基于DGPS的组合定位系统研究与设计
2014-08-01杨志杰
刘 佳,杨志杰
(1. 中国铁道科学研究院,北京 100081;2.中国铁道科学研究院 通信信号研究所,北京 100081)
基于DGPS的组合定位系统研究与设计
刘 佳1,杨志杰2
(1. 中国铁道科学研究院,北京 100081;2.中国铁道科学研究院 通信信号研究所,北京 100081)
本文介绍一种基于DGPS、地面仿真平台和应答器定位的组合定位技术,该技术提高了DGPS的定位精度。提出一种里程平滑算法,改善了DGPS在不利环境条件下的应用,现场试验证明该组合定位系统能够提高列车定位的精度、连续性与可靠性。
DGPS伪距定位;定位误差;仿真平台;里程平滑算法
GPS伪距差分技术(DGPS)是目前常用的高精度定位技术,广泛用于车辆的导航与定位[1],由于DGPS定位存在一定误差,故很多试验采用组合定位系统[2],如GPS与惯性导航组合[3]、GPS与里程计定位组合[4]、地图匹配算法[5],但惯性导航组合与里程计需要额外的传感器单元,成本较高且需要数据融合算法,增加了系统的复杂性。地图匹配算法依赖于地图匹配的处理,实时性和准确性受到一定的影响。此外,应答器定位为单一的点式定位,需要与其它定位技术相结合才能实现连续式定位。
列控系统动态仿真试验利用地面仿真平台、ATP、应答器传输模块(BTM)、GPS定位模块、地面应答器等模拟实际线路运行以及验证车载设备及线路数据。整个仿真系统采用两套速度测量系统:(1)列车速度传感器系统,为ATP提供列车的速度信息;(2)DGPS速度系统,即动态定位系统,为地面仿真平台的虚拟列车提供速度。由于地面仿真平台模拟的是实际线路(如郑西线)的列车运行情况,其速度由DGPS定位系统提供,当虚拟列车经过应答器时,把应答器数据通过GSM-R发送至实际列车的ATP,ATP将会判断此报文的合理性,这就需要两套速度系统的速度相对一致,误差必须控制在一定范围内。
本文利用地面仿真平台与地面应答器对DGPS的定位进行修正、平滑与推算,有效的减少定位误差,使得试验过程中定位结果满足列控系统的动态仿真需求。系统的结构图如图1所示。
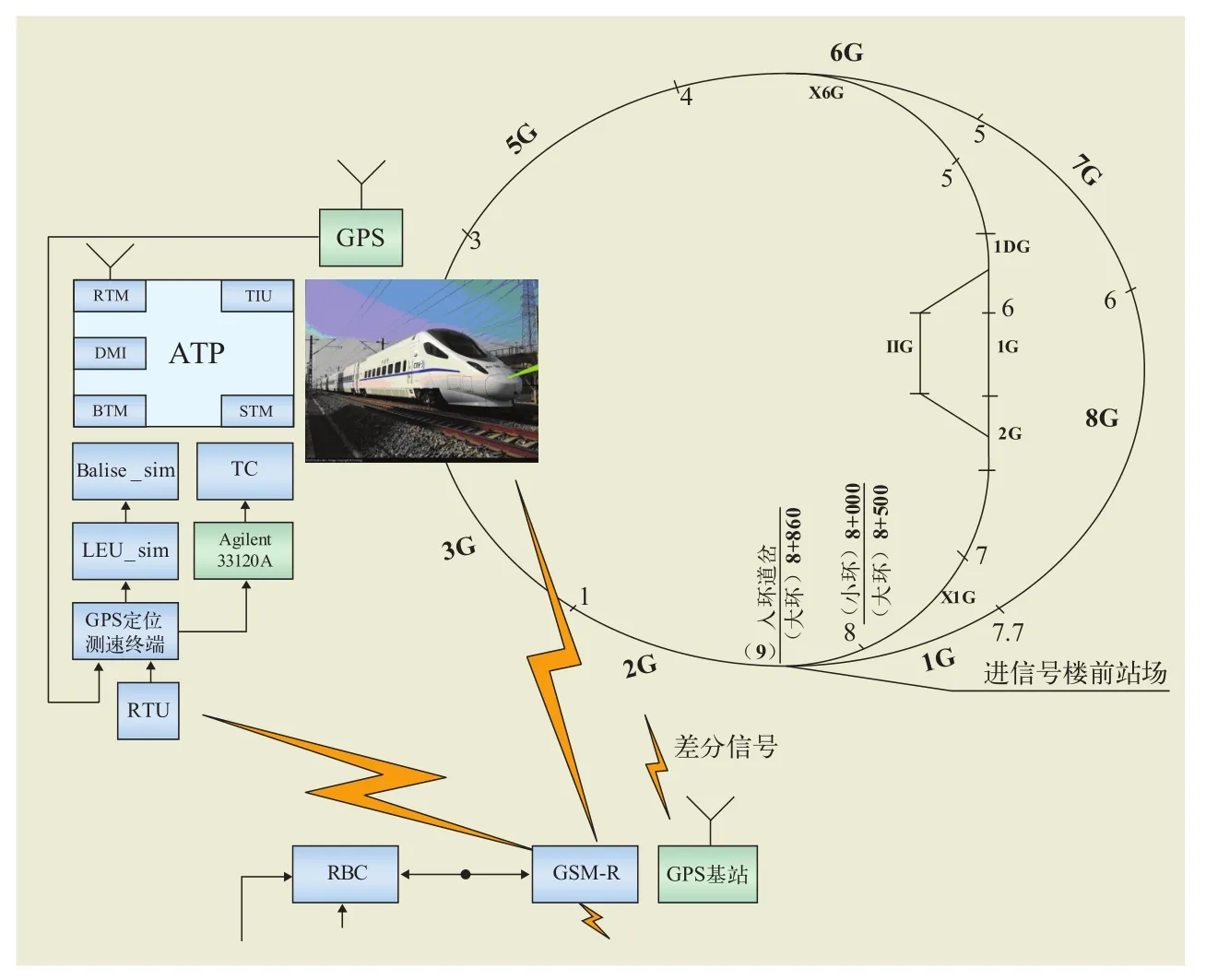
图1 系统结构图
1 GPS伪距差分定位
1.1 伪距差分定位原理
GPS伪距差分定位(DGPS)是根据伪距观测值做差解算,至少需要两套GPS卫星接收机,分别安装在运动载体和一个已知点位坐标的地面基准站上,运动载体上的称为动态GPS接收机,地面基准站上的称为基准站GPS接收机。
动态GPS接收机在测量伪距的同时,接收来自基准接收机的DGPS改正数,而改变它自己测得的伪距:
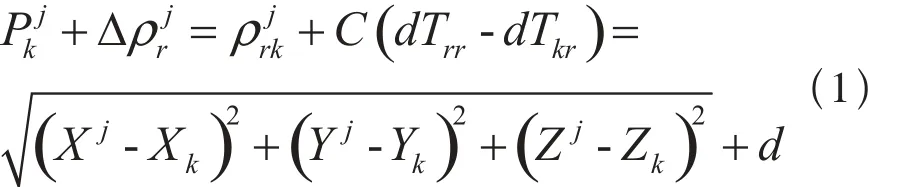

Xj、Yj、Zj_第j颗GPS卫星在时刻t的位置;Xk、Yk、Zk_GPS信号接收天线在时刻t的三维位置;t时刻动态GPS接收机测得的运动载体至第j颗GPS卫星的伪距;t时刻运动载体至第j颗GPS卫星的实际距离;dTrr_基准GPS接收机时钟与GPS时系的时间偏差;dTkr_动态GPS接收机时钟与GPS时系的时间偏差;基准站发送的DGPS改正数。可见,需要至少观测4颗GPS卫星后才可列出4个如公式(1)的方程式,对其进行线性化求解,则知动态用户在时元t的三维位置。
1.2 伪距差分的精度误差
伪距差分GPS技术能显著提高列车定位精度,其精度误差(m)如表1所示。
2动态定位系统设计
2.1 定位系统硬件实现
基于DGPS的定位系统安装于实际线路的列车上,可以分为4个部分,其结构如图2所示。
(1)主处理器模块。主处理器模块采用AT91SAM9260工业级ARM9处理器,主处理器模块实现对定位信息及应答器报文信息的处理。
(2)定位模块。定位模块包括动态GPS接收机OEMV-1与基准GPS接收机OEMV-1。OEMV-1定位模块在DGPS下,定位精度为0.45 RMS,位置数据更新率为20 Hz(可选50 Hz),具备一个可控的PPS输出和标记脉冲输入。

表1 伪距定位与DGPS测量的精度误差

图2 基于DGPS的定位系统结构图
(3)数据存储模块。数据存储模块用于存储GPS接收机发出的定位信息,也可以记录定位系统与其它系统之间的数据和日志。
(4)通信模块。通信模块完成系统中各模块间的通信,即定位系统与RTU之间、定位系统与应答器报文处理模块之间的通信。其中与RTU之间的通信为双向通信:一方面RTU将地面仿真平台的应答器数据发送至定位系统;另一方面RTU将定位系统的定位信息发送至地面仿真平台。
(5)应答器报文处理模块。应答器报文处理模块完成应答器报文的解析、处理及与ATP的通信。
2.2 定位系统软件实现
定位系统的软件实现包括:(1)定位信息的采集,且将定位信息组帧为规定的格式发送至RTU,信息发送间隔为250 ms;(2)接收应答器报文,且将报文组帧为规定的格式发送至LEU,信息发送方式为触发式;(3)当列车经过应答器时,利用应答器定位,更新纠正里程信息。软件结构如图3所示。

图3 软件结构框图
由于定位信息的产生本身有一定的时间间隔,再加上经过GSM-R的传输,有一定的延时,如果地面仿真平台不对定位信息进行平滑处理,会导致虚拟列车里程的跳变,如遇到应答器跳变大于5 m,虚拟列车直接跳过应答器,将导致车载ATP丢失应答器报文。
图3中平滑里程信息(1)的算法如图4所示。
图4中Mileage_GPS为解算DGPS定位系统发送的经纬度信息得到的里程值,此值为里程平滑算法的输入;Mileage_Estimate为地面仿真平台平滑后的里程值,为平滑算法的输出;最高行驶速度视线路情况而定;定位信息间隔为250 ms;Delta_speed为列车从速度0最大加速至线路最高速度的速度变化在250 ms内的变化率;Speed_estimate为速度估计值,利用此值计算里程估计值。
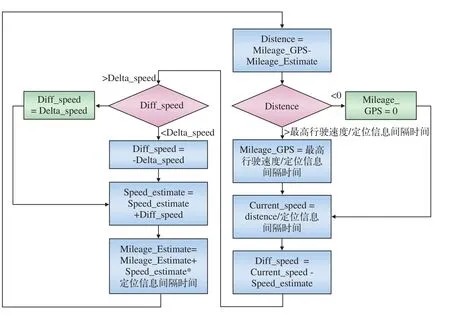
图4 里程平滑算法流程图
3 动态仿真过程
3.1 仿真设置
动态仿真采用实车加地面的仿真方式,动态GPS接收机安装在动车上,基准GPS接收机安装在轨道边的信号楼顶。仿真步骤如下(以仿真测试序列1为例):
(1)地面仿真平台创建仿真列车,模拟郑西线路,如图5所示。
a.巩义南站办理发车进路,洛阳南站办理接车进路;b.仿真线路长度为51 km;c.最高允许运行速度80 km/h;d.地面仿真平台通过GSM-R无线网与车载GPS动态接收机建立连接。
(2)试验列车:ATP上电,进入C3目视模式,启动列车。
(3)应答器数据与轨道电路数据通过GSM-R发送至车载ATP设备,列车位置信息由GPS接收机通过GSM-R发送至地面仿真平台。
(4)列车DMI显示C3目视模式转为C3完全模式,最后停车转为待机模式。
3.2 误差分析及仿真结果
3.2.1 误差分析
DGPS测量主要误差为:接收机噪声误差、多路径效应误差、相对论效应误差与地球自转效应误差。误差的有关分析可以参考文献[7]。
动态GPS接收机在测量伪距的同时,接收来自基准接收机的DGPS改正数,而改变它自己测得的伪距:

图5 模拟郑西线路图
比较式(1)和式(2),采用DGPS测量,消弱了GPS卫星时钟偏差、电离层时延、对流层时延引起的距离误差,当动态GPS接收机与基准站距离在100 km以内时,可以认为:

由于当真实列车经过地面应答器时,通过接收应答器报文来实现定位里程的纠正,应答器定位的最大误差[6]为:

在试验过程中发现组合定位的最大误差为3 m左右,由于应答器组的组内间距为5 m,此定位误差不会影响应答器报文的发送,此外当列车接收到新的应答器数据,会将DGPS误差及时修正。
3.2.2 仿真结果
动态试验过程中,通过比较地面仿真平台虚拟列车位置与实际列车的位置,可以得出系统总误差的大小,如图6所示,上面的虚线为未采用平滑算法,实线为经过地面仿真平台平滑后的误差大小。可见采用平滑算法能有效的减少系统误差。图7为定位系统提供的里程数据误差与经过平滑后的误差,从图中可以看出,经过平滑后,误差显著减小。
在列控系统仿真过程中,伪距差分的定位技术如不遇到信号的遮挡,可以满足列控系统定位的需求,在信号被遮挡时,采用地面仿真平台平滑算法,系统能在一定误差范围内连续稳定工作。如DGPS信号被遮挡发生在图6中5 km位置处,在定位信号被遮挡这段时间内,采用地面仿真平台单独推算列车位置,直到DGPS信号恢复。ATP在此误差范围内能持续接收应答器报文,并由目视模式转换为完全模式。
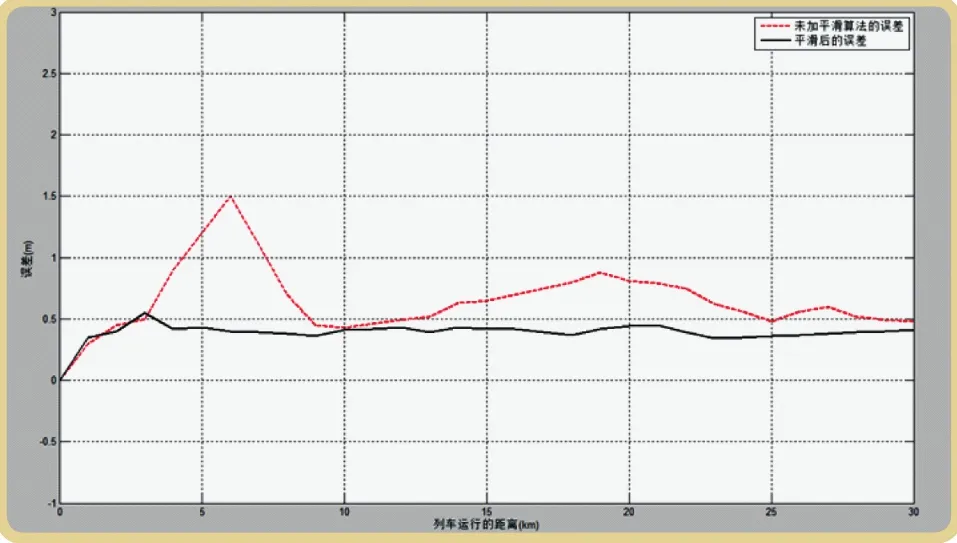
图6 列控系统动态仿真过程总误差

图7 DGPS定位里程误差及估计修正后的误差
4 结束语
本文研究了一种基于DGPS、应答器定位与地面仿真平台推算的组合导航系统,通过试验证明,该系统克服了伪距差分定位的缺点,在定位的准确度与系统可靠性方面较单一的伪距差分定位有着显著的改善。
[1] 王 军,于洪喜,曹桂兴.差分GPS定位技术[J].空间电子技术,2001(Z1):107-110.
[2] 朱爱红,李 博,杨 亮.高速列车定位技术与组合定位系统研究[J].中国铁路,2013(5):59-63.
[3] 刘 江,蔡伯根,唐 涛,等.基于GPS与惯性测量单元的列车组合定位系统[J].中国铁道科学,2010,31(1):124-128.
[4] 殷 琴,蔡伯根,王 剑,等.GPS/ODO列车组合定位系统[J].现代电子技术,2010(19):168-171.
[5] Wei ShangGuan, Bai-gen Cai, Jian Wang.Research of Train Control System Special Database and Position Matching Algorithm[J].IEEE,2009(IV).
[6] ERTMS. Unisig Subset-036 FFFIS for Eurobalise[EB/OL]. 2010-01-01.
[7] 康四林,李语强.GPS定位中的误差分析[J].天文研究与技术,2010,7(3):224-229.
责任编辑 陈 蓉
Integrated Positioning System based on DGPS
LIU Jia1, YANG Zhijie2
( 1.China Academy of Railway Sciences, Beijing 100081, China; 2.Signal&Communication Research Institute, China Academy of Railway Sciences, Beijing 100081, China )
This paper described an integrated technology based on DGPS, CTCS-3 simulation platform and balise positioning, through the integrated positioning technology to improve the positioning accuracy of DGPS, and proposed the Mileage Smoothing Algorithm to improve DGPS applications under adverse environmental conditions. The fi eld test demonstrated that the Integrated Train Positioning System could improve the accuracy of position, continuity and reliability.
DGPS pseudo-range positioning; positioning error; simulation platform; Mileage Smoothing Algorithm
U285∶TP39
A
1005-8451(2014)07-0001-05
2014-01-09
刘 佳,在读硕士研究生;杨志杰,研究员。