大型冷凝器清洗机器人设计及运动学分析
2014-12-05夏汉民王耀南曹文明
夏汉民 王耀南 印 峰 曹文明
湖南大学,长沙,410082
0 引言
冷凝器是制药、电力、化工等行业的大型换热设备,在汽轮机装置的热力循环中起冷源的作用,以降低汽轮机排汽温度和减小排汽压力,提高循环热效率,在电厂、制药、化工等行业有广泛应用[1]。冷凝器内部具有数以万计的冷凝管,由于冷凝器运行时冷却水不洁净,热交换时常有化学反应等原因,故在长时间使用后,会导致冷凝管内壁积聚大量污垢而引发一系列危害,如增加循环水泵的能耗、降低发电机的效率和机械性能、导致冷凝管堵塞而影响设备的运行甚至造成事故。因此,对冷凝管的清洗可以预防重大生产事故的发生,提高冷凝器的工作效率,起到节能降耗的作用。目前,对冷凝器污垢的清洗多采用人工清洗或胶球清洗,但由于电厂作业环境恶劣,冷凝管数量多,人工清洗的劳动强度大,而且作业时机组不能正常运行,故无法满足安全生产和大规模生产的要求;而使用胶球清洗则存在冷凝管容易堵塞、胶球的回收率低、由化学反应形成的析晶污垢不能完全清除等缺点。因此,针对现有清洗方法的不足,笔者研制开发了一种能够对冷凝器进行长期自主在线清洗,清除冷凝管内壁的污垢的智能机器人。本文主要介绍了该机器人的结构及运动学特性。
1 冷凝器清洗机器人机械系统结构
1.1 设计要求
要求冷凝器清洗机器人能够对电厂、化工、制药等行业使用的冷凝器进行自主在线清洗。机器人在分布式计算机控制系统的控制下,能够在冷凝器水室比较恶劣的环境中安全稳定地运动,快速精确地定位每一根冷凝管,并能准确地在线监测冷凝器的结垢程度,自动确定清洗策略,进行有效清洗。
1.2 总体结构
机器人工作于冷凝器水室,且水室地面很不平整,作业环境复杂、多变,对机器人本体机构的可靠性和运行要求较高。本文设计的自动清洗机器人能够利用高压水射流对冷凝器进行在线清洗,其总体结构主要包括履带行走机构、回转支承机构、大臂、小臂和喷枪机构。
1.3 履带行走机构
要完成对整个水室中冷凝器管束的清洗,机器人就必须具有移动性,而且采用高压水射流清洗方式,喷出的高压水会对机器人本体产生一定的反作用力,使机器人偏离预定的水平轨迹,这样就要求机器人与地面有足够大的摩擦力,以克服高压水喷出时对机器人的影响。履带结构能够增大与地面的摩擦力,因此采用履带结构作为机器人的底盘结构。
冷凝器水室的地面有一定泥沙的堆积,并不完全是平坦的,但对机器人的越障能力要求也不高,故采用履带行走机构,其结构主要包括驱动轮、底盘支架、托轮、支重轮、从动轮、履带、张紧装置、履带支架等。底盘支架是履带行走机构和回转支承机构的连接部分,固定在车架上。张紧装置具有调节履带张紧力的作用,它与从动轮相连。两个托轮托起上履带全盘,避免了上履带的中间部分下垂。支重轮的作用主要是使履带机构更平稳可靠地移动。清洗机器人履带行走机构的两个驱动轮分别由两台伺服电机驱动,能够实现机器人的直线运动和转向。
1.4 大臂
大臂主要包括回转支承机构和主机架机构两部分。回转支承机构能够实现左右360°任意旋转,使枪口平面与冷凝管壁平面平行。由于运动过程中的高压水反冲力以及控制误差,清洗机器人在执行清洗任务时,喷枪平面与冷凝管壁可能无法保持平行。清洗机器人可通过调整回转支承的位置,使两者重新达到平行。
主机架机构是小臂和驱动系统的连接机构,用以将小臂牢牢固定在回转支承上,它主要包括主机架、齿条、齿条座、电机控制线伸收机构及进水管等部分。圆底盘和回转支承连接在一起,圆底盘上的机器人机构通过控制回转支承实现转动。主机架主要包括主轴、中间立柱、侧立柱、方形斜立柱等,是机器人小臂的固定支撑机构。齿条的主要作用是带动主轴旋转,使小臂能完成360°任意旋转。进水管连接着外部高压水管,高压水由进水管进入,从而实现喷枪的高压水射流清洗。电机控制线伸收机构的主要作用是防止在小臂运动时控制信号线发生绞线。
1.5 小臂
小臂与主机架主轴相连,能够绕主轴360°上下任意旋转,主要包括进水管伸缩机构和喷枪移动机构两个部分。
喷枪沿着小臂长丝杆上下移动时会引起进水软管上下拉伸。进水软管的伸缩由进水管伸缩机构负责。进水软管通过进水管口与伸缩机构相连,然后通过导轮沿着伸缩机构壁与喷枪机构上的进水管相连。在旋转过程中,为使清洗臂两端达到平衡,进水管伸缩机构还具有配重的作用,使清洗臂旋转所需要的推力大大减小。
喷枪移动机构主要包括喷枪导杆组件、进水管导座、进水管、长丝杆、丝杆伺服电机、清洗喷枪及摄像机等。丝杆伺服电机通过螺母带动长丝杆旋转,使喷枪能够沿着喷枪导杆组件和丝杆上下移动。在喷枪移动到位后,高压水会经软管及与软管相连的硬水管注入喷枪,形成高压水射流。摄像机主要用于冷凝管的视觉定位,具有位置补偿作用。
1.6 喷枪机构
机器人的喷枪是执行清洗的关键部件,当喷枪口定位到冷凝管管口中心时,就可以启动相应机构进行高压水射流清洗。喷枪机构主要包括紧定螺钉、铜螺母、喷嘴、喷嘴支座、喷嘴滑座、O形密封圈、压簧等。喷嘴支座通过紧定螺钉固定在喷枪移动机构的长丝杆上,喷枪在铜螺母的作用下,能够沿着长丝杆上下移动。O形密封圈的主要作用是防止水的溢出。压簧装在喷嘴与喷嘴滑座之间,当高压水的压力大于压簧的弹簧反压力时,就迫使喷嘴伸出到冷凝管内,同时高压水从喷枪里射出,对冷凝管进行清洗。
2 D-H坐标系统
冷凝器清洗机器人的机械臂主要包括三个部分:大臂、小臂和喷枪。大臂可以实现左右360°任意旋转,小臂可绕大臂的出水管进行上下360°任意旋转,喷枪可以沿小臂做直线运动。喷枪依赖大臂、小臂和自身的运动对冷凝管进行精确定位。机械臂有三个自由度,其关节结构包括两个转动关节1、2和一个移动关节3。采用D-H方法[2]建立连杆坐标系,如图1所示,其中α为大臂与水平方向的夹角,l1、l2分别为大臂和小臂的长度,喷枪沿小臂能够移动的最大距离为l3,d为喷枪的长度。由于喷枪的长度对运动学分析并无太多影响,为便于分析,假定喷枪长度为0,起始位置时喷枪移动了最大距离l3。相应的连杆参数如表1所示。其中,θ1、θ2表示两个转动关节1、2旋转的角度,θ3表示喷枪沿小臂移动的距离,其范围为0~l3(0~2.5m)。
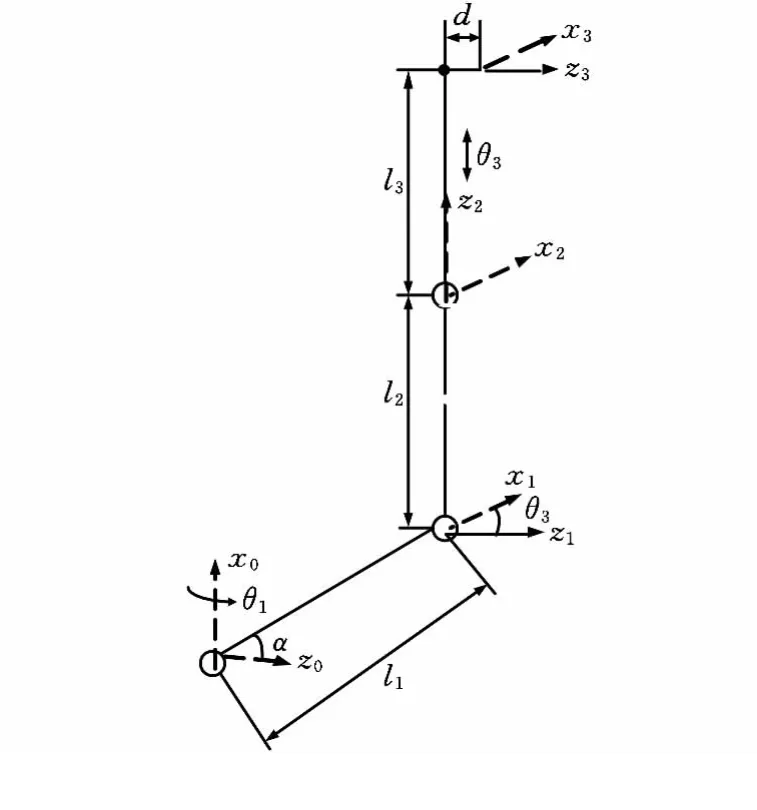
图1 冷凝器清洗机器杆件坐标系
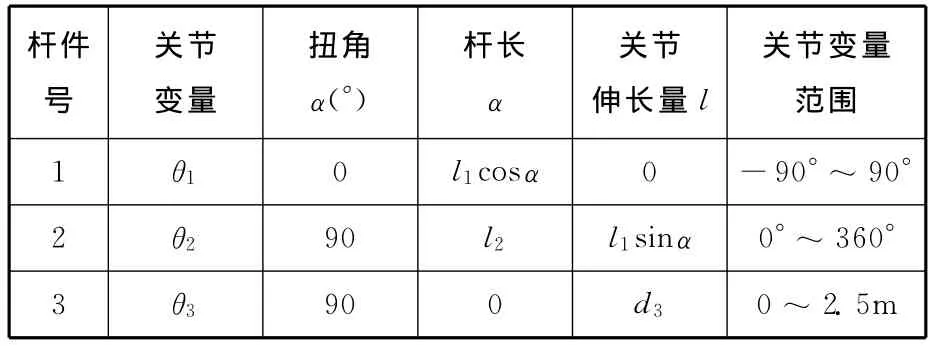
表1 冷凝器清洗机器人各连杆参数
3 冷凝器清洗机器人运动学分析
3.1 正运动学分析
假设Ai为连杆坐标系i相对于连杆坐标系i-1的齐次变换矩阵。根据表1的各连杆参数,可求得各杆系的变换矩阵及机器人末端在基础坐标系的位姿矩阵。即
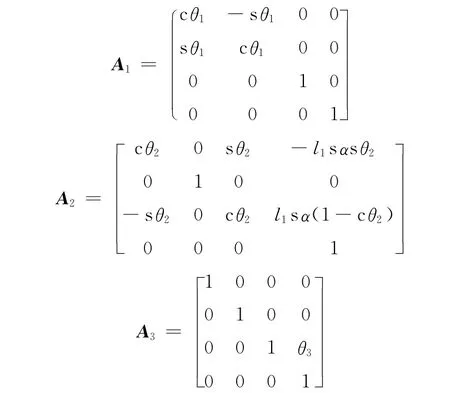
其中,cθi表示cosθi,sθi表示sinθi。
机器人末端在基础坐标系中的位姿矩阵为

机器人的位置矢量为
得
在表1所描述的关节运动范围内,由式(3)~式(5),采用蒙特卡罗方法[3],得到末端工具相对于惯性坐标系的三维工作空间,如图2所示。图3所示为垂直平面的工作空间。冷凝器清洗机器人喷枪必须在冷凝器管板平面上运动,以实现对管孔的精确定位,它的工作空间范围是一个平面。由图2和图3可以看出,该机器人机械臂的运动范围可以覆盖整个平面,能够满足喷枪的工作空间要求。
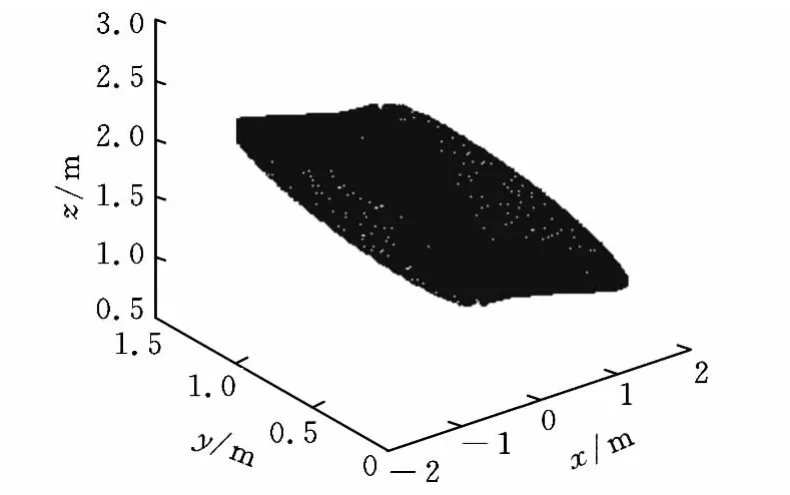
图2 机器人三维工作空间
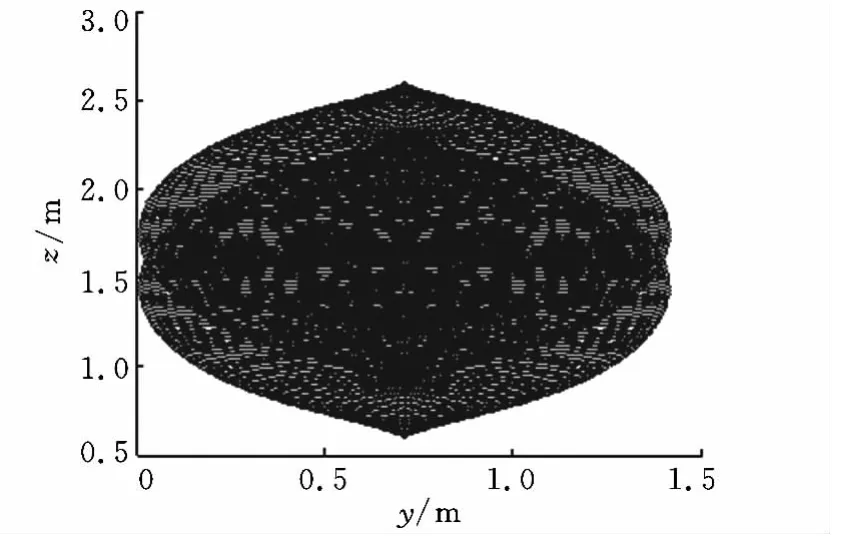
图3 机器人垂直平面工作空间
3.2 逆运动学求解
逆解实质上是根据机器人末端操作器的位姿反求机器人各关节的关节角。根据正解结果,由式(5)、式(6)得

则有
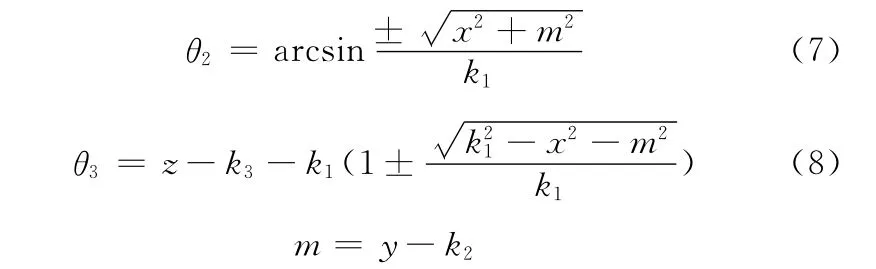
由以上分析可知,θ2、θ3都有两个解,因此机器人的关节变量有4组解,这容易引发关节突变问题。为了保证关节运动路径的连续性,除了表1的各关节变量的限制外,还应使关节的改变(即|Δθ2|+|Δθ3|)最小,其中Δθ2、Δθ3分别为关节2和关节3的改变量。
4 运动学仿真与分析
图4为冷凝器管板实物图。冷凝器清洗机器人必须根据凝汽器的管束布置,沿x、y、z方向精确定位,保证每一根铜管均能得到清洗。假定清洗机器人按图5所示的轨迹运动。

图4 冷凝器水室管板
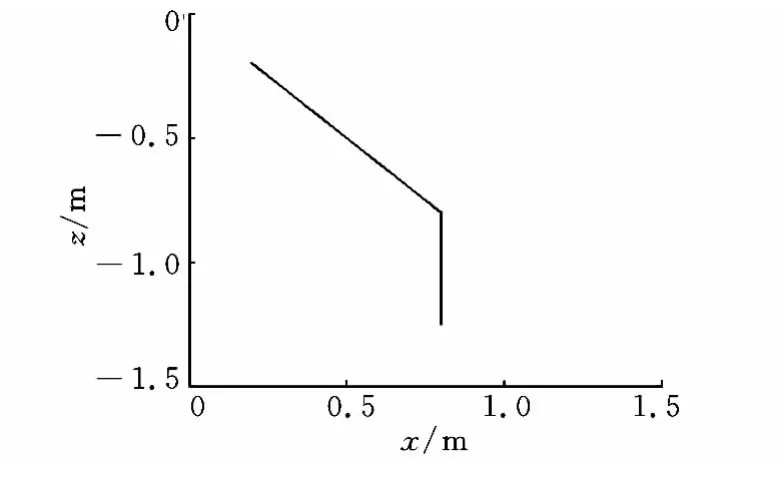
图5 机器人在oxz平面上的轨迹
假定关节的初始位置分别为π/3、0、0,末端执行 器 的 速 度 分 别 为 0.3rad/s、-0.4rad/s、0.5mm/s,仿真时间t的范围是0~8s。机器人的参数如下:各杆长度分别为1.0m、0.7m、0.6m,质量分别为5kg、3kg、2kg,大臂与水平方向的夹角α=π/4。机器人各关节的运动规律见图6,机器人各关节的速度曲线见图7。
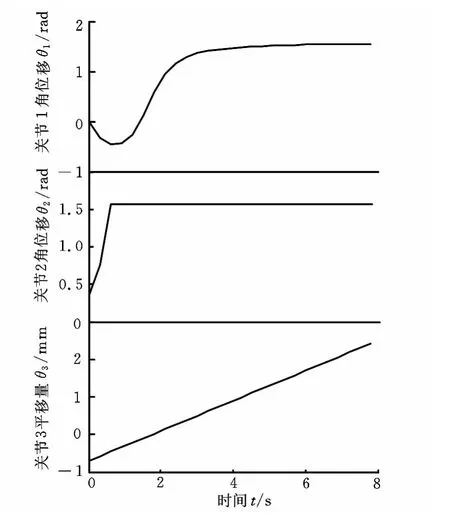
图6 机器人各关节的运动规律

图7 机器人各关节的速度曲线
从图6可以看出,在运动过程中,关节1和关节2的角位移随时间逐步增大,当角位移达到1.5rad以后,很快就趋于平稳。关节3是移动关节,其平移量随时间平稳增大。这些都与实际情况基本吻合。刚开始时,关节1方向有变化,运动不是很平稳,这可以通过改变初始位置来进行调整。在图7中,关节1和关节2的角速度随时间逐步增大,当达到峰值后就逐渐减小,然后很快就趋于稳定,速度趋近于0,这与实际情况也基本相符。总体来看,各关节的运动还是比较平稳的,运动性能相对稳定,具有一定的灵活性,能够满足末端执行器的运动要求。
5 结论
(1)本文设计了大型冷凝器清洗机器人,该机器人结构简单,易于控制,能够对冷凝器进行长期自主在线清洗。
(2)建立了冷凝器清洗机器人运动学模型,机器人的工作空间能够覆盖整个冷凝器管束的分布空间,具有一定的灵活性,能够满足机器人的定位要求,可以定位到冷凝器的任意铜管。
(3)获得了运动学逆解,解决了逆解的多值问题。
(4)对冷凝器清洗机器人进行了运动学仿真分析,机器人运动的连续性表明,其设计是合理的,能够满足其工作需要,为进一步研究奠定了基础。
[1]张辉,王耀南,彭金柱.电厂冷凝器清洗机器人设计与控制方法研究[J].湖南大学学报(自然科学版),2008,35(6):31-35.Zhang Hui,Wang Yaonan,Peng Jinzhu.Research on the Design and Control Strategy of Cleaning Robot for Power Plant Condenser[J].Journal of Hunan University(Natural Science),2008,35(6):31-35.
[2]于靖军,刘新军,丁希仓,等.机器人机构学的数学基础[M].北京:机械工业出版社,2008.
[3]李群智,王树新,丁杰男,等.喉部外科手术机器人系统机构设计与运动学分析[J].机器人,2006,28(6):553-559.Li Qunzhi,Wang Shuxin,Ding Jienan,et al.Mechanism Design and Kinematics Aanlysis of a Robot-Assinsted Laryngeal Surgery System[J].Robot,2006,28(6):553-559.
[4]印峰,王耀南,余洪山.基于蒙特卡罗方法的除冰机器人作业空间边界提取[J].控制理论与应用,2010,27(7):891-896.Yin Feng,Wang Yaonan,Yu Hongshan.Workspace Boundary Extraction of Deicing Robot Based on Monte Carlo Method[J].Control Theory & Applications,2010,27(7):891-896.
[5]姜宏超,刘士荣,张波涛.六自由度模块化机械臂的逆运动学分析[J].浙江大学学报(工学版),2010,44(7):1348-1354.Jiang Hongchao,Liu Shirong,Zhang Botao.Inverse Kinematics Analysis for 6Degree of Freedom Modular Manipulator[J].Journal of Zhejiang University(Engineering Science),2010,44(7):1348-1354.
[6]马博军,方勇纯,张雪波.具有冗余度的移动操作臂逆运动学分析[J].控制工程,2008,15(5):614-618.Ma Bojun,Fang Yongchun,Zhang Xuebo.Inverse Kinematics Analysis for Mobile Manipulator with Redundant DOFs[J].Control Engineering of China,2008,15(5):614-618.
[7]周风余,李贻斌,王吉贷,等.高压输电线路自动巡线机器人机构设计及在约束条件下的逆运动学分析[J].中国机械工程,2006,17(1):4-8.Zhou Fengyu,Li Yibin,Wang Jidai,et al.Design of the Mechanical Configuration of Inspection Robot for High Voltage Power Transimission Lines and A-nalysis on Its Inverse Kinematics with Constraints[J].China Mechanical Engineering,2006,17(1):4-8.
[8]刘万里,欧阳键飞,曲兴华,等.激光制导测量机器人系统设计及运动学分析[J].机械工程学报,2008,44(9):117-122.Liu Wangli,Ouyang Jianfei,Qu Xinghua,et al.Design and Kinematics Analysis of Laser Guided Measurement Robot System[J].Journal of Mechanical Engineering,2008,44(9):117-122.
[9]Tarokh M,Kim M.Inverse Kinematics of 7-DOF Robots and Limb by Decomposition and Approximation[J].IEEE Transations on Robotics,2007,23(3):595-600.
[10]Kucuk S,Bingul Z.The Inverse Kinematics Solution of Fundamental Robot Manipulators with Offset Wrist[C]//Proeedings of the 2005IEEE International Conference on Mechatronics.Taipei,2005:197-202.
[11]Li Zhiguo,Liu Jizhan,Li Pingping,et al.Analysis of Workspace and Kinematics for a Tomato Harvesting Robot[C]//2008International Conference on Intelligent Computation Technology and Automation.Changsha,2008:823-827.
[12]Wang Xintao,Duan Xingguang,Huang Qiang.Kinematics and Trajectory Planning of a Supporting Medical Manipulator for Vascular Interventional Surgery[C]//Proceedings of the 2011IEEE/ICME International Conference on Complex Medical Engineering.Harbin,2011:406-411.