警用水下机器人本体的设计
2014-11-26金碧霞
□ 金碧霞
中国船舶重工集团 第七一○研究所 湖北宜昌 443003
警用水下机器人本体是由中国船舶重工集团公司第七一O研究所于2010年针对 “广州市公安局水底搜索扫描机器人系统采购项目”而研发的,主要用于水下刑事证物的探测识别、涉案水下现场搜索调查,并承担广州亚运会期间的水下重点区域安保防护任务。根据系统要求,警用水下机器人本体应具有以下功能。
(1) 具有前进/后退、左转/右转、上浮/下潜机动能力。
(2)具有水下目标搜索、探测和识别能力。
(3)具有深度检测、显示及自动深度保持功能。
(4)具有航向检测、显示及自动航向保持功能。
(5)有一定的水下证物定位打捞能力。
1 方案制定及工作原理
没有一种能完成所有任务的全功能机器人,所以要依据其任务使命和工作环境制定机器人的总体方案[1]。警用机器人水下平台根据作业要求搭载有声纳、水下电视、机械手,具有对水下目标的声纳探测、光学识别能力和小型物件的打捞能力。装备有与控制相关的深度计、磁罗经等传感器和计算机,可实现其在水下的自主定深定向航向。其推进装置采用4个导管螺旋桨推进器,2个主推进器用于水下机器人前后直航和左右机动,2个用于上浮、下潜和悬停。根据工作要求及推进器布置,机器人可实现在水中的前后、浮潜和左右转弯运动。采用“水面GPS+水声跟踪定位系统”的超短基线定位方式,可将警用水下机器人导向目标处。
警用水下机器人本体主要由机械本体、动力推进器、水下控制单元、水下作业系统、定位系统等组成。
2 技术方案分析
2.1 机械本体结构设计
2.1.1 机器人类型确定
水下机器人按控制方式一般分为自治式水下机器人(AUV)和遥控式水下机器人(ROV)。AUV的优点在于其摆脱了电缆的束缚,活动范围不受限制,但其水下的续航力及所携带仪器的数量和复杂度大大受制于载体上能源容量的大小。ROV的优点在于动力充足,信息和数据的传递和交换快捷方便,数据量大。通过人机交互的方式来遥控ROV本体,因而其总体决策能力和水平往往高于AUV。
由于警用水下机器人的作业使命需要长时间地进行探测、观察和识别工作,且声纳等探测传感器设备与水面处理机有很大的数据传输与处理,故将警用水下机器人设计成ROV的型式。
2.1.2 机器人形体确定
水下机器人在水中航行时,不可避免地会受到水体黏性阻力的影响,不利于水下机器人运行速度的提高和灵活运转,所以减小阻力是设计中的一个主要关键点。为减小阻力,降低功耗,外形结构设计上利用仿生学原理,仿造鱼类的梭形鱼体,将警用水下机器人外形加工为旋转体,以减小水下机器人水下运行时的阻力,从而减小动力消耗[1]。警用水下机器人由头部半球形迎流段、舯部圆柱段、艉部圆锥形去流段组成回转体流线型结构。头部及艉部为非水密部分,采用玻璃钢材质。舯部圆柱段设计为耐压壳体,为水下机器人提供航行浮力及电子功能设备的密闭安装空间,采用玻璃钢材料制作的薄壁壳板加铝合金环肋的结构形式。为增加机器人在水中运行的平稳性,在机器人艉部布置了3个稳定翼板并呈倒“Y”形。机器人下方设计有底座,可保护机械本体不撞碰损坏。底座上还能安装各种仪器设备,最大限度地适应各种水下作业。

▲图1 总体布置设计流程
2.1.3 总体布置制定
水下机器人的总体布置对其使用性能是非常重要的因素,其质量的优劣直接影响到水下机器人的总体性能和使用。进行总体布置时,要采用合理的空间布置与质量分布,使水下机器人的浮心位于质心的正上方,从而保证机器人在水中的平衡和良好的机动能力。按图1总体布置设计流程来进行总体布置。
经反复计算修正,得到图2所示警用水下机器人外形示意图,其中探测识别组件(水下电视、水下摄像机)布置在机器人的头部。推进装置布置在水下机器人舯部两侧:辅助推进器以一定角度倾斜布置在水下机器人浮心前方附近,主推进器沿水平方向布置于水下机器人后半部分。
2.2 控制系统方案制定
警用水下机器人的控制系统采用分布式控制系统[2],由水上和水下两个节点组成,水下节点采用Intelx86或其兼容CPU体系结构,在其上运行WindowXP操作系统。另外,水下节点还采用PC104总线计算机,其上运行VxWorks嵌入式操作系统以实现系统实时性,遥控操作性。水下节点挂接磁罗经、深度计、漏水检测等传感器。图3为警用水下机器人的底层控制硬件框图。

▲图3 警用水下机器人的底层控制硬件框图
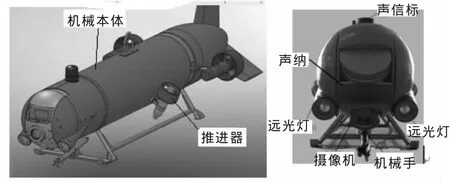
▲图2 警用水下机器人外形示意图
当警用水下机器人确定向某一航向定向航行时,如偏离了航向,则磁罗经将偏航信号传递给计算机,控制计算机根据偏航数值,向主推进器发出修正航向的命令,控制警用水下机器人自主保持航向航行。深度计实时地将机器人自身的深度信号反馈给控制计算机,控制计算机根据深度差值向辅推进器发出浮潜命令,从而实现机器人的定深航行。
2.3 定位系统方案制定
由水声跟踪定位系统、方位传感器、卫星定位(GPS)接受机等组成的超短基线定位系统,能为警用水下机器人运动控制提供必要的位置信息(包括速度、高度、下潜深度、航向角等)。定位系统组成示意如图4所示。
2.4 水下作业系统
警用水下机器人要完成探测、识别和打捞作业,就要配备有水下电视、声纳和作业机械手等传感器。
(1)水下电视包括摄像机和照明灯。
摄像机用于对目标的观察和识别。选用三洋彩色一体化摄像机模块,其型号为VCC-MD610PC,性能为:摄像管类型:(1/4)″interline transfer CCD;解析度:540 TVlines;信噪比:大于 50 dB;光学镜头:30x光学变焦;制式:PAL。
照明灯选用卤钨杯灯,每个35W,电压12V,视场角 36°。

▲图4 警用水下机器人的定位系统原理框图
(2)前视声纳选用加拿大IMAGENEX公司的837型多波束声纳,其性能指标如下:
① 频率:260 kHz。
② 换能器波束宽度。 接受 :120°(水平方向)×20°(垂直方向);发射: 120°(水平方向)×20°(垂直方向)。
③ 有效水平波束宽度:3°,1.5°,0.75°。
④ 分辨率:0.2%。
⑤ 最小检测范围:0.5 m。
⑥ 图像更新率:可达20 fps。
(3)机械手选用美国SeaBotix Inc公司的TJG300型,其主要性能为夹持力:6.5 kgf;最大开口直径:40 mm。
3 试验
2010年7月在珠江进行了警用水下机器人交付验收试验,试验过程是将模拟目标用浮标吊挂在水下约5~10m处,并置于开阔水域中。在定位系统的导航下,操纵警用水下机器人本体驶向目标区域,在距目标2~5m处,打开照明灯并利用水下电视对目标进行观察,并操控机械手对目标进行夹持作业。试验结果表明警用机器人本体能正常完成作业使命,同时,在自动航向保持、自动深度保持和机动性控制上都取得了令人满意的结果,完全能满足进行作业使命的运动控制要求。
[1] 徐玉如 ,李彭超 .水下机器人发展趋势 [J].自然杂志,2011(3):125-132.
[2] 孙玉山,甘永,王丽荣,等.基于VxWorks的水下机器人控制器的设计[J].南开大学学报(自然科学版),2005,38(增刊):174-177.
[3] 蒋新松.水下机器人[M].沈阳:辽宁科学技术出版社,2000.
