一种新的毫米波合成孔径雷达成像方法
2014-12-19陈殿仁
刘 颖,陈殿仁,陈 磊
LIU Ying, CHEN Dian-ren, CHEN Lei
(长春理工大学 电子信息工程学院,长春 130022)
0 引言
目前的机载和弹载合成孔径雷达多采用正侧视和斜视的成像模式,使得雷达只能对飞行器两侧的区域目标进行成像[1,2]。前视合成孔径成像雷达是德国宇航局提出的一种可以对雷达载机平台前方扇区场景进行有效成像的一种雷达,可广泛引用于侦查和制导领域,文献[3]中对基于CS算法的前视成像算法进行了详细的推导,文献[4,5]研究了一种扇区增强视觉成像雷达,该雷达采用单一发射天线和多个接收天线组成的天线阵列且接收天线随慢时间在接收天线阵列上切换,等效于在方位向产生一个合成孔径,该方法发射信号和接收信号的距离历程不相同,使得成像算法变得复杂。
本文研究了一种基于毫米波收发模块阵列的前视合成孔径雷达成像算法,分析系统的工作原理,建立了系统的成像几何模型和回波信号模型。分析了该系统的方位特性,详细推导了点目标的回波模型和适用于前视成像的距离徙动算法。采用MATLAB对6点目标的情况进行了成像仿真,并对仿真结果进行了分析,结果表明该系统可以有效的对雷达前视场景进行成像。
1 前视SAR回波数学模型
毫米波前视合成孔径雷达成像系统几何示意图如图1所示,雷达平台到地面高度z=H,雷达平台沿x轴方向(距离像)运动,雷达平台的y轴方向上(方位向)上等间隔的分布着N个毫米波发射接收模块,每个阵元发射和接收共用天线系统,形成SAR成像阵列,该阵列以雷达平台中心为中心,即y=0,在成像过程中,雷达平台以速度vr沿x轴运动,同时,发射接收模块沿y轴正方向以速度va依次切换工作。取切换速率va选择为va=d/PRT=d×PRF,其中d为相邻两个天线系统的距离间隔,即切换频率选择为脉冲重复频率PRF。载机运动速度远小于光束,在任一模块工作过程中,可以认为载机静止不动,对于地面坐标为(x0,y0,0)的P点目标,在一次合成孔径时间内,其最短斜距R0只随慢时间变换,而不随快时间变化[6],即:

则目标到光学系统的距离可以表示为:


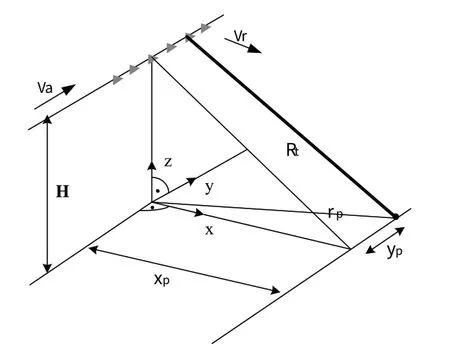
图1 前视SAR成像系统几何示意图
雷达回波经经过光下变频之后可以得到点目标的回波信号数学表达式为:

式 中,γ为距离调频率,c为光速,λ为激光波长,Tp为脉冲重复频率,其中RΔ=R(tm;r)-Rref。将式(3)带入式(4)可得:

2 RMA算法
由式(5)可知,回波信号的相位项可以表示为:

式(6)中,第一个相位项与目标有关的相位项,第二个相位项为成像过程中的相位残留误差。则在成像算法中,需要对相位残留项进行补偿,补偿公式如下:

对方位慢时间作傅立叶变换得:

同时,需要对目标位于Rref处的目标进行二维匹配滤波处理,由上式可知Rref处相位因子:


然后利用STOLT插值

则ku,与x,r-Rref构成傅立叶变换对,对式(11)式作二维逆傅立叶变换可恢复出二维像。
3 系统成像仿真
通过上文的分析,采用如表1所示的雷达参数对6个坐标分别为:(390,300)、(410,310)、(430,320)、(390,300)、(410,290)、(430,280)单位:米)的点目标进行成像仿真,结果如图3~图5所示。
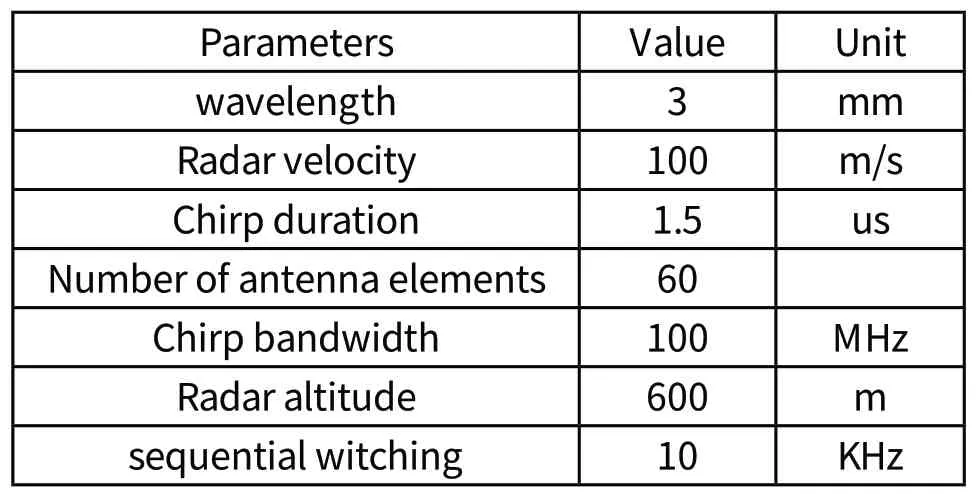
表1 雷达工作参数
图2为目标的回波数据,图3为系统成像结果。成像结果表明,本文提出的毫米波前视合成孔径雷达成像系统可以对前视场景内的目标有效成像。

图2 仿真目标的回波数据
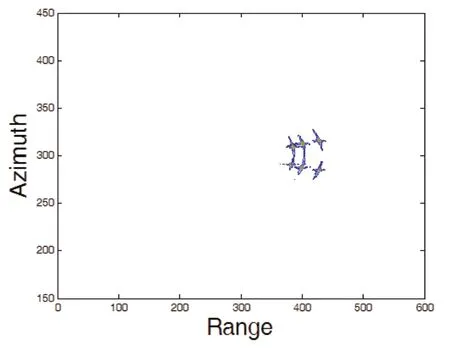
图3 仿真结果
为了对成像结果进行更加深入的分析,以图3中坐标为(390,300)点为例,取成像结果中峰值处64×64点切片进行分析,如图4所示,由图可以看出距离向未出现旁瓣未出现扭曲倾斜,而方位向旁瓣出现了扭曲倾斜,其原因为匹配滤波器方位向调频率随目标距离向坐标的变换而改变[5],引起了方位向旁瓣的适配,但旁瓣扭曲未影响目标的真确成像。

图4 64×64 轮廓图
为了对目标进行进一步的分析,针对坐标为(390,300)点目标,取其成像后的方位向和距离向包络,如图5、图6所示,其中距离向PSLR≈15dB,方位向PSLR≈17dB,可见在距离向和方位像目标聚焦效果良好。

图5 压缩后的距离向包络

图6 压缩后的方位向包络
4 结论
本文研究了一种自发自收式的毫米波前视合成孔径雷达成像系统,雷达系统由收发共用天线系统的毫米波发射接收模块组成,工作时,雷达随载机向前飞行,收发阵列以一定的速度在阵元间依次切换,发射毫米波并接收回波。文中分析了系统的成像原理,给出了点目标的回波模型,详细推导了前视合成孔径雷达成像RMA,并采用MATLAB对6点目标进行了成像仿真,针对仿真结果中的一个点目标取峰值处64×64点轮廓切片和方位向、距离向包络对成像效果进行详细分析,数值分析表明毫米波前视合成孔径雷达成像系统可对前视场景内目标有效成像。
[1]杜汪洋,吴彦鸿,冯庆玉.合成孔径激光雷达研究[J].遥测遥控,2008,29(5):33-38.
[2]吕旭光,郝士琦,冷蛟锋,蔡晓春.基于自适应窗的合成孔径激光雷达联合时频成像方法[J].光子学报,2012,41(5):575-580.
[3]陈 琦,杨汝良.机载前视合成孔径雷达Chirp Scaling成像算法研究[J].电子与信息学报,2008,30(1):228~232.
[4]G.Krieger,J.Mittermayer,M.Wendler.SIREV-Sector Imaging Radar for Enhanced Vision[J].Aerospace Science and Technology,2003,7(2):147-158.
[5]侯海平,曲长文,向迎春.基于LFMICW 的机载SAR前视成像研究[J].电路与系统学报,2011,16(3):1-7.
[6]何劲,张群,杨小优.基于压缩感知理论的合成孔径激光雷达成像算法[J].宇航学报,2011,32(11):2395-2402.
[7]徐刚,李亚超,张磊.基于多视角快拍InSAR干涉技术的前视SAR三维成像[J].电子与信息学报,2011,33(3):634-641.
[8]李桂英,陈磊,陈宇.高准确度多频调制激光测距算法研究[J].光子学报,2011,40(12):1888-1892.
[9]Ian G.Cumming,Frank H.Wong.洪文,胡东辉,译.合成孔径雷达成像-算法与实现[M].北京:电子工业出版社,2012.
[10]苏涛,庄德靖,吴顺君.一种SAR成像快速算法及优化实现[J].光子学报,2005,34(6):956-959.
