三次元送料机构干涉曲线设计与研究
2014-12-19杨亚威李梦群宁学涛
黄 伟,杨亚威,李梦群,宁学涛
HUANG Wei1,2,YANG Ya-wei1,LI Meng-qun2,NING Xue-tao1,2
(1.中国科学院宁波材料技术与工程研究所 先进制造技术研究所,宁波 315201;2.中北大学 机械与动力工程学院,太原 030051)
0 引言
在现代化工业领域中,随着制造业的快速发展,工业自动化程度的不断提高,用机器取代人工已经成为趋势[1]。自动送料装置在很大程度上满足了企业在生产上的要求。相比人工,自动送料效率高,成本低,安全可靠性强。多工位送料机构已经逐渐替代了传统的手工送料和单工位送料机构来提高生产效率[2]。然而不同的应用环境要求采用不同的多工位送料机构,这势必会增加送料机构的设计难度,也使得送料机构的运动轨迹设计更具要求。在进行送料机构设计中,存在一个不可避免的问题即冲压滑块与送料机械手在相对运动过程的干涉问题,发生干涉会造成冲压滑块与送料机械手发生碰撞,造成机械结构的损坏,所以对送料机构进行无干涉设计以及通过绘制干涉曲线对机构设计和运动轨迹的合理性进行检查是十分必要的,罗云华等人对行星式送料机构的干涉曲线设计进行了研究,但其方法缺乏通用性,针对这一情况,本文提出一种可应用到多种冲压送料机构的运动学分析法,并以参数化的形式对可实现联动的三次元送料机械手进行整个无干涉设计和轨迹规划。
1 干涉曲线原理
干涉曲线主要是冲压滑块在上下冲压过程中与送料机械手夹持器运动过程中的相对运动关系的图标和曲线及下模与机械手夹持器的运动关系,是一个三维的空间曲线[3],如图1所示。干涉曲线是一种相对运动轨迹,是为了检验模具在冲压过程中与送料机构运动过程中不发生干涉情况的一项指标。在机械结构的设计过程中需要确定的参数包含移送行程、夹取行程、举升行程、送料杆内宽,每分钟达到的次数最大搬送重量(制品+夹爪)等[4~6]。以冲压滑块的工作位置为基准,画出送料机械手夹持器的平面干涉曲线图来直观的观察是否发生干涉。通常判断是否产生干涉的原则是设置其间隙量为30mm,在需要进行干涉检测的运动过程中其相对运动间隙小于30mm被认定为干涉,否则被认为不干涉。当间隙小于30mm时需要对机械结构或是运动轨迹作出进一步修改,以达到无干涉的要求。
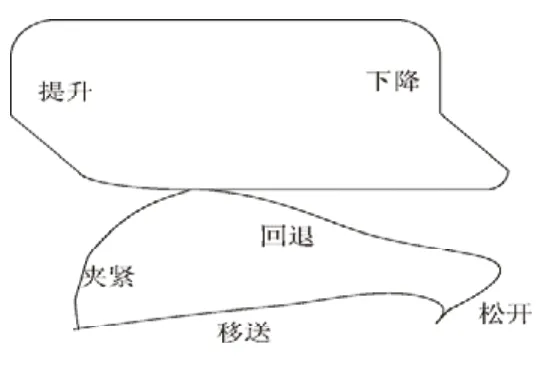
图1 空间干涉曲线
2 三次元送料周期图规划
本文以自主研发设计的三次元送料机械手为研究对象,三次元冲压送料机械手的主要设计参数如表1所示,送料机械手机构需进行干涉曲线检查机械运动简图如图2所示。

表1 送料机械手运动参数表

图2 机械运动示意图
三次元送料周期是以滑块的运动周期为基准对机械手夹持器的相对位置以0o~360o的圆周期表示,根据每分钟冲压次数为35次的要求,计算出滑块运动周期约为1.7s。为了保证工件能够从一工位到下一工位过程中不被冲压,需要保证冲压滑块与送料机械手夹持器在提降、送退、夹张的运动过程中相互配合,协同工作。
本文研发的三次元送料机械手将采用联动的形式,即提升与送料和松开与回退的过程联合运动,可提高效率。三次元送料周期可直观的表示机构工作过程中的提降、移退、夹张的时间分配以及整个运动过程中机械机构运动的轨迹设计发生联动的时间,整个运动过程中联动发生在提降与移送以及夹张与回退的过程[7]。根据实际生产的需要可以调控联动的时间以改善运动轨迹,在设计过程中值得注意的是在夹手夹紧以后和夹手松开以前要停留一段时间以保证工件能够稳定的放到下模,一般时间为0.02s(转换成周期的角度变化为50左右。根据冲压滑块与送料机械手夹持器在提降、送退、夹张的运动过程中相互配合,协同工作进行时间上的规划,可绘制如图3所示的三次元送料周期图,更直观的表示冲压滑块与送料机械手各个过程的时间分配关系。
3 干涉曲线的参数化无干涉设计与检查
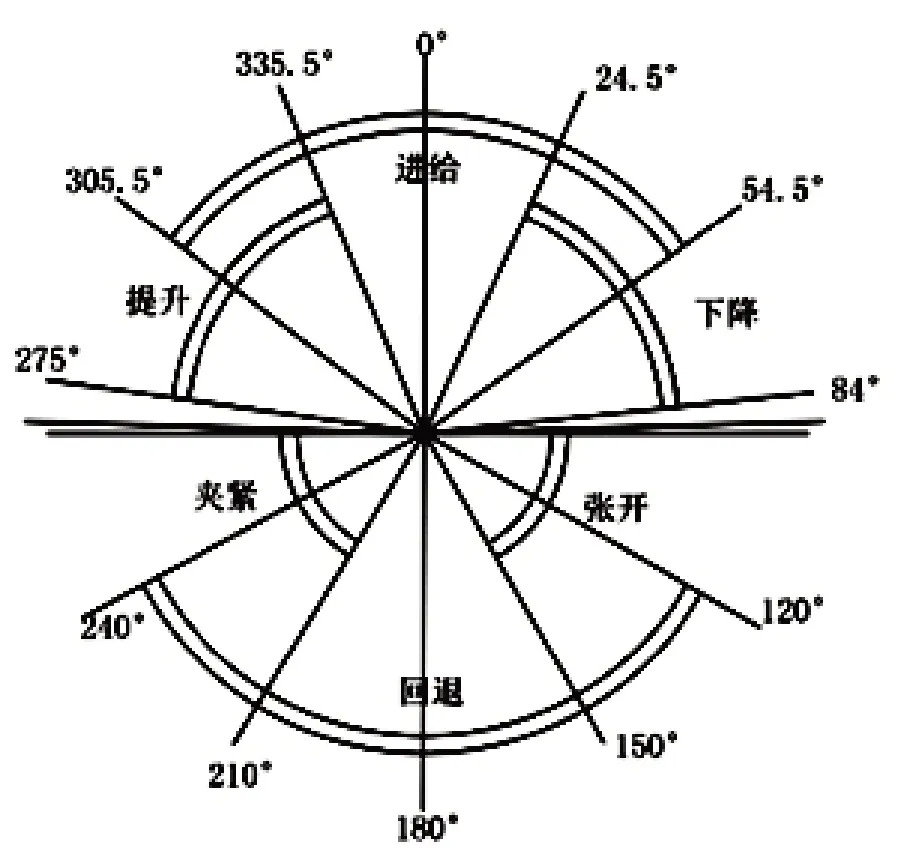
图3 三次元送料周期图
传统的无干涉设计方法只能针对一种冲压送料机构进行无干涉设计,本文提出了一种可以满足不同种类的冲压送料机构的运动学分析法通过参数化的方式进行无干涉设计及优化。通过B样条曲线对三次元送料机械手的机械机构进行运动学分析,以参数化方式进行送料机构的轨迹规划和无干涉设计。
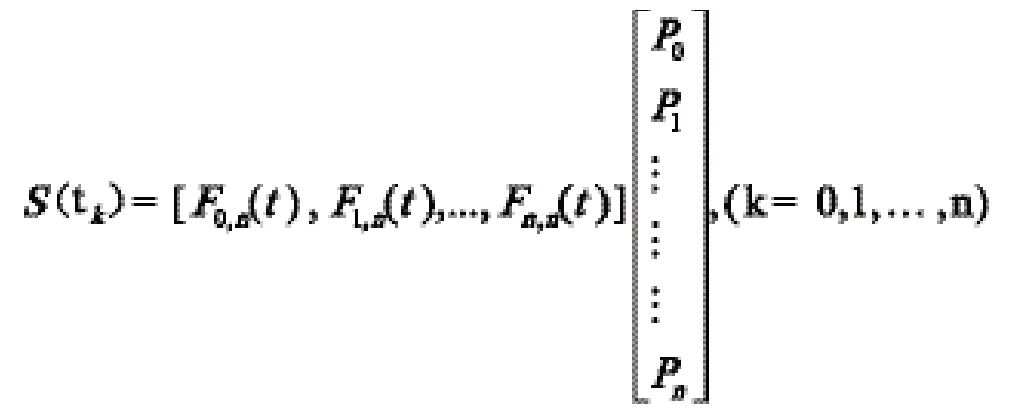
B样条曲线是一种灵活的曲线,曲线的局部形状受相应顶点的控制很直观[8]。通过对顶点控制技术,可以使整个B样条曲线在某些部位满足一些特殊的技术要求。B样条曲线表达式为:

在上式中i=0,1,2,…,m,Pi+k为控制顶点,Fk,n(t)为B样条基函数,可以看出:B样条曲线是分段定义的。如果给定m+n+1个顶点Pi(i=0,1,2,…,m+n),则可定义m+1段n次的参数曲线。
在以上表达式中:Fk,n(t)的n次B样条基函数,也称B样条分段混合函数。其表达式为:

式中k=0,1,2,…,n连接全部曲线段所组成的整条曲线称为n次B样条曲线。
依次用线段连接点 Pi+k(k=0,1,…,n)所组成的B样条曲线在tk时刻每个点是S(tk)表示为:
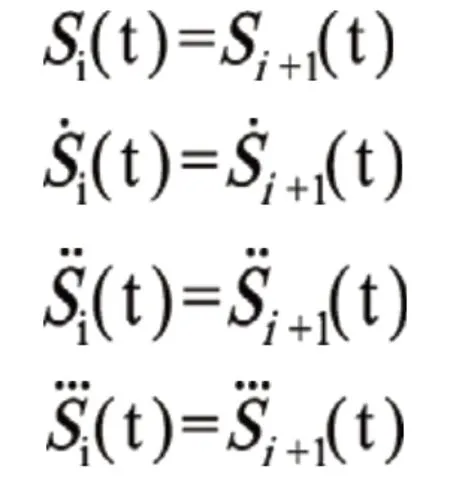
为了避免三次样条函数曲线过渡不平滑[9],本文采用五次B-spline样条曲线对X-Y-Z三轴的轨迹进行规划。

根据轨迹规划每两段相邻曲线在连接点处位置、速度、加速度、加加速度连续得出以下关系:
参数化设计是指零件和部件形状比较定型,用一组参数约束该几何形状的一组结构尺寸序列,参数与设计对象的控制尺寸有显示对应,当赋予不同参数时,就可以驱动原几何图形达到新的目标几何图形[10]。设计人员根据工程关系和几何关系来指定设计要求。每次改变这些设计参数时来维护尺寸或工程参数的初值这些基本关系[11]。本文对三次元送料机械手进行运动学分析,运用python软件进行编程,把运动学方程以语言的方式写入程序通过更改送料全过程的时间分配或周期运动参数,来调节送料机构与冲压滑块周期曲线来进行机构的参数化设计,达到无干涉设计的目的。通过参数化设计可以大大提高模型的生成和修改的速度,在产品的系列设计方面提高了工作效率和工作质量,具有较大的应用价值。
3.1 机械手送退夹张提降周期曲线
根据冲压滑块与机械手的相对运动关系和三向周期表可知,当冲压滑块开始运动时,移送已经进行了半个移送的行程,把冲压上死点时刻设为整个周期运动的起始时刻0时刻。根据移送和回退行程以及冲压的周期为1.7s,分别规划送退、夹张、升降的运动点,再通过B样条曲线进行五次插值。X、Y、Z在周期内对应的运动坐标如表2 所示
在满足冲压滑块与机械手送料、夹张、升降在同一时间内协同工作的条件下,采用Python编程软件,根据五次基样条曲线进行插值运算,通过反复调节时间参数最后可得到合理的三向送料机械手与冲压滑块的运动周期曲线如图4所示,图4直观反映了冲压滑块运动一周期与进退、夹张、升降运动曲线的相对关系。
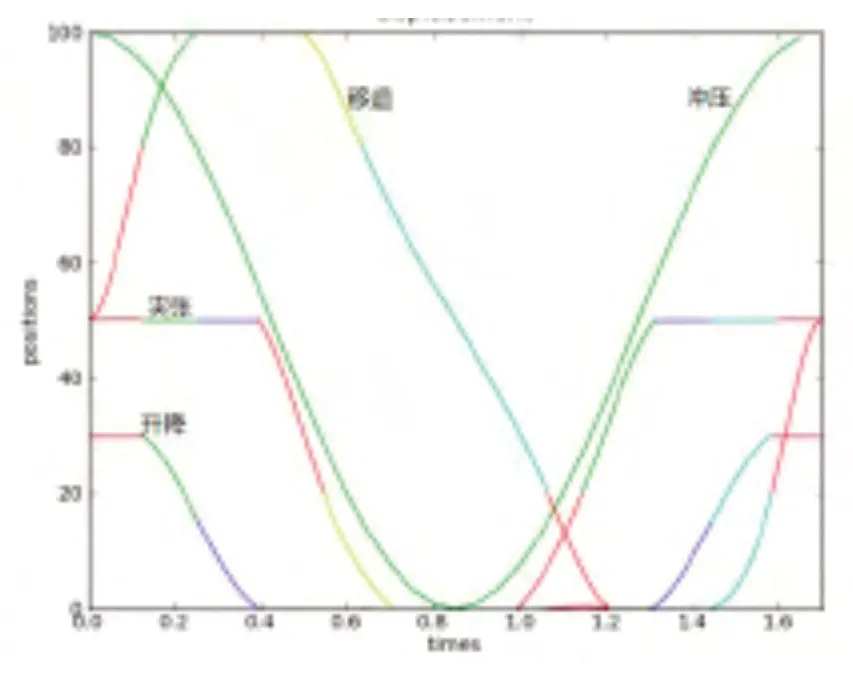
图4 三向送料周期曲线
3.2 干涉曲线
研究机械手送料过程中的干涉问题主要考虑冲压滑块和送料机械手夹持器干涉、下模同夹持器及产品的干涉。冲压滑块同夹持器关系表现在解除夹紧、送料、退料的过程。下模同机械手上夹持器干涉主要表现在送料过程。
3.2.1 下模与送料机械手夹持器的干涉检查
下模固定于整个机械支架上面,下模的位置不随整体机构的运动而改变,下模与夹持器的设计关系如图5所示,从图5可看出我们只需检查要机械手夹持器在运动过程中是否会对下模产生干涉即可(夹持器与下模间隙不下于25mm)。

表2 冲压周期时间t与规划点对应关系
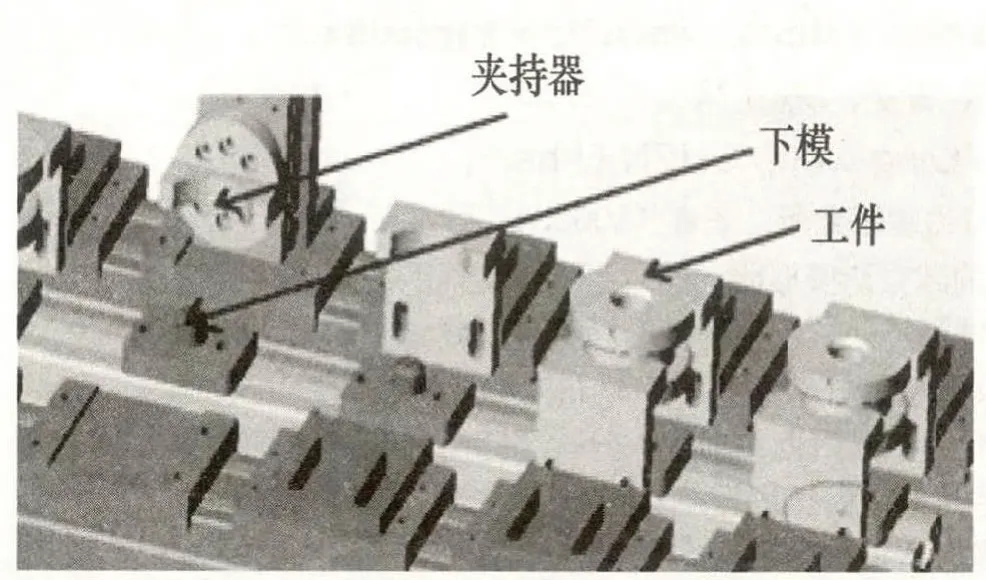
图5 下模与夹持器的关系
通过B样条曲线以下模为基准对机械手夹持器进行轨迹规划,机械手夹持器升降与移送过程和夹张与回退的过程部分编写程序,得出送料过程中与下模的干涉以及送料退料过程上下平面的干涉曲线,如图6所示。
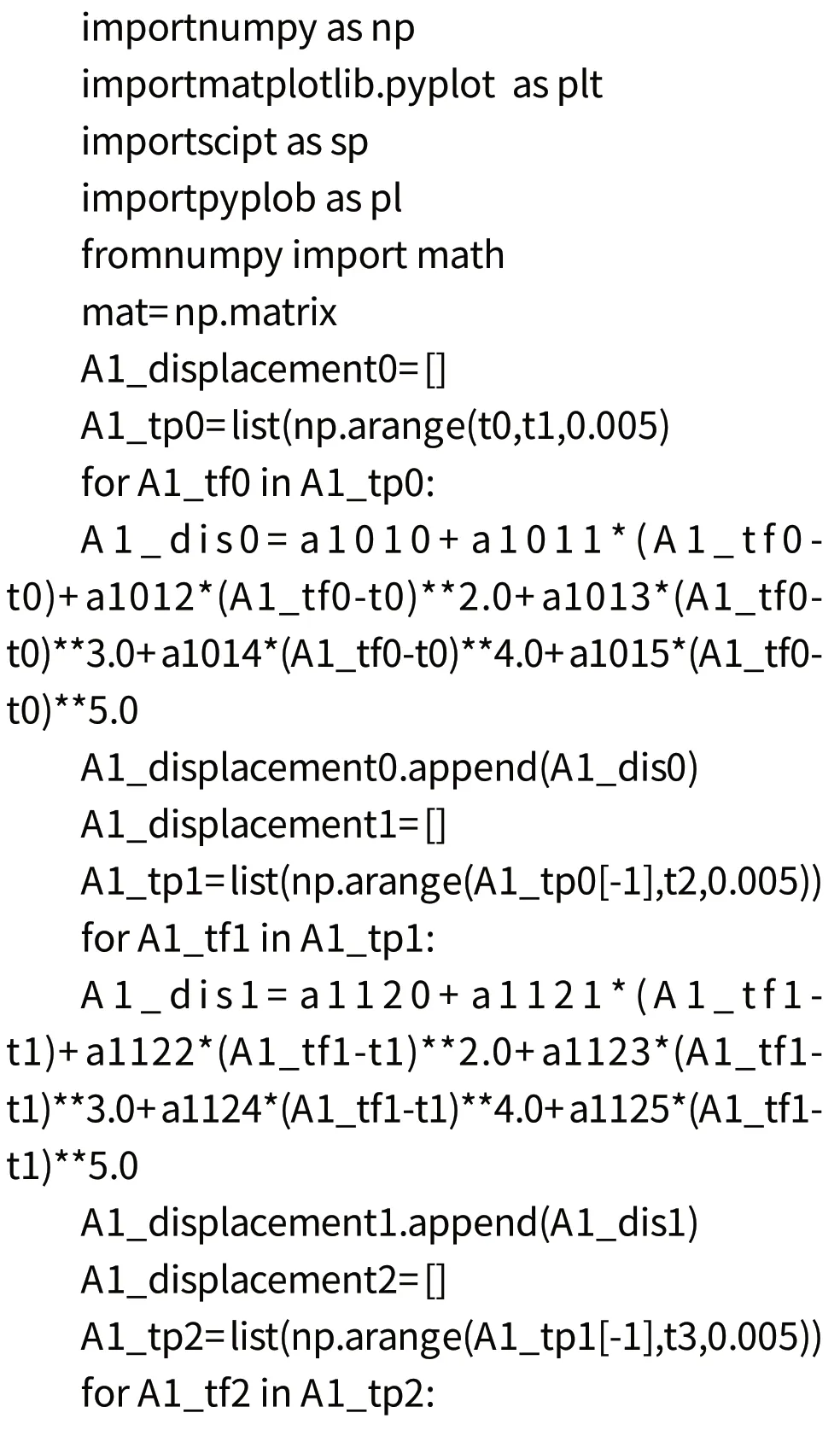
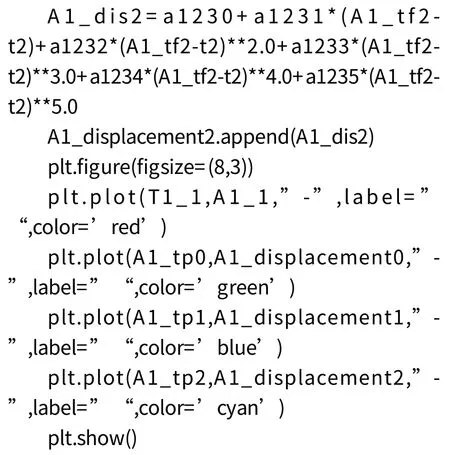
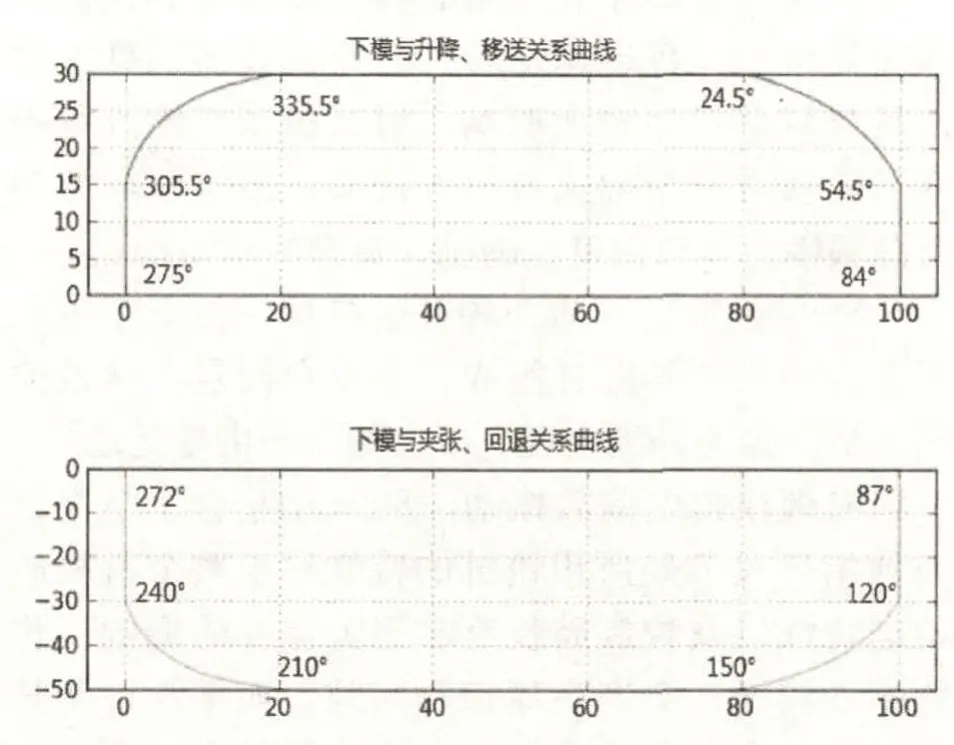
图6 下模与机械手的干涉曲线
3.2.2 冲压滑块与送料机械手的干涉关系
冲压滑块与机械手夹持器一直处于空间运动关系,冲压滑块以行程为100mm,以周期为1.7s进行周期运动的冲压运动,为了使干涉检查更直观,将采用相对位置曲线表示冲压滑块与送料机械手的关系。冲压滑块每进行一周期要转动3600,以冲压滑块曲柄转动的角度变化为基准,反映机械手夹持器的运动轨迹,从而使得从时间和空间上更直观的表示冲压滑块与进给、回退、夹张的干涉问题。图7是从运动分析的角度,绘制空间干涉曲线,对冲压滑块和机械手夹持器进行干涉曲线的绘制和无干涉设计。
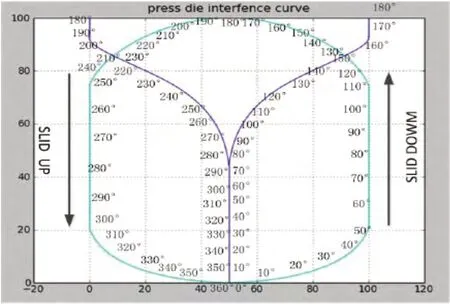
图7 冲压滑块与夹持器干涉曲线
4 结论
本文总结以往干涉设计的不足提出了一种可对多种冲压送料机构进行干涉曲线设计和检查的方法——运动学分析对机构的干涉曲线进行参数化设计,得到三次送料的周期曲线、下模与机械手夹持器的干涉曲线以及冲压滑块与机械手夹持器的整个运动过程的空间干涉曲线,以运动学参数化的方式能够更直观更快速的检查机械结构以及轨迹的规划是否合理性并能够迅速改正,为机构设计提供更有价值的参考。
[1]南雷英,戚春晓,孙友松.冲压生产自动送料技术的现状与发展概况[J].锻压装备与制造技术,2006,41(02):18-21.
[2]方芳,李承璋,方孝安.模具自动化改造技术[J].汽车工艺与材料,2011,31(06):51-57
[3]李傲宏,朱雷.干涉曲线在多工位模具生产线中的应用[J].模具制造,2010,10(03):77-79.
[4]罗云华,张祥林,张颖,黄早文.多工位自动送料系统的无干涉设计与研究[J].锻压技术,2004,29(05):49-52.
[5]谢丹.汽车左右前地板多工位级进模设计方法[J].模具制造,2011,11(05):27-29.
[6]成虹,主编.冲压工艺与模具设计[M].北京市:高等教育出版社,2006.
[7]华中工学院等五院(校)《机械传动及曲柄压力机》编写组[M].机械传动及曲柄压力机.北京市:人民教育出版社,1976.
[8]S.A.Bazaz and B.Tondu.Minimum time on-line joint trajectory generatorbased on low order spline method for industrial manipulators[J].Robotics andAutonomous Systems,29(04):257–268,1999.
[9]L.Biagiotti and C.Melchiorri.Smooth trajectories for high-performance multi-axes automatic machines[A].In Proc.4th IFAC Syposium on Mechatronic Sys-tems[C].Heidelberg,G,Sept.1(02):175-180,2006
[10]陈帆,马志良.基于设计逻辑的参数化模型建立及其特点[J].建筑与文化,2014,15(01):126-127.
[11]孟祥旭,徐延宁.参数化设计研究[J].计算机辅助设计与图形学学报,2002,14(11):1086-1090.
