基于频率自适应谐振控制器的静止无功发生器电流控制
2014-11-25陈国柱
杨 昆 谢 川 陈国柱
(浙江大学电气工程学院 杭州 310027)
1 引言
配电网中电弧炉、轧钢机、分布式发电、电气化铁路等大容量无功负荷的运行,不仅增加线路损耗,降低电能利用率,而且会产生低次谐波,造成电网不对称,严重影响用户设备正常、安全运行[1-3]。SVG 是一种性能理想的动态无功补偿装置,具有调节速度快、适用范围更宽,输出无功电流谐波小,装置结构紧凑、体积小、成本低等优点,通过控制算法设计,可以提高装置在电网谐波扰动情况下的运行性能,并使装置具有低次谐波补偿能力,适合进行配电网电能质量问题的综合治理[4-6]。
SVG 的本质是并网逆变器,通过控制交流侧输出电压产生精确跟踪指令的补偿电流,消除电网无功和谐波。传统的PI 控制器,理论上只能实现直流信号的无静差跟踪,在同步旋转坐标系下可以精确跟踪无功,但是为了保证系统稳定和鲁棒性,不能任意提高控制器带宽,因此无法兼顾谐波抑制和补偿能力。基于内模原理的谐振控制器在谐振频率点处提供产生无穷大增益,可以实现对该频率周期指令(或扰动)信号的无静差跟踪(或抑制),通过不同谐振频率的RC 并联,实现对补偿带宽范围内各次谐波的跟踪或抑制,近年来在APF、SVG、风力及光伏发电等并网变流器的输出电流波形控制技术广泛应用,并且针对谐振控制器对模拟系统元器、负载和电网频率等参数波动的敏感性,提出了准谐振控制器、改进型谐振控制器等控制方法,并利用先进控制和数值计算等方法优化控制器参数设计,取得了丰富成果[7-11]。
电力系统正常运行条件下存在±0.2Hz~±0.5Hz的频率偏差[12],基波频率偏差会在谐波频率点成倍增加,理想谐振控制器在谐振点带宽窄,当电网频率发生偏移时,控制器谐振增益骤降,跟踪精度降低,并且数字控制离散化引起的开环增益下降和相位滞后会进一步降低控制器跟踪精度和稳定性。工业现场广泛应用准谐振控制器,以牺牲控制器精度和响应速度为代价,提高控制器鲁棒性,但是无法根本解决,还有一些文献提出根据电网频率在线调整控制器参数,但是实时性不高[7,13-14]。
本文提出基于频率自适应谐振控制器的 SVG补偿电流控制策略,以提高装置补偿性能、增强谐波抑制能力、拓宽补偿范围。通过分析谐振控制器的作用机理在离散域进行控制器设计,避免离散化引起的控制器性能偏差,并通过一种基波采样点数固定数字锁相环[15],保证控制器实时跟踪电网频率变化,提高控制器的频率适应能力。实验结果证明了本文设计方法的实用性和有效性。
2 SVG 系统模型及原理
应用于三相或单相电网的各种SVG 拓扑结构都可以等效为图1 所示的单相等效电路分析,其中VSI 为电压源逆变器;Lc为滤波电感,Rc是其等效电阻,逆变器和线路损耗也折算在Rc中;Cdc为直流侧支撑电容,为无功能量交换和谐波电流抑制提供电压支撑;us、uc分别为电网电压和逆变器输出电压,ic为装置输出电流。

图1 SVG 单相等效电路Fig.1 Single-phase equivalent circuit of SVG
根据单相等效电路,写出交流侧回路方程,可得

将上式进行拉普拉斯变换,整理可得SVG 在频域的数学模型为

由上式可知,通过控制装置输出电压的幅值和相位,可以产生满足要求的补偿电流。通常对SVG在三相、两相静止或旋转坐标系下进行建模,经过简化、前馈和解耦等处理后,电流控制环都具有形如式(2)的形式,因此以该模型为基础的电流控制分析具有通用性。
3 频率自适应谐振控制器设计
3.1 控制器原理
将被控对象视为VSI 输出电压Uc到输出电流Ic的传递函数G(s),系统电流环控制原理如图2 所示,其中,控制环输入为根据负载计算或开环给定的指令电流,输出为装置电流,GPR(s)为控制器传递函数,本文中为比例和谐振控制器组成的PR 控制器,K为VSI 等效的比例环节,它是直流电压和开关信号的函数,将控制器输出调制信号Ug转换为实际的交流侧输出电压。电网电压作为叠加在装置输出端的扰动项D(s)进行分析,可以评估控制环对电网电压扰动的抵抗能力。

图2 SVG 电流环控制原理Fig.2 Principle of current loop control of SVG
内模原理指出控制器精确跟踪任意参考输入信号的前提条件,是闭环控制系统稳定且包含有输入信号保持器[16],因此对于角频率为ωn正弦信号,如下形式的RC
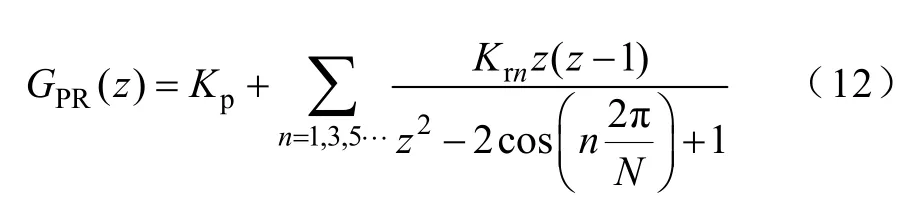
可以实现对该信号的无静差跟踪。在三相三线电网中,任意满足狄里赫利条件的电流信号可以通过傅里叶变换分解为基波和 6h±1(h=1,2,3···)次谐波的线性叠加,三相四线和单相电网中还存在3h次谐波,根据内模原理,若设计PR 控制器形式如下:

即比例控制器和多个谐振频率的RC 叠加,则可以实现基波和特定次谐波电流指令的无静差跟踪。从经典控制原理角度理解,图2 所示的控制框图中,系统跟踪误差为

在频率ωn处当s→jωn时,有|GPR(s)|→∞,对于有限输入的交流指令信号Iref,控制器在该频率点的跟踪误差E(jωn)=0,实现指令信号的无静差跟踪,内模的作用类似无穷大增益的控制信号保持器,当误差衰减到零时,它仍能维持适当的控制作用。
同理,控制器在电网扰动作用下的输出为

对于有限输入的电网谐波电压扰动,在控制器谐振频率点处有Cd(jωn)=0,控制器可以完全抵消补偿带宽范围内电网电压谐波畸变的影响,提高了单相SVG 抗扰动能力。
3.2 数字PR 控制器设计
通过数字信号处理(DSP)芯片实现控制器功能,考虑数字控制对系统性能和稳定性的影响,直接在离散域进行控制器设计。
通过上节分析可知,控制系统实现无静差跟踪交流信号的本质,是RC 在谐振频率产生无穷大增益,而谐振点与控制器传递函数极点相同,因此只要保留原有极点,就不会改变跟踪性能。在式(3)中,传递函数极点为s1n,2n=±jωn,其中谐振角频率ωn=nω0,ω0为基波角频率,n为谐波次数,令s1n,2n为数字控制器极点,将其映射到z域有z1n,2n=e±jωnTs,Ts为采样周期,则数字RC 的分母表达式为

经过采样离散的被控对象z域表达式为

通常系统采样频率在10kHz 以上,因此被控对象极点可以近似为zs=1,配置zs为控制器零点,以抵消被控对象极点,发挥谐振极点的主导作用。数字控制引入延时对系统的影响,可以等效为控制环前向通路的一拍滞后z-1,为了减小延时对系统性能影响,设置超前环节进行相位补偿,最终数字PR控制器表达式为

比例系数Kp和谐振增益Krn的设计,需要综合考虑控制系统的跟踪精度,动态性能和闭环稳定性。令n=1,Krn=constant,变化Kp,系统开环频率特性如图3 所示,可以看出控制器在谐振频率点有很高的开环增益,并且随Kp增加而增加,这有利于减小系统稳态跟踪误差,加快响应速度;但是Kp越大,相位裕度变小,再考虑线路参数和建模误差等影响,容易产生振荡,不利于闭环系统的稳定。

图3 Kp变化时系统开环频率特性Fig.3 Frequency characteristic of open-loop when Kpvaried
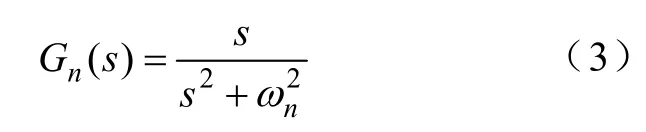
同理,若令n=1,Kp=constant,Krn变化,系统开环频率特性如图4 所示,类似可知随Krn增大,系统开环增益增加,跟踪精度提高,但是相位裕度减小,闭环系统超调量增加,稳定性降低。
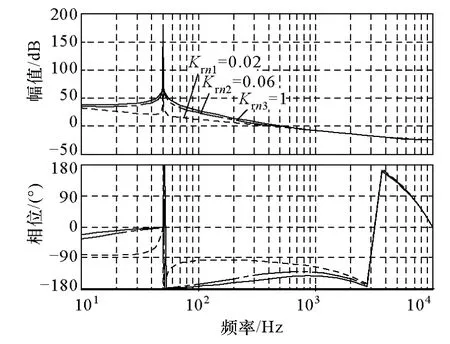
图4 Krn 变化时系统开环频率特性Fig.4 Frequency characteristic of open-loop when Krn varied
根据上述分析,折中考虑参数设计,可以最终确定数字PR 控制器表达式,将其写成差分方程的形式,可以很容易通过DSP 芯片实现控制器设计。
以包含基波和3、5、7 次谐波补偿的PR 控制器为例,与传统PI 比较,在两种控制器下电流环闭环传递函数频率特性如图5 所示,可以看出PI 控制器在各次谐波频率点均存在较大的幅值衰减和相位滞后,指令跟踪精度和谐波抑制能力不佳,而PR控制在谐振频率点产生谐振峰,可以实现零幅值衰减和零相位滞后无静差跟踪。
图5 电流环闭环频率特性Fig.5 Frequency characteristic of current loop
3.3 数字RC 频率自适应策略
通过上述分析可知,PR 控制器在RC 谐振频率点产生很大的开环增益,实现对该频率信号的无静差跟踪,开环增益越大,跟踪精度越高。由于RC谐振峰带宽很窄,当电网频率发生偏移时,控制器开环增益急剧下降,失去了对谐波信号的跟踪能力。准谐振控制器虽然可以通过减缓谐振峰减小影响,但是会降低跟踪精度。因此为了在电网频率偏移时保持控制器性能,需要根据电网实际频率实时调整RC 谐振频率点,使其跟踪实际的谐波频率。
文献[16]提出了一种固定基波周期采样点数,实时调节控制器采样周期,来跟踪电网频率变化的数字锁相环,采样周期满足

式中,T0为电网基波周期,N为一个基波周期内的采样点数。基波角频率和周期关系为

将式(6)、式(7)代入式(5)可得
以6 次谐波为例,当电网频率偏移±0.5Hz,RC的频率响应特性曲线如图6 所示,可以看出由于锁相环输出基波周期始终跟踪电网频率变化,RC 谐振点将始终在6 次谐波位置,实现谐振频率自适应。

图6 电网频率偏移±0.5 Hz 时RC 频率响应特性曲线Fig.6 Frequency characteristic of RC when ±0.5Hz offset occurred to grid
4 实验验证
搭建一台三相四线380V/16.5kW 的SVG 实验样机,验证控制器在电网中的实际运行性能,样机开关频率7kHz,控制算法通过TMS320F2812 实现。
4.1 稳态无功补偿
开环给定补偿指令,分别在PI 和本文设计的PR 控制器下令装置输出21.2A 感性无功电流,比较装置的补偿性能,其中PR 控制器设计RC 补偿基波和25 次以内谐波。A 相电网电压及装置输出电流波形如图7 所示,输出电流FFT 分析及基波跟踪误差如图8 所示。
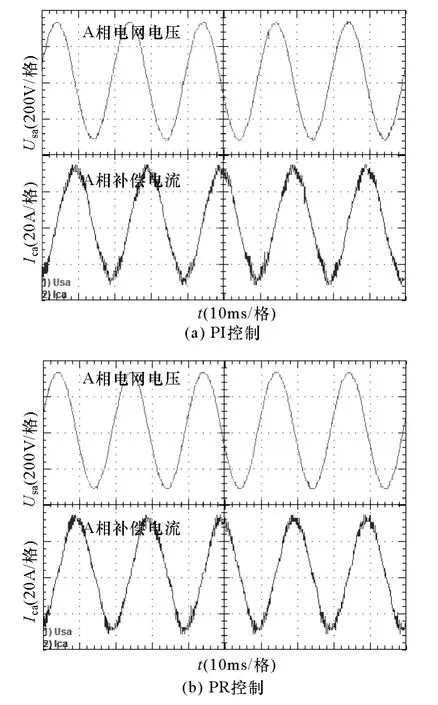
图7 无功补偿实验波形Fig.7 Experimental waveforms of reactive power compensation

图8 补偿电流FFT 分析Fig.8 FFT analysis of compensation current
通过实验波形和频谱分析结果可以看出:由于PI 控制器不能无静差跟踪交流信号,因此装置输出基波电流与给定指令存在较大误差,并且由于电网电压畸变和控制器补偿带宽限制,输出电流含有较高3 次和5 次谐波;而在PR 控制下,由于基波、3次和5 次RC 的调节作用,装置输出基波电流跟踪精度提高,电网畸变时的谐波抑制能力增强,3 次和5 次谐波畸变率不超过1%。
此外,根据图5 闭环特性可知,PI 和PR 控制器在基波频率点的的相位滞后均小于1°,而装置输出电流中除无功外还包含一定有功分量,用来弥补装置等效内阻抗的损耗,因此两种控制方法下装置输出电流滞后电网电压90°左右,差别不大,并且有功电流会对装置无功跟踪精度产生一定影响。
进行指令切换实验,进一步验证样机动态性能。令无功电流指令从感性7A 切换到容性21.2A,捕捉动态过程波形如图9 所示。由实验波形可知,装置在10ms 内完成了动态调节过程,并且输出电流切换过程没有产生过冲振荡,证明了本文设计方法良好的动态性能。
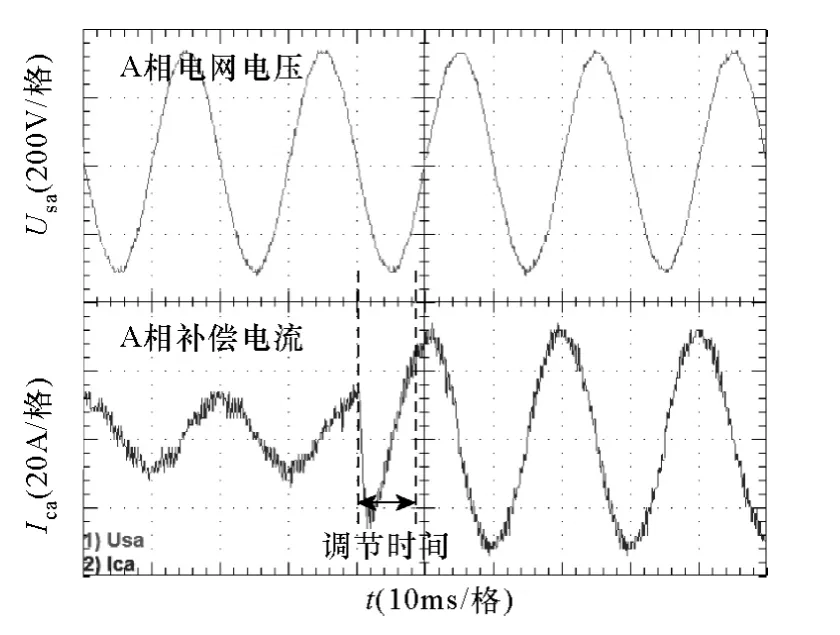
图9 无功补偿动态实验波形Fig.9 Dynamic experimental waveforms of reactive power compensation
4.2 谐波补偿
用三相不控整流桥挂纯电阻作为谐波负载,验证样机的谐波补偿性能。负载电流、补偿电流和补偿后电网电流波形如图10 所示,其中负载电流有效值约为70A,总畸变率28%,通过PR 控制,装置补偿后电网电流畸变率下降3.2%,到可以看到本文提出的控制策略可以有效补偿谐波负载,拓展了SVG 应用带宽。
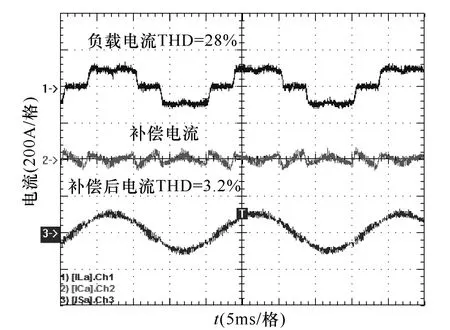
图10 谐波补偿实验波形Fig.10 Experimental waveforms of harmonic compensation
4.3 电网频率自适应
用Chroma 可编程交流电源供应器模拟电网,在电网电压40V、频率49.5Hz 条件下,分别在有/无自适应策略PR 控制器下检验SVG 谐波补偿能力,补偿后电网电流和补偿电流波形如图11 所示。可以看出,没有频率自适应控制策略的PR 控制器由于谐振频率点和谐波频率偏移,失去了对谐波的控制能力,而有频率自适应策略的PR 控制器能够跟踪电网频率的变化,保证对谐波的补偿能力。
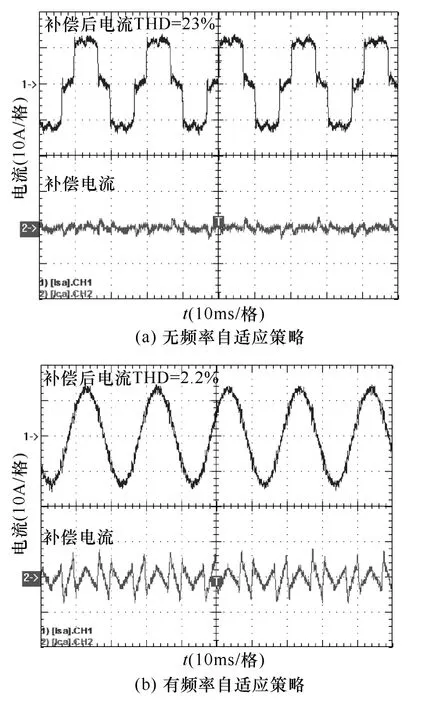
图11 电网频率自适应实验波形Fig.11 Frequency adaptive experimental waveforms
5 结论
为了提高SVG 补偿性能、增强谐波抑制能力、拓宽补偿带宽,并提高装置在电网频率波动情况下的适应能力,提出了一种基于频率自适应RC 的补偿电流PR 控制策略。实验结果表明,由于RC 无穷大开环增益的引入,保证了SVG 对基波和谐波电流的高跟踪精度,提高了装置谐波抑制和补偿能力,拓展了应用带宽;频率自适应策略的引入,使控制器谐振峰在电网频率变化情况下能实时跟踪谐波频率变化,提高了装置的频率适应性,证明了控制策略的可行性。
[1]朱桂萍,王树民.电能质量控制技术综述[J].电力系统自动化,2002,26(19):28-31.Zhu Guiping,Wang Shumin.A survey on power quality control technology[J].Automation of Electric Power System,2002,26(19):28-31.
[2]刘小河,赵刚,于娟娟.电弧炉非线性特性对供电网影响的仿真研究[J].中国电机工程学报,2004,24(6):30-34.Liu Xiaohe,Zhao Gang,Yu Juanjuan.Simulations on the impaction in power supply network caused by the nonlinear characteristics of electric arc furnace system[J].Proceedings of the CSEE,2004,24(6):30-34.
[3]杨昆,陈磊,陈国柱.DSTATCOM 补偿不平衡负载分序控制策略[J].电力自动化设备,2012,32(7):36-41.Yang Kun,Chen Lei,Chen Guozhu.Individual sequence control of DSTATCOM compensation for unbalanced load[J].Electric Power Automation Equipment,2012,32(7):36-41.
[4]Yang Kun,Cheng Xiaoxiao,Wang Yue,et al.PCC voltage stabilization by D-STATCOM with direct grid voltage control strategy[C].Proceedings of IEEE International Symposium on Industrial Electronics,Hangzhou,China,2012.
[5]袁佳歆,陈柏超,万黎,等.利用配电网静止无功补偿器改善配电网电能质量的方法[J].电网技术,2004,28(19):81-84.Yuan Jiaxin,Chen Baichao,Wan Li,et al.The method to improve power quality of distribution system by distribution static compensator[J].Power System Technology,2004,28(19):81-84.
[6]杨昆,陈磊,陈国柱.单相SVG 高性能补偿电流控制技术[J].浙江大学学报(工学版),2013,47(2):339-344.Yang Kun,Chen Lei,Chen Guozhu.High performance compensation current control strategy of single-phase SVG[J].Journal of Zhejiang University (Engineering Science),2013,47(2):339-344.
[7]Yang Kun,Chen Lei,Jia Yuhong,et al.Study on Proportional resonant control strategy of single-phase SVG[C]. Proceedings of IEEE International Symposium on Industrial Electronics,Hangzhou,China,2012.
[8]胡文华,马伟明,刘春喜.一种新型交流PI 调节器及其在逆变电源中的应用[J].电气传动,2010,40(1):38-42.Hu Wenhua,Ma Weiming,Liu Chunxi.Novel AC PI regulator and its applications on inverter power source[J].Electric drive,2010,40(1):38-42.
[9]Cristian Lascu,Lucian Asiminoaei,Ion Boldea,et al.Frequency response analysis of current controllers for selective harmonic compensation in active power filters[J].IEEE Transactions on Industrial Electronics,2009,56(2):337-347.
[10]Marco Liserre,Remus Teodorescu,Frede Blaabjerg.Multiple harmonics control for three-phase grid converter systems with the use of PI-RES current controller in a rotating frame[J].IEEE Transactions on Power Electronics,2006,21(3):836-841.
[11]Adrian Timbus,Marco Liserre,Remus Teodorescu,et al.Evaluation of current controllers for distributed power generation systems[J].IEEE Transactions on Power Electronics,2009,24(3):654-664.
[12]中国国家标准.电能质量 电力系统频率偏差[S].2009.
[13]杨秋霞,梁雄国,郭小强,等.准谐振控制器在有源电力滤波器中的应用[J].电工技术学报,2009,24(7):171-176.Yang Qiuxia,Liang Xiongguo,Guo Xiaoqiang,et al.Application of Quasi resonant controller for active power filter[J].Transactions of China electrotechnical society,2009,24(7):171-176.
[14]郭伟峰,徐殿国,武健,等.LCL 有源电力滤波器新型控制方法[J].中国电机工程学报,2010,30(3):42-48.Guo Weifeng,Xu Dianguo,Wu Jian,et al.Novel control method for LCL active power filter[J].Proceedings of the CSEE,2010,30(3):42-48.
[15]谢川,张靖,王智强,等.适于重复控制固定采样点数的数字锁相方法[J].浙江大学学报(工学版),2011,45(5):789-793.Xie Chuan,Zhang Jing,Wang Zhiqiang,et al.Digital PLL with fixed number of sampling points for repetitive control algorithm[J].Journal of Zhejiang University (Engineering Science),2011,45(5):789-793.
[16]Francis B,Wonham W.The internal model principle for linear multivariable regulators[J].Applied Mathematics and Optimization,1975,2(2):170-194.