RFID防碰撞算法应用研究
2014-11-29高增貊
高增貊,路 勇
(北京交通大学 电子信息工程学院,北京 100044)
射频识别技术(RFID, Radio Frequency Identification),又称无线射频识别,是一种基于应答器与读写器间无线通信的自动识别技术。RFID通过无线信号实现识别目标,读取目标数据和修改目标数据。射频识别系统主要包括两部分,读写器和应答器。
在单一读写器和多个应答器存在的系统下,很容易出现多个应答器同时响应读写器的情况,这会影响读写器的正常工作,所以选择适当的防碰撞算法对于应用RFID系统具有重大意义。
1 防碰撞经典算法
1.1 随机思想算法
1.1.1 帧时隙ALOHA(SFA)算法
时隙ALOHA算法[1]首先定义一个统一的帧长度,这个帧由若干个时隙组成,时隙的长度就是应答器接收到读写器广播信号后发送应答的时间。
当应答器首次接受到读写器的广播信号的时候,应答器会随机选择一个时隙,当到时间到此时隙时,应答器返回应答信息。此时的各个时隙内存在的应答器数量可分为3类,因此操作也分为3类。
(1)第1类是没有应答器,那么就直接到下一个时隙。
(2)第2类是有两个或以上应答器,此时多个应答器发送应答信号,那么读写器就不能够完成识别,因此也会继续下一个时隙。
(3)第3类是有一个应答器,此时读写器成功识别应答信息,之后会发送选择信号,对此应答器进行读写,完成后会进入下一个广播周期。
只有之前选择应答器被操作完后,其他在读写器范围内的应答器才能进行一个新的寻呼过程。
1.1.2 动态帧时隙ALOHA(DFSA)算法
动态帧时隙ALOHA算法[1]是对帧时隙算法的改进,由于帧时隙算法的吞吐率不稳定,只有在时隙数和应答器数相等的情况下才能够有比较良好的表现,所以动态帧时隙ALOHA算法针对这种情况进行改进。
当每个时隙内都存在两个或者两个以上的应答器时,读写器此帧内没有读取到任何应答信息,所以下一次会调整每帧内时隙数量(1, 2, 8, …),即帧长度,直到唯一的应答器被识别。此种情况使得读写器产生帧的时隙数会随着应答器数量变化,因此使得效率一直保持比较好的状态。
1.1.3 动态随机数算法
动态随机算法[2]的原理和动态帧时隙ALOHA算法类似。每次的读写器寻呼都会发送一个Q值,每个应答器会在1~2(q-1)范围内随机选取一个计数。如果应答器的计数为0,则返回应答信息。读写器会对接收到的应答信息进行如图1所示。
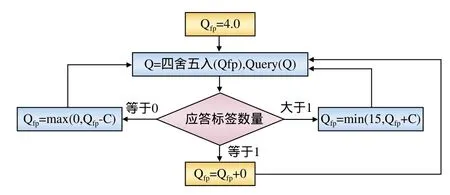
图1 随机数Q值变化示意图
(1)如果有一个应答,则发送命令领每个应答器内计数都做减1处理,然后进入下一个接收周期。
(2)如果有多个应答,则增加Q值,并且从新分配应答器计数,然后进入下一个接收周期。
(3)如果没有应答,则减小Q值(保持大于0),并且从新分配应答器计数,然后进入下一个接收周期。
1.2 基于二分搜索的确定算法
1.2.1 二分搜索算法
二分搜索算法(Binary Search)[1]的整个寻呼机制不同于上述的所有随机方法。首先,二分搜索算法需要确定具体的碰撞的位置,如果用常规的0和1代替高低电平,即不归零码表示信号,那么当出现多个应答器碰撞的时候,接收的信息也能够读出,但是此时接收到的信号是多个应答器信号叠加结果,接收器接收到的信号是错误的,如图2所示。
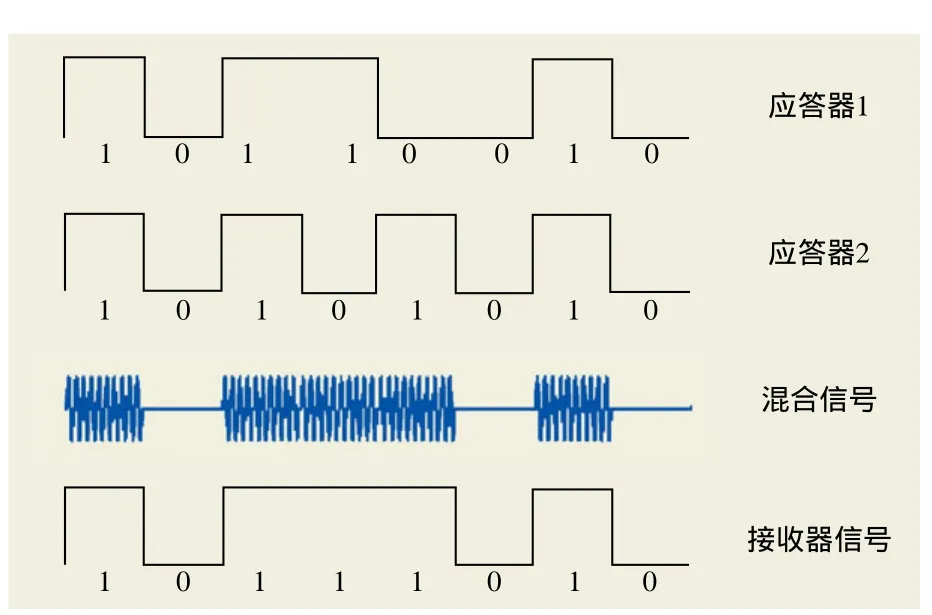
图2 无基带编码导致接收错误
对于此问题的解决方法就是对信号进行编码,通常采用曼彻斯特码。曼彻斯特码的0和1表示如图3所示。
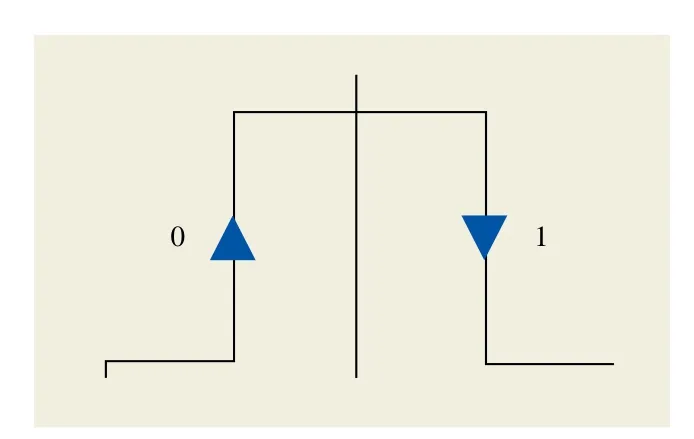
图3 曼彻斯特码
如果对于信号进行曼彻斯特编码,那么对于存在碰撞的情况就会很容易的检测出来,因为产生碰撞的地方会无法解码,具体情况如图4所示。

图4 采用曼彻斯特码检测碰撞位
对于二分搜索算法实现,首先应答器都有唯一的二进制序列作为自身的ID,之后读写器会用同样长度的发送序列以及如下指令配合进行筛选:
(1)REQUEST指令:发送一个二进制序列给应答器,如果应答器的数字序列小于读写器发送过来的序列,则应答器把自己的序列返回给读写器。
(2)SELECT指令:发送一个通过算法决定的序列给应答器,如果应答器的序列与发送过来的序列相等,此应答器被选中。
(3)READ指令:对选中的应答器内的数据进行操作。
(4)UNSELECT指令:取消之前被选择的应答器的被选择状态和使应答器灭活,此时应答器不会响应REQUEST指令。
每个周期,读写器首先发送REQUEST指令,一般发送同样长度的最大二进制序列,即全1序列。此时所有的应答器都会把自己的序列返回给读写器,根据译码,能够检测出碰撞位,根据最高碰撞位,改变下一次命令REQUEST发送的序列,改变规则是:首先,基序列是上一次的发送序列,把此序列的最高的碰撞位置定位为0,此序列的最高碰撞位之前的各位值和发生碰撞的应答器ID对应位保持一致,新的发送序列因此会变小,因此每次改变序列会减少选中的应答器,直到选中一个应答器完成一次识别。然后,识别出的应答器会被SELECT,READ和UNSELECT操作,因此之后这个应答器不会再响应REQUEST命令。重复此流程直到所有的应答器都被识别,整个流程如图5所示。
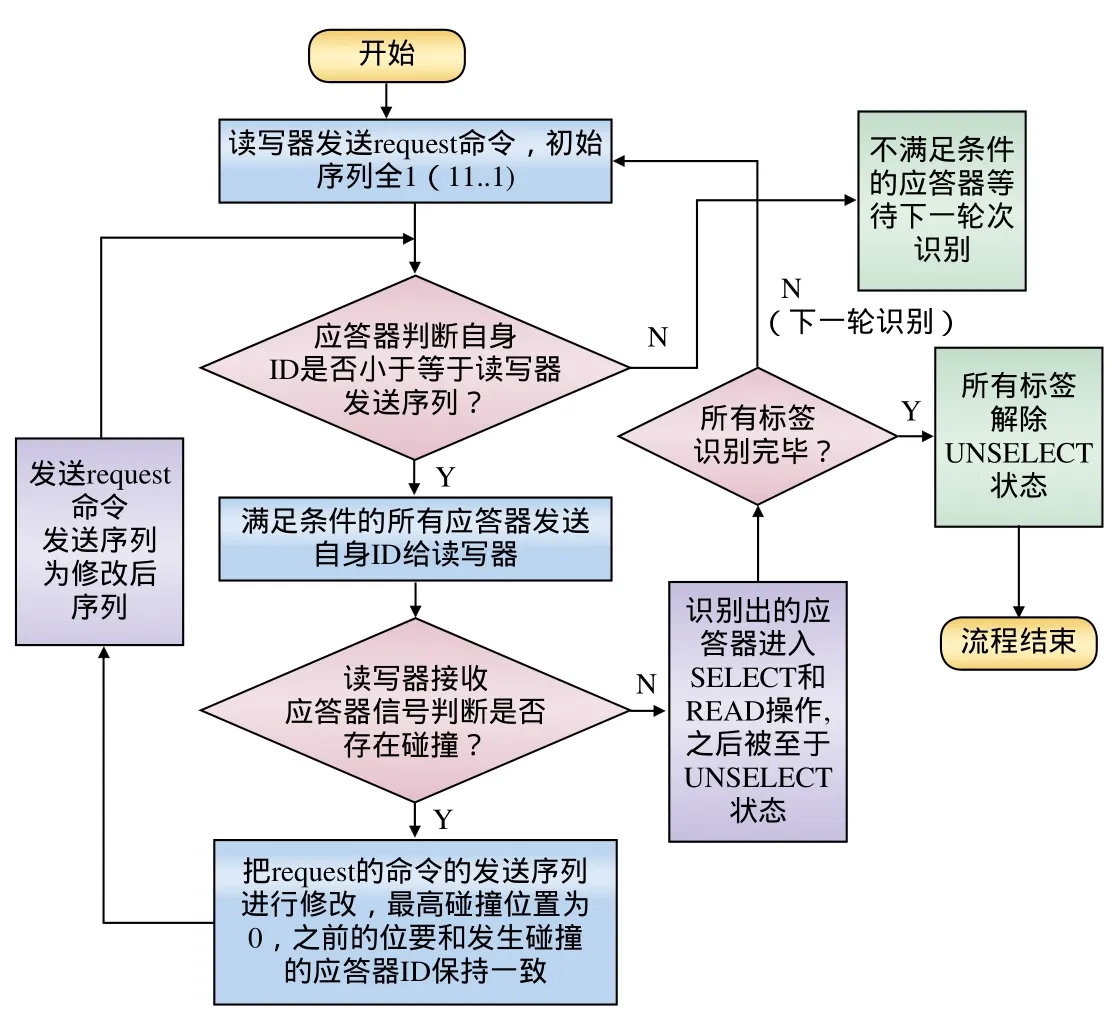
图5 二分搜索算法流程
1.2.2 动态二分搜索算法
动态二分搜索算法[1]是对上述的二分搜索算法的裁剪,区别在于读写器每次发送的REQUEST命令发送的二进制序列和应答器回复的二进制序列。此算法中,每次REQUEST发送的二进制序列是上一次碰撞最高位和其前面位的处理部分,而应答器返回的是上一次碰撞最高位之后后面的部分,这样能够大量减少冗余序列的发送。
2 算法仿真分析
本文对于上述的两个经典算法,动态帧时隙ALOHA和动态二分搜索算法,进行了MATLAB仿真,所得的结果主要是针对不同应答器个数的情况下,读写器的寻呼次数比较。
对二分搜索算法在不同长度序列下,同时识别1~100个应答器的模拟仿真,比较序列长度和寻呼次数是否存在关系,如图6所示。图中表明序列长度和寻呼性能在此数量应答器情况下无明显关系,但是按照二分搜索算法原理可知道序列长度决定了识别范围。假设初始的序列长度为L,那么二分搜索算法的防碰撞范围是1-2(L-1)。
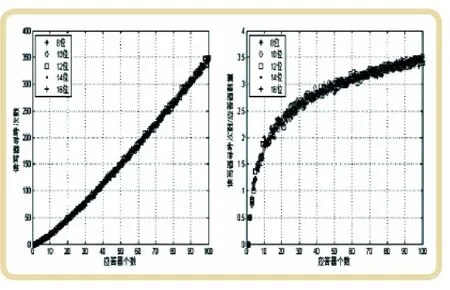
图6 序列长度和寻呼次数
之后对于动态帧时隙ALOHA(DFSA)算法和动态二叉树搜索(DBS)算法进行了仿真比较,如图7所示。DFS算法初始帧时隙是24个,之后指数4会根据碰撞结果增加或减小;DBS初始的序列长度为8位。如图7所示,在应答器数目较少的情况下,DBS算法表现出了良好的搜索性能,随着应答器数量的增加,DFS的曲线追了上来,到100之后已经优于了DBS算法。当两个算法的复杂度是不一样的,由第二部分介绍原理时可以了解到,DBS的设计难度要高于DFS,因为DBS实现中需要添加曼彻斯特码的编码解码模块,而DFS只需要分配随机的时隙即可。因此在实际应用中,DFS会比较容易实现。
3 结束语
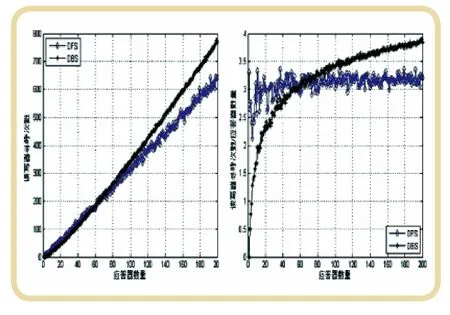
图7 动态帧时隙ALOHA算法和动态二叉树搜索算法进行了仿真比较
本文介绍了RFID经典的防碰撞算法,并对其中经典的动态帧时隙ALOHA算法和动态二分搜索算法进行了仿真分析,从寻呼次数的角度分析了两者在性能上的优缺点。可以看出,动态帧时隙ALOHA算法实现简单,寻呼次数和应答器个数存在稳定的线性关系;动态二分搜索算法需要编码解码帮助识别碰撞位。能够在应答器较少的情况下产生优秀的识别性能,但是性能会随着应答器数量的增加而恶化。
除了经典算法外,可以根据需要选择改进算法。对于随机类算法,都是基于动态帧时隙ALOHA算法的改进算法,可以从分组[3],预估标签[4]等角度去改进;对于确定性的二分搜索算法可以通过编码方式变化[5],记录碰撞位[6]操作等减弱动态二分搜索算法大量应答器情况下的恶化效果。
在RFID应用于各类产品的时候,防碰撞算法的选择不可避免,针对应用环境的不同,选择适应的防碰撞算法能够更有效地完成识别。
[1]Klaus Finkenzeller . RFID HANDBOOK FUNDAMENTALS AND APPLICATIONS IN CONTACTLESS SMART CARDS,RADIO FREQUENCY IDENTIFICATION AND NEARFIELD COMMUNICATION (3nd Edition)[M], John Wiley& Sons Ltd, 2010.
[2]刘 佳,张有光.基于时隙的RFID防碰撞算法分析[J].通信与网络,2007(5):95-96.
[3]尹 君,何怡刚,李 兵,邓 晓,谭阳红,肖迎群.基于分组动态帧时隙的RFID防碰撞算法[J].计算机工程,2009,20(35):267-269.
[4]陈春明,冯玉田,付良成. RFID动态帧时隙防冲突改进算法研究[J].电子技术应用,2013(1):86-89.
[5]李世煜,冯全源,鲁 飞.基于BIBD(4,2,1)的防碰撞算法[J].计算机工程,2009,3(35):279-281.
[6]王 雪,钱志鸿,胡正超,李奕男.基于二叉树的RFID防碰撞算法的研究[J].通信学报,2010,6(31):49-57.