从而避免伪边缘的产生;而Tl应该在若边缘附近,从而有效地修补高阈值的边缘;根据惯性原理,设定图像的边缘跟踪过程步骤如下:
步骤1,在非极大值抑制图像中,找到一个梯度值大于Th的像素点,若在该像素点的3×3窗口中的8个相邻点中存在一个点的梯度值大于低域值,以该像素点为起始点,用步骤2开始跟踪;如果没有这样的像素点,则在图像中找一个梯度值不小于Th的像素点,则以该像素点为起始点用步骤2开始跟踪;如果这样的像素点也没有,则结束跟踪。
步骤2.在该像素点的3×3窗口中找1个梯度值最大的像素点,如果新的像素点的梯度值不大于Tl,则跳回步骤1;如果新的像素点梯度值大于Tl,则将该像素点转到边缘图像,根据之前的像素点和新的像素点标记边缘方向,到步骤3。
步骤3,基于惯性原理,规定追踪边缘的次序如下:①如果箭头指向的像素点梯度值大于Tl,则该点即为追踪目标,并将该点转到边缘图像中,保持边缘的方向不变,重复步骤3;②如果箭头指向的像素点旁边2个点中,梯度值较大的那个像素点的梯度值大于Tl,则该点就是跟踪目标,将该点转到边缘图像中,再修正边缘的方向,重复步骤3,直到把全部像素追踪完毕。
3 实验结果及分析
用传统Canny算法和改进算法分别处理图像,如图3,图4所示,其中图3(a)为无干扰的铁轨图,图4(a)为加了25%噪声铁轨图。比较图3(b)和图3(c)可以看出,改进的算法不仅保持了传统Canny算法的优点,而且还比传统Canny算法检测细节边缘的能力强,检测出的边缘更加光滑、细腻。比较图4(b)和图4(c)可以看出,改进算法比传统Canny算法有更好的噪声抑制能力,加入的噪声对改进算法影响非常小。
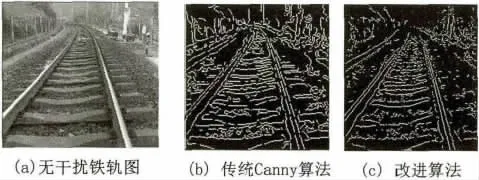
图3 无干扰时铁轨边缘检测图
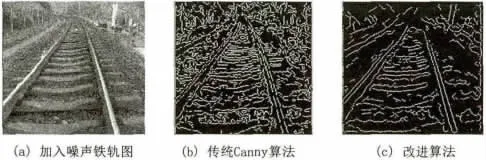
图4 有干扰时铁轨边缘检测图
轨道图的边缘检测是轨道异物检测的核心,只有准确检测出线路的双轨,才能确定障碍物监测的区域。经过多次试验,得到试验结果:用改进算法检测出的边缘和传统Canny算法相比,具有更好的连续性和细节边缘表现力,而且噪声抑制能力也远优于传统算法,更为重要的是在现场监测中表现出了较强的可靠性,提高了整个监测系统的自动化程度。
[1] 王彤,史宏,王前,等.客运专线异物侵限监控系统技术的研究[J].铁路计算机应用,2009,18(7):8-10.
[2] Canny J.A computational approach to edge detection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1986,8(6):679-698.
[3] 王植,贺赛先.一种基于Canny理论的自适应边缘检测方法[J].中国图象图形学报,2004,9(8):957-962.
[4] 王小俊,刘旭敏,关永.基于改进Canny算子的图像边缘检测算法[J].计算机工程,2012,38(14):196-202
[5] 徐国宝,尹怡欣,周美娟,等.基于中值和多尺度的组合优化滤波器[J].计算机应用,2012,32(6):1557-1559,1573.
[6] Sun T,Neuvo Y.Detail-preserving median based filters in image processing[J].Pattern Recognition Letters,1994,15(4):341-347.
