焊接机器人的有限元分析与结构优化
2014-12-18崔书婉韦建军
崔书婉,韦建军
(广西科技大学 机械工程学院,柳州 545006)
0 引言
焊接机器人被广泛应用于机械制造、航空航天、建筑、公共交通等领域[1]。但由于国内焊接机器人受其重量和价格等因素的限制,未能在中小企业中得到普及。但焊接机器人鉴于其生产效率高、产品质量稳定等优点,已成为制造业的发展方向[2]。在保证焊接机器人强度的同时实现轻量化不仅可以扩大焊接机器人的适用范围,还能达到降低成本的效果,综上所述对焊接机器人进行结构优化研究具有重要理论与现实意义。
本文以图1所示的焊接机器人为研究对象,对其进行静应力和模态分析以确定其强度与刚度并实际找出可优化部位[3],然后对其进行优化设计,最后对优化后的模型进行分析验证,其具体分析流程如图2所示。

图1 焊机机器人的机械机构图

图2 焊接机器人结构优化流程图
1 静应力分析
1)几何模型的建立
本文运用SoildWorks软件对焊接机器人进行建模,焊接机器人的总装配模型如图3所示。

图3 焊接机器人总装配模型
2)工况分析
由于焊接机器人的底座是固定的,所以当焊接机器人所有臂伸展为最长时(当大臂与小臂水平时),焊接机器人本身重量在重力、负载等作用下,末端执行器变形的位移量是最大的。因此,此时焊接机器人处于最危险工况,本文以该姿态为分析条件对焊接机器人进行研究[4]。利用SoildWorks与ANSYS无缝连接接口直接将大臂CAD模型导入Workbench中进行分析[5,6]。
3)材料定义
焊接机器人材料的属性如表1所示。

表1 材料属性表
4)网格的划分
材料参数设置完毕后,运用Soild45单元对焊接机器人的整体进行网格划分,划分后共形成102756个单元,57437节点。划分后的网格如图4所示。

图4 划分网格后的焊接机器人模型
5)约束与载荷施加
由于机器人的实体模型各部分为刚性连接,所以只施加重力加速度,Workbench软件就会自动对各装配体添加重力。焊接机器人的受力简图如图5所示,底座的4个螺栓孔定为固定约束,焊接机器人的末端为载荷施加位置,其大小为4kg。

图5 焊接机器人的受力简图
6)求解
完成以上设置后可得如图6所示的焊接机器人的应变、应力云图。

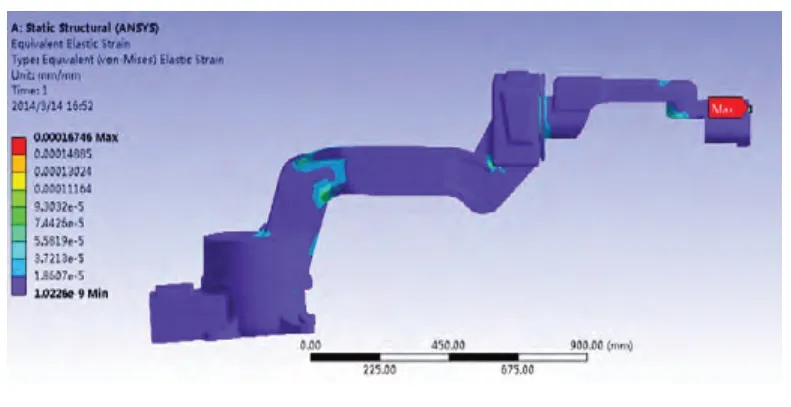
图6 焊接机器人整体的应力、应变图
7)结论
根据图6可知该焊接机器人的整体最大应力值为33.491Mpa,小臂与大臂为最易形变部位。
2 焊接机器人的模态分析
焊接机器人模型如静应力分析一样实施导入、网格划分等技术路线完毕后,在焊接机器人底盘施加约束,对其强迫模态进行求解。求解后前7阶模态的频率值如表2所示,第4~7阶的各阶模态如图7所示。(由于前3阶的频率较小,所以无研究意义不以考虑)

表2 前7阶模态的频率
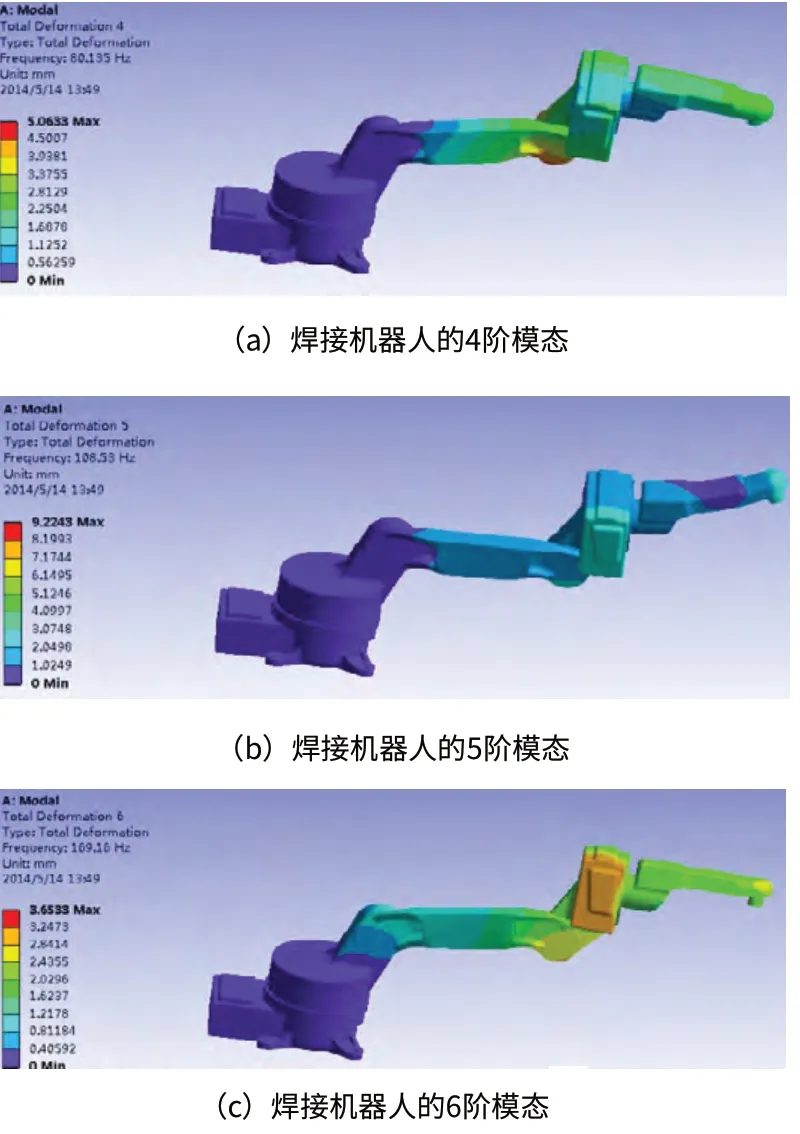

图7 焊接机器人整体结构模态分析
根据生产实际经验与有限元分析结果可知焊接机器人大臂是易破坏部位,因此需对其进行单独分析与优化。
3 大臂结构分析与优化设计方案
1)静应力分析
大臂的静应力分析方法与整体结构分析方法相同,分析后可得图如8所示大臂的应力、应变云图。

图8 焊接机器人大臂的应力、应变图
2)大臂的模态分析
通过有限元分析可得如表3所示前4~7阶固有频率。

表3 大臂结构前4~7阶固有频率
通过对大臂静应力分析、模态分析可知,大臂穿线槽表面部分易变形区域,同时利用拓扑优化方法分析可知,大臂上表面有较多的质量富余,可以适当剔除。结合实际加工情况,提出改进方案:
1)于大臂上部的两板间增加一条加强筋;
2)剔除大臂上表面部分材料,优化后的大臂结构如图9所示。

图9 优化后的大臂结构
4 优化效果验证
1)强度校核
将优化后的结构再次导入有限元分析软件中,进行应力分析。结果表明改进后的结构在质量减轻7.27%同时应力下降了28.59%。
2)刚度校核
将优化后的结构导入有限元分析软件中,对其模态进行计算,可得如表四所示的计算结果。由于动刚度和固有频率二次方成正比例关系,因此大臂的刚度变化可以通过固有频率来验证[7,8]。通过将改进前的前4~7阶固有频率与改进的前4~7阶固有频率对比,可以发现改进后结构的刚度得到明显的提升。

表4 大臂结构前4~7阶固有频率对照表
5 结束语
本文以焊接机器人为研究对象,对其进行静应力分析、模态分析。结合分析结果与实际找出易破坏位置,并对其单独进行结构分析与优化,优化前后的结果对比表明:该方法有效可行,为经济型焊接机器人的后续市场化奠定了坚实的基础。
[1]胡绳荪.焊接自动化技术及其应用[M].北京:机械工业出版社,2007:2-4.
[2]林尚武,陈善本,李成桐,焊接机器人及其应用[M].北京出版社,2000.
[3]姜凤鹏.基于ADAMS和ANSYS的贴片机力学分析与结构优化[D].上海:上海交通大学,2008.
[4]肖智勇,段建中,杜鑫强,李建.Motoman工业机器人有限元静态分析及改进设计[J].长沙理工大学学报,2011(12):71-75.
[5]祝效华,余志祥.ANSYS高级工程有限元分析范例精选[M].电子工业.
[6]浦广益.ANSYS Workbench12基础教程与实例详解[M].北京:中国水利水电出版社,2010:65-69.
[7]杨小卫,刘咏萱,周孔亢,李苗. 车辆驾驶室顶板振动的影响分析[J].机械工程学报.2009(08).
[8]夏青松.轿车车身分析模态与试验模态对比研究[J].汽车科技.2008(01).
