三电平PWM 整流器多模型预测控制方法
2014-11-25曹晓冬谭国俊王从刚
曹晓冬 谭国俊 王从刚 李 浩
(中国矿业大学信息与电气工程学院 徐州 221008)
1 引言
三电平PWM 整流器以其输入单位功率因数、网侧电流畸变率低以及dv/dt冲击小等特点广泛应用于中、大容量的电力电子系统中。为保证PWM整流器静、动态性能,国内外学者对其控制策略进行了深入研究,主要包括:电压电流双闭环控制[1]、开关表滞环控制[2,3]以及模型预测控制[4,5]等策略。
模型预测控制(Model Predictive Control,MPC)以电力电子系统离散预测模型为基础,根据历史输出和未来输入预测系统未来输出,最后采用滚动优化的方式,结合目标函数决策即可确定最优开关状态。由于无需脉宽调制部分且无需构建离线开关表,结构简单、控制灵活且动态性能优异,得到广泛研究[4-7,13,17]。其中,文献[6,7]建立了三相PWM 整流器离散预测模型,结合变流器拓扑包含有限种开关状态的特点,给出了基于MPC 策略的三相PWM 变流器MPC 系统控制方案。但其仅包含经典预测控制理论中的模型预测、滚动优化两项,未引入反馈校正环节,属于开环预测控制。文献[8,9]指出,当模型失配或环境干扰引起模型预测值与实际系统输出存在偏差时,PWM 整流器控制性能降低。随着模型失配度和干扰进一步加重,甚至影响PWM 整流器系统的正常运行。
针对PWM 整流器因系统干扰、电抗器饱和以及温度变化等引起的模型参数失配问题,文献[10]设计了电流内环优化调节器,其在模型参数失配时通过该调节器的补偿调节功能,使系统表现出较好的鲁棒性能,但该方法对调节器参数敏感,实现较困难。文献[11]提出一种同步旋转坐标系下无电感L参数的电流解耦控制方法,该方法在电流解耦调节时无需电感L参数,但其未考虑杂散电阻变化以及系统干扰对PWM 整流器影响。
针对模型参数失配时PWM 整流器高性能控制问题,本文提出一种三电平PWM 整流器多模型预测控制方法,在传统的模型预测控制系统中引入多模型自适应反馈校正环节,在线辨识与实际系统匹配度最高的系统预测模型。文章首先分析了三电平PWM 整流器系统结构,给出了系统离散化方法和目标函数构建准则,并结合MPC 系统特点设计多模型自适应控制器;然后从提升系统寻优效率角度出发,给出了优化的多模型预测控制方法,有效地缩短了系统在线计算耗时;搭建了基于DSP+FPGA 控制的三电平PWM 整流器实验样机,并就实际数字处理系统存在的控制延时问题进行了影响分析和补偿方案。最后实验结果表明所提控制方法的可行性和优越性。
2 三电平PWM 整流器数学模型
三电平PWM 整流器主电路结构如图1 所示。其中,L为网侧滤波电抗器;R为等效电阻;RL为直流母线负载电阻;C1、C2为直流母线滤波电容。
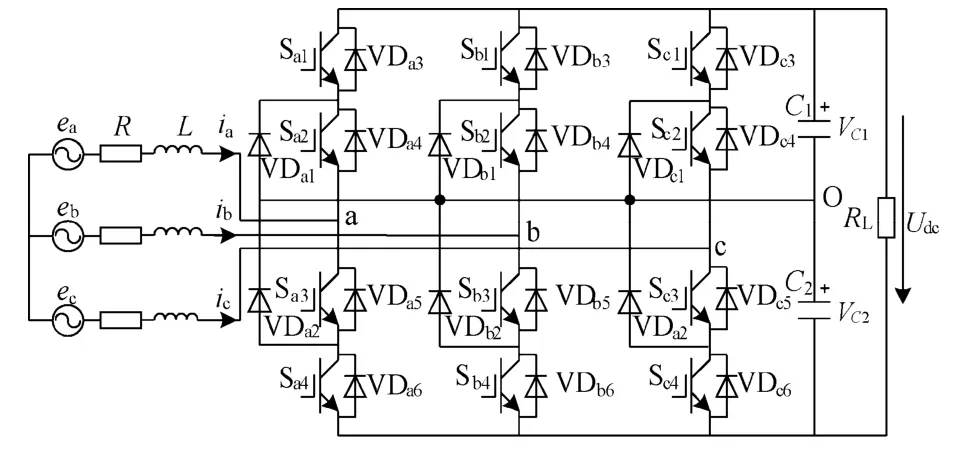
图1 三电平整流器电路拓扑结构Fig.1 The three-level rectifier circuit topology
假设三相交流电压对称,同时忽略网侧电阻、滤波电感的不对称性,则三相PWM 整流器αβ 坐标系下数学模型为[12]

式中,iα,β分别为整流器网侧电流αβ 坐标分量;eα,β分别为电网电动势αβ 坐标分量;Vα,β分别为整流器交流侧端电压αβ 坐标分量。
假设控制系统采样周期为Ts且足够小,根据前向差分原理可知式(1)中的微分项可近似表示为

将式(2)代入式(1),求得三相PWM 整流器离散预测模型为

若此时滤波电感L、网侧电阻R参数失配,设L=Ln+ΔL,R=Rn+ΔR,其中Ln、Rn表示整流器系统实际电感、电阻参数。代入式(1),可得模型参数失配时PWM 整流器数学模型为

对式(4)进行离散化处理并向前推算一拍,得模型参数失配时PWM 整流器离散数学模型为

此时若采用传统MPC 方案[13]进行PWM 整流器控制,电流预测值iα,β(k+1) 中将包含因参数失配而引起的误差项(Ts·fα,β)/Ln,进而影响模型预测控制效果。
3 多模型预测控制原理
考虑到PWM 整流器滤波电感L制作工艺存在的差异性,当大电流流过L时易造成电感饱和现象,导致电感值发生变化;此外由于开关器件的等效电阻Rl不可测量性,同时随着温度变化滤波电感等效电阻Rs也随之变化,从而造成式(3)中R=Rs+Rl的多变性,直接影响离散预测模型预测精度。为此本文提出一种可快速辨识系统L、R参数变换的多模型预测控制方法,其基本思想[14-16]为:利用预先建好的多模型集来逼近实际PWM 整流器的动态特性,再通过加权子模型的方式获得系统的全局近似模型,并将该模型作为下一采样周期的离散预测模型。整个辨识过程充分体现了模型预测控制只关注模型预测功能而不注重模型具体形式的固有特性。图2 所示为多模型预测控制原理框图,系统组成包括:模型预测控制器和多模型自适应控制器。

图2 多模型预测控制原理框图Fig.2 Block diagram of multi-model predictive control strategy
3.1 模型预测控制器
对于三电平PWM 整流器系统,其控制目标包括电流跟踪外环给定和保持中点电位平衡,考虑到三电平拓扑可提供27 种有限个电压矢量的特征,此时系统控制问题被转化为对上述电压矢量的选取方案。模型预测控制正是基于滚动优化的思想,在对上述27 种开关状态对应系统未来状态逐一预测的基础上,采用目标函数决策的方式得到最优开关状态。
式(3)给出了三电平PWM 整流器网侧电流离散预测模型,将27 种开关状态对应电压矢量逐一代入即可求得第k+1 时刻的网侧电流iα,β(k+1)。考虑到三电平拓扑存在中点电位偏移问题,为实现中点电位平衡控制亦需对其k+1 时刻值进行预测,以便设计目标函数。由图1 可知,三电平拓扑中点电位由滤波电容C1、C2两端端电压及流过其电流方向共同决定,设三电平拓扑中点电位为Vo=VC1-VC2,在两相静止αβ 坐标系下建立三电平PWM 整流器数学模型为[17]

式中,sα、sβ为三电平整流器开关状态在αβ标系下分量;C为直流滤波电容,且C=C1=C2。
同理采用式(2)的方式对式(6)进行离散化,可以得到三电平PWM 整流器第k+1 时刻中点电位预测值为

在根据式(3)、式(7)即可预测得到第k+1时刻系统状态后,需构造目标函数J来决策27个电压矢量对于系统控制的优劣性,最终使目标函数取值最小的电压矢量将被定义为最优电压矢量。本文采用归一权值法对多目标优化问题进行转化,构建目标函数J如下

式中,K1、K2为加权系数,通过对配置适当的K1、K2值可以在电流跟踪和中点电位平衡之间取得均衡;为第k+1 时刻系统给定值,可由二阶趋势外推法求得,即

3.2 多模型自适应控制器
多模型自适应控制[18]根据子模型预测输出与实际系统输出的匹配误差作为系统性能指标,并对子模型加权系数进行在线修正,即在每个采样周期起始时刻,根据性能指标大小来调整子模型对应整个模型的权重比例,最终利用多模型来逼近被控对象的动态特性。
首先根据三相PWM 整流器模型参数L、R的先验知识及其不确定性建立对应多模型集合Ω,其中各子模型结构如式(3)所示。

式中,Ω为一个以Mn为元素的多模型集合,Mn为根据整流器参数波动范围建立的系统子模型。
在三相PWM 整流器运行过程中,第k次采样时刻时根据系统第k-1 次滚动优化选出的开关状态预测其m个子模型对应系统输出为in(k),由整流器实际输出ireal(k) 可得子模型当前匹配误差为

在时域t内系统匹配误差之和为

式中,t为匹配误差滚动累计长度;α>0 为当前匹配误差的权重,β>0 为历史匹配误差的权重;遗忘因子θ(0<θ<1),其作用为降低历史信息的重要性;L为所取历史匹配误差的时域长度。en(k,t)表示子模型与实际系统匹配程度,它越小表示模型失配也越小。
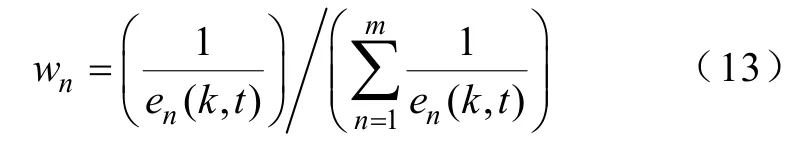
为减小模型切换产生的大的跳变,采用子模型加权获得系统最终模型。各子模型加权系数可通过性能指标归一化后得到
最后得到最优适配预测模型为

4 寻优效率优化
多模型预测控制根据整流器系统先验知识,离线建立一组固定模型集,为满足整流器多变量、参数大范围波动情况下模型高精度在线辨识,必须建立数量庞大的子模型;此外在中高压场合中为满足开关器件dv/dt、开关频率等限制,常采用多电平拓扑结构的变换器,造成预测控制中的滚动优化耗时严重。此时将多模型自适应控制与预测控制结合必将造成在线计算负担问题进一步加重,从而使数字处理系统不得不增大采样周期,影响系统控制精度。为解决上述问题,本文从提升在线寻优效率角度出发,采用优化移动子集代替系统整体模型集,以缩短模型辨识过程;此外设计无差拍控制器求得理想最优电压矢量位置后,仅需在该电压矢量附近寻优,可以有效减少MPC 滚动优化次数。
4.1 优化移动子集
假设三相PWM 整流器系统包含2个变化参数,即(L,R)T,设其预估变化区域为L∈[Lmin,Lmax]、R∈[Rmin,Rmax],分别对各个参数区间取20 采样值,则需要20×20=400个子模型。可见即使对于三相PWM 整流器这种参数变化维数不高的系统,其仍会遇到子模型数量过多的问题。为此本文设计一种在线优化移动子集方法,即利用一个移动子集代替整体模型集合,以解决高辨识精度下子模型个数过多问题,其原理图如图3 所示。

图3 在线优化移动子集方法Fig.3 Method of online optimize moving subset
每个采样时刻控制系统取一个特定的子集Z代替整个模型集合Ω,其中子集Z的元素以当前系统的模型Mpres为中心覆盖整个子集,N表示当前移动子集Z所包含元素个数,其表示形式如式(15)所示。

若系统最优模型Mopt落在子集Z内,此时采用移动子集代替整体模型集合进行系统在线辨识,辨识效果一致,获得最优模型Mopt后,将移动子集中心沿图3 箭头1 方向移动,获得系统新模型子集;若系统最优模型Mopt落在子集Z外,采用子集Z内最优模型作为新模型子集中心,将移动子集中心沿图3 箭头2 方向移动,重新构建模型子集,使整个子集向真实模型滑动靠拢。
通过在线优化移动子集在每个采样周期内选择合适的子模型集代替整个模型集,可以在不损失计算精度的情况下,有效地减少控制系统每个采样周期内的计算量。
4.2 快速MPC
随着系统电压等级升高,为满足开关器件耐压等级限制,多电平拓扑结构变流器得到广泛应用。变流器拓扑电平数的增加使其包含开关状态数显著增长(三电平为27 种,五电平为125 种等),此时若采用传统的MPC 方案需对所有开关状态在线滚动寻优,将占用实际数字处理系统大量在线计算时间,限制了模型预测控制算法拓展应用到多电平拓扑中。为解决上述问题,本文以三电平拓扑MPC 滚动优化设计为例,通过引入无差拍控制器拟在优化理想最优解附近搜寻实际MPC 系统最优开关状态。
首先忽略电力电子装置的离散特性,假设三电平PWM 整流器为理想电压源,此时系统可输出如图4 所示圆形区域内任意电压空间矢量。无差拍控制(Deadbeat Control,DBC)是一种基于数字处理系统离散特性的控制方法,其在一个采样周期结束时可使被控量达到期望值。

图4 三电平PWM 整流器输出电压矢量分布图Fig.4 Voltage vector of three level PWM rectifier
为实现无差拍电流跟踪控制,令第k时刻结束时网侧电流实际值与期望值相等,即

将式(16)代入式(3),重写式(4)可得消除电流跟踪误差最优电压空间矢量Vopt,如下

此时重新考虑电力电子装置可输出有限个离散电压空间矢量的固有特性,实际系统在任一时刻仅可输出如图4 所示的单一离散电压矢量。MPC 设计思想为采用滚动优化的方式搜寻使目标函数最优的离散电压空间矢量,此时系统设计问题被转化为对图4 中27 种离散电压空间矢量的在线寻优。传统MPC 在进行滚动寻优时并不参考任何系统先验知识,而是简单的采用遍历法对所有开关状态逐一搜索。本文所提出一种快速预测控制方法,在进行滚动寻优之前采用无差拍控制器获得系统理想最优电压矢量Vopt,此时仅需搜寻Vopt附近的离散电压矢量即可确定最终MPC 系统最优开关状态。
图5 为传统MPC 与快速MPC 在线寻优对比流程框图,其中快速MPC 在进行滚动寻优之前由式(16)求得系统最优电压矢量Vopt,根据扇区判断原理确定其所处扇区对应离散电压矢量,具体方法可采用 60°坐标系法[19]、等效两电平简化算法[20]等,此处不再赘述。将离散电压矢量存入S[N]中,N即为快速MPC 滚动寻优次数。考虑到三电平拓扑电压空间矢量分布特点,N的取值包括4、5、7 三种可能,此时滚动寻优最多仅需进行7 次,大幅提升了系统在线寻优效率,同时该方法适用于五电平等更高电平拓扑结构。
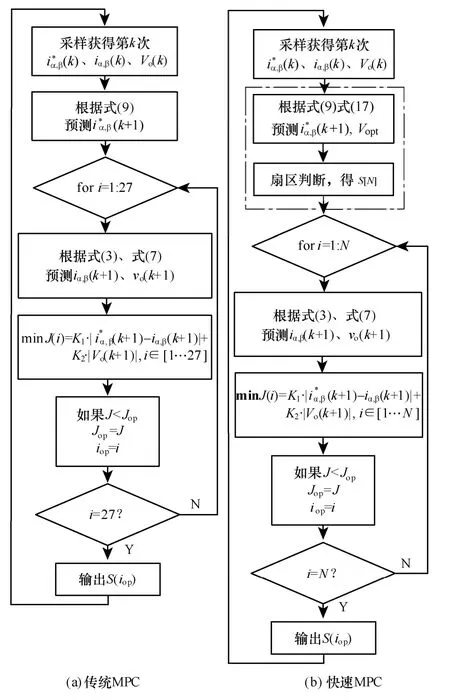
图5 两种MPC 在线寻优对比流程框图Fig.5 A compare analysis on two kinds of MPC
5 控制延时及补偿方案
理想情况下控制系统的AD 采样、算法计算、脉冲作用应在同一时刻完成,然而实际数字处理系统存在一定的计算耗时,无法保证AD 采样点与脉冲作用时刻相统一。图6a 为理想情况下MPC 工作原理,在第k时刻采样获得网侧电流i和电流给定i*,忽略计算耗时在同一时刻即可确定系统最优开关状态并将其作用于实际系统,则在第k+1 时刻网侧电流到达预测值保证了系统控制精度;图6b 为实际系统下MPC 工作原理,在第k时刻完成AD 采样,然而考虑到计算耗时影响最优开关状态需在tcal延时后才能作用于实际系统,则在第k+1 时刻网侧电流实际值与预测值存在误差Δi,进而影响系统控制精度。

图6 MPC 滚动优化原理Fig.6 The principle of MPC rolling optimization
此时需对MPC 系统脉冲作用时刻进行适当调整,以保证其与理论采样点相匹配,为此需调整MPC 算法的执行步骤,具体如下:
(1)AD 采样,获得第k时刻系统状态。
(2)作用最优开关状态(由第k-1 周期计算得到),并预测该开关状态作用下对应的第k+1 时刻系统状态。
(3)预测变流器各开关状态对应的第k+2 时刻系统状态。
(4)判断使目标函数J取值最小的对应开关状态,并将其确定为本次滚动优化得到的最优开关状态。
延时补偿策略工作原理如图7 所示。在第k时刻系统完成AD 采样、最优脉冲作用,并根据式(4)预测得到第k+1 时刻网侧电流iα,β(k+1)。随后将该电流用作系统滚动优化起始电流,此时模型预测过程被向前推算一拍为

对于中点电位的处理与网侧电流一致,在根据式(7)求得第k+1 时刻中点电位Vo(k+1)的基础上,将式(7)进一步向前推算为

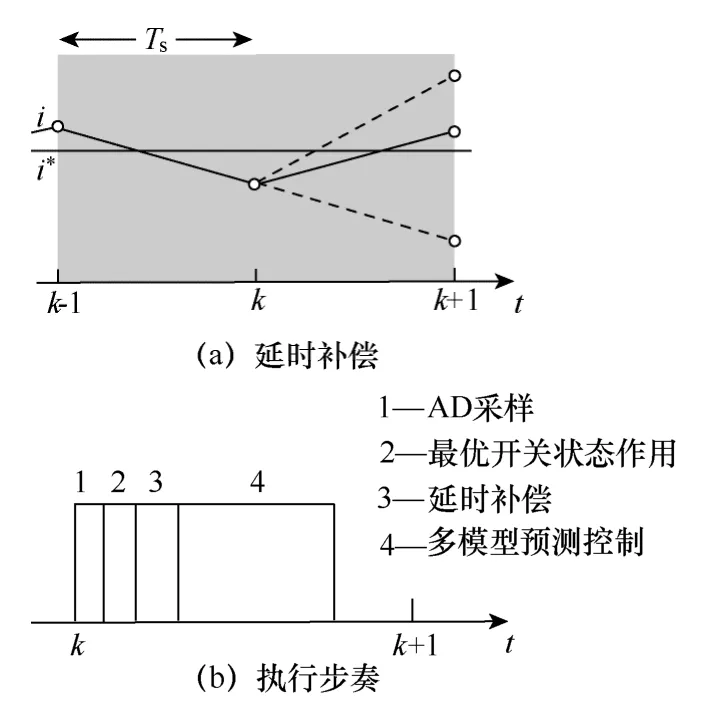
图7 延时补偿原理Fig.7 The principle of delay compensation
此时根据目标函数J,由第k+2 时刻系统状态确定本次滚动优化的最优开关状态,并将其保留至第k+1 时刻作用。从本质上说延时补偿属于二次预测的过程,在一个采样周期Ts内需基于离散预测模型对系统状态多次预测,以补偿修正最优开关状态作用时刻造成的控制滞后影响。
6 实验与分析
如图8 所示为所提多模型预测控制系统全局结构框图,系统可分为多模型自适应控制器、模型预测控制器以及无差拍简化控制器三个部分。为进一步验证上述策略的正确性和可行性,搭建了基于DSP+FPGA 控制的三电平PWM 整流器实验样机。下表为具体实验样机参数。

图8 多模型预测控制系统框图Fig.8 Control block diagram of multi-model predictive control

表 实验样机参数表Tab. Parameters of experimental system
6.1 鲁棒性实验
为验证模型参数失配对MPC 系统控制精度的影响,图9 为网侧滤波电抗器设定值L从0.25Ln变化至Ln和2.5Ln时的对比实验波形。由图可知,当模型参数失配严重时,三相PWM 整流器MPC 系统无法保持较高的控制精度,系统控制性能下降,网侧电流跟踪误差ierror抖动严重,同时系统偏离单位功率因数运行。

图9 三相PWM 整流器MPC 系统鲁棒实验Fig.9 Robust experiments of three-phase PWM rectifier MPC system
6.2 多模型辨识实验
根据三相PWM 整流器滤波电感及网侧电阻实测值,建立结构如式(4)所示三相PWM 整流器整体模型集Ω。滤波电感实测值Lmeas≈1.5mH、网侧电阻Rmeas≈0.01Ω,其中因实验样机网侧电阻R参数较小,其小范围内波动对控制精度影响不大,且考虑实际系统计算耗时问题,实验仅考虑滤波电感L波动构建三相 PWM 整流器多模型集,取滤波电抗Lmin=0.1mH、Lmax=5mH、滤波电感差值ΔL=0.1mH,此时包含模型集包含元素个数m=50。
6.2.1 多模型辨识启动实验
为验证多模型自适应控制器系统辨识效果,将滤波电抗器L初始设定值为4mH(L≈2.67Ln),进行三相PWM 整流器启动实验。图10 中在t=0.04s 时启动整流器,启动瞬间由于模型参数失配MPC 控制器电流跟踪性能较差,电流跟踪误差ierror偏离零点较大范围。经过约为0.01s 时间后,多模型自适应控制器辨识得到较为准确的系统模型,此后MPC控制器保持优异的跟踪精度。
6.2.2 不同移动子集模型数对比实验

图10 多模型预测控制启动波形Fig.10 Start-up waveform of multi-model predictive control strategy
通过引入移动子集的方式可以有效地避免对所有子模型的在线辨识,为确定移动子集包含不同模型数N时对控制效果的影响,分别取N=3 和N=11进行对比实验,如图11 所示。其中L初始设定值为4mH(L≈2.67Ln),经0.02s 后将多模型自适应控制器投入,对比图11a、图11b 可知,移动子集所包含模型数越多时,系统辨识速度越快,同时 MPC控制器保持更好的电流跟踪性能,但也带来更多的在线计算耗时。实际系统应根据处理器性能选择选择合适的移动子集模型数。
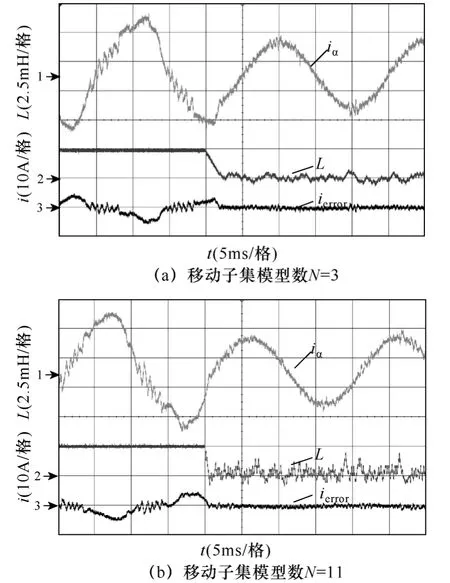
图11 不同移动子集模型数对比分析Fig.11 Comparison of the different moving subset numbers
6.2.3 滤波电感突变实验
为进一步验证多模型自适应控制器在辨识速度上的优越性,进行了滤波电感突变实验如图12 所示。在t=0.18s 时将整流器滤波电感由 3mH 切换至1.5mH,此时多模型自适应控制器快速响应实际系统电感变化,系统保持较优异的辨识速度和精度,网侧电压电流正弦度高,系统接近单位功率因数运行。

图12 滤波电感突变时整流器波形Fig.12 Waveform of rectifier when mutation happen in filter inductor
6.3 延时补偿前后对比实验
实验过程中采样周期Ts为100μs,数字处理系统完成 AD 采样耗时约为 5μs,移动子集模型数N=11 时多模型自适应控制运算时间约为20μs,预测控制滚动寻优耗时约为 35μs,则总控制延时tcal≈60μs。考虑到tcal在采样周期Ts中所占比重较大,需设计延时补偿策略以克服AD 采样点与开关状态作用时刻不匹配问题。图13 为延时补偿算法使用前后系统稳态实验图,通过对图13a、图13b 对比分析可知,在相同的采样频率和电流给定情况下,具有延时补偿的MPC 系统输出电流脉动更小,具有更优异的电流跟踪精度。
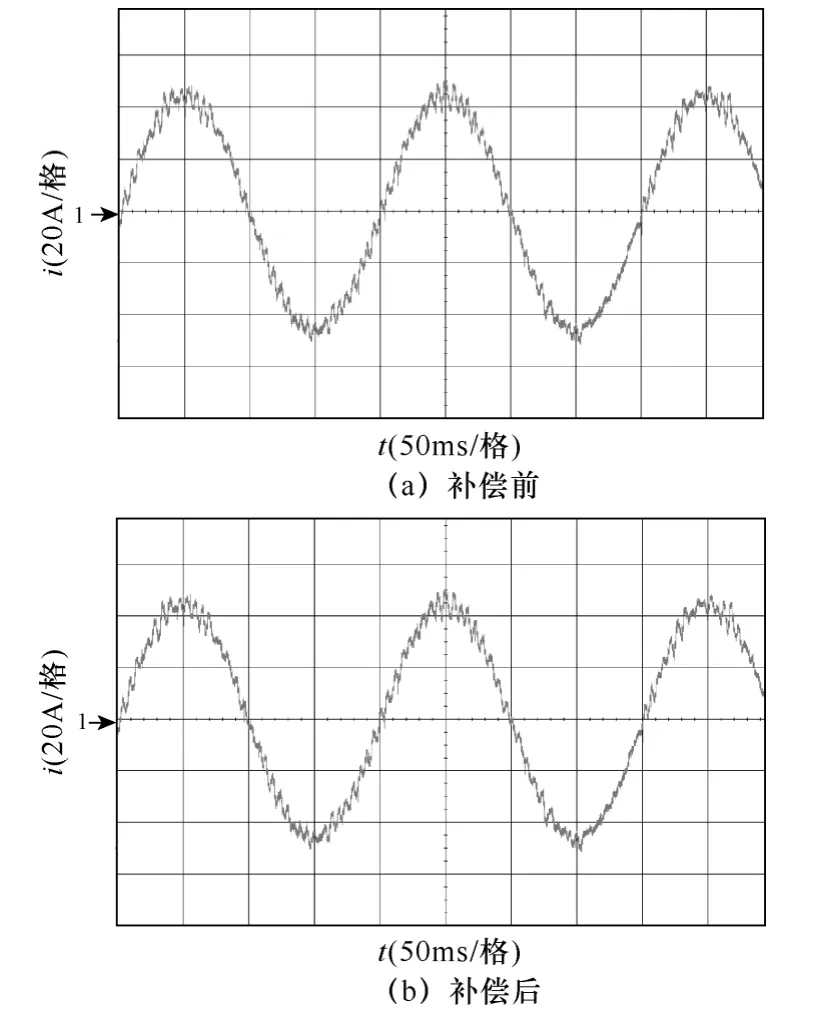
图13 模型预测控制延时补偿前后对比实验Fig.13 Experimental results for MPC without and with delay compensation
7 结论
通过对三相PWM 整流器多模型预测控制系统的研究和设计,可以得出以下结论:
(1)采用多模型自适应控制进行PWM 整流器参数辨识,可以快速获得预测效果最优的系统离散预测模型,算法结构简单,充分体现了预测控制只关注模型的预测功能而不注重模型具体形式的本质特点。
(2)利用在线优化的移动子集代替整个模型集,在不损失计算精度情况下,有效地限制了在线计算耗时。随着移动子集模型数N的增多,其模型辨识速度显著提升,实际系统应根据计算能力选择合适的移动子集模型数。
(3)在MPC 滚动优化之前通过插入无差拍控制器的方式获得理想情况下最优电压矢量Vopt位置,仅需对Vopt附近的离散电压矢量进行搜寻即可确定实际系统的最优输出。有效地克服了传统MPC遍历法搜寻效率低的缺陷,此方法为多电平变流器MPC 系统设计提供了简化思路。
[1]张兴.PWM 整流器及其控制[M].北京:机械工业出版社,2012.
[2]王久和,李华德,王立明.电压型PWM 整流器直接功率控制系统[J].中国电机工程学报,2006:26(18):54-60.Wang Jiuhe,Li Huade,Wang Liming.Direct power control system of three phase boost type PWM rectifiers[J].Proceedings of the CSEE,2006,26(18):54-60.
[3]Noguchi T,Tomiki H,Kondo S.Direct power control of PWM converter without power-source voltage sensors[J].IEEE Transactions on Industry Applications,1998,34 (3):473-479.
[4]Cortes P,Rodrigues J,Antoniewicz P.Direct power control of an AFE using predictive control[J].IEEE Transactions on Power Electronics,2008,23(5):2516-2523.
[5]杨勇,赵方平,阮毅.三相并网逆变器模型电流预测控制技术[J].电工技术学报,2011,26(6):153-159.Yang Yong,Zhao Fangping,Ruan Yi.Model current predictive control for three-phase grid-connected inverters[J].Transactions of China Electrotechnical Society,2011,26(6):153-159.
[6]Rodrigues J,Pontt J,Cesar A.Predictive current control of a voltage source inverter[J].IEEE Transactions on Industrial Electronics,2007,54(1):495-503.
[7]Vargas R,Cortes P,Ammann U.Predictive control of a three-phase neutral-point-clamped inverter[J].IEEE Transactions on Industrial Electronics,2007,54(5):2697-2705.
[8]Lee K J,Park B G,Kim R Y.Robust predictive current controller based on a disturbance estimator in three-phase grid-connected inverter[J].IEEE Transactions on Power Electronics,2012,27(1):276-283.
[9]Xia Changliang,Wang Meng,Song Zhanfeng.Robust model predictive current control of three-phase voltage source PWM rectifier with online disturbance observation[J].IEEE Transactions on Industral Informatics,2012,8(3):459-471.
[10]何礼高,陈鑫兵.变电感参数三电平不可逆 PWM整流器的电流PI 优化控制[J].电工技术学报,2011,26(7):203-209.He Ligao,Chen Xinbing.Optimized PI current controller of three level unidirectional PWM rectifier under variable inductance[J].Transactions of China Electrotechnical Society,2011,26(7):203-209.
[11]王恩德,黄声华.三相电压型 PWM 整流器的新型双闭环控制策略[J].中国电机工程学报,2012:32(15):24-30.Wang Ende,Huang Shenghua.A novel double closed loops control of three-phase voltage-sources PWM rectifier[J].Proceedings of the CSEE,2012,32(15):24-30.
[12]Malinowski M,Kazmierkowski M P.A comparative study of control techniques for PWM rectifiers in ac adjustable speed drive[J].IEEE Transactions on Power Electronics,2003,18(6):1390-1396.
[13]Kouro S,Cortes P,Vargas R.Model predictive control—A simple and powerful method to control power converters[J].IEEE Transactions on Industrial Electronics,2009,56(6):1826-1838.
[14]郑益慧,王昕,李少远.随即系统多模型直接自适应解耦调节器[J].自动化学报,2010,36(9):1295-1304.Zheng Yihui,Wang Xin,Li Shaoyuan.Multiple models direct adaptive decoupling controller for a stochastic system[J].Acta Automatica Sinica,2010,36(9):1295-1304.
[15]谷俊杰,冀乃良,孙玉洁.核电站蒸汽发生器水位的自抗扰多模型控制方法研究[J].动力工程学报,2012,32(5):373-377.Gu Junjie,Ji Nailiang,Sun Yujie.The multimodel based active disturbance rejection control for water level of steam generator in nuclear power plants[J].Journal of Chinese Society of Power Engineering,2012,32(5):373-377.
[16]丁宝苍.预测控制的理论与方法[M].北京:机械工业出版社,2008.
[17]Geyer T,Papafotiou G,Morari M.Model predictive direct torque control—Part I:concept,algorithm,and analysis[J].IEEE Transactions on Industrial Electronics,2009,56 (6):1894-1905.
[18]张智焕,王树青.基于多模型切换的大范围预测函数控制[J].浙江大学学报,2002,36(3):291-293.Zhang Zhihuan,Wang Shuqing.Global predictive function control based on the switching of multiple models[J].Journal of Zhejiang University,2002,36(3):291-293.
[19]赵辉,李瑞,王红君.60°坐标系下三电平逆变器SVPWM 方法的研究[J].中国电机工程学报,2008,28(24):39-45.Zhao Hui,Li Rui,Wang Hongjun.Study on SVPWM method based on 60° coordinate system for threelevel inverter[J].Proceedings of the CSEE,2008,28(24):39-45.
[20]Seo J H,Choi C H,Hyun D S.A new simplified space vector PWM method for three-level inverter[J].IEEE Transactions on Power Electronics,2001,16(4):545-550.