大惯量负载永磁同步电机断电-寻优重投控制系统
2014-11-25刘卫国骆光照
高 雅 刘卫国 骆光照
(西北工业大学自动化学院 西安 710129)
1 引言
随着高速轨道交通的快速发展和能源问题、环境污染问题日益严峻,人们对新一代绿色节能轨道机车的牵引电机提出了越来越高的要求。永磁同步电机作为机车的牵引电机已经成为一个新的研究方向。目前,国外在这方面的研究已经取得了一定的进展,但相关文献公开的很少,而国内相关的研究还正处于起步阶段。
在电气化铁道中接触网基本都采用单相分段换相式供电,每间隔一定距离,机车受电弓都需要经过一个分相绝缘器进入另外一供电相,在进出分相绝缘器时,机车受电弓必须是无电状态,此时电机驱动系统经历了一个断电-重投的过程;现有的机车牵引电机为感应电机,而如果替换为永磁同步电机同样需要经历此过程。对于其他永磁同步电机作为动力的系统,如电动汽车和各种机床的运动系统如果出现短时可恢复性故障,或短时停电、短时保护装置启动等情况,都会出现断电-重投过程;
永磁同步电机与感应电机相比,重投的难点在于其转子为恒定励磁永磁体,当负载为机车等大惯量负载断电时,电机速度衰减很慢,重新投入电源时,本文研究问题尤为突出。即当一定短时间后电机重新投入控制运行时,转子励磁磁场由于高的电机转速存在,使定子绕组产生高反电动势。所以说大惯量负载永磁同步电机在重新投入时,必须考虑反电动势的作用,如果忽略反电动势的作用或不恰当地考虑电机内部磁场时间和空间上的变化,必将导致很大的电流和转矩冲击,大的冲击电流会损坏电机控制系统,而大的转矩冲击会引起电机内部结构和机械传动机构的损坏[1-5]。
目前,国内关于永磁同步电机断电-重投瞬态分析和如何减小冲击的方法研究几乎未见公开文献。当前,电机的断电再重投瞬态分析主要集中在感应电机方面,而且对于存在的冲击从仿真方面出发说明冲击的大小与加入的电压幅值及相位有关,但具体从理论上分析的不多,而且也没有从量的角度出发去确定具体的影响因素有哪些及提出如何最大限度的减小冲击的方法[6-15]。早在20 世纪80 年代,Htsui 就针对感应电机断电-重投过程进行研究,分析了气隙动态转矩幅值、频率及其影响因素,并据此提出感应电机重投过程导通逻辑[6-8]。此后,多位学者分别就瞬态电压下跌时系统稳定性[9]、最优重投时刻[10]、重投过程中残压[11]等展开深入的探讨。文献[12]考虑主磁路饱和时三相感应电动机在 d-q静止坐标系下的状态方程,通过实例对瞬时电压骤降引起电动机瞬态运行过程进行了计算机仿真计算。文献[13]列出了三相感应电动机起动、断电和重新投入电网时的运动方程,着重研究了断电后定子电流、转速、转角等初始位的确定,以及最不利的重投时间。文献[15]通过实例对瞬时电压骤降引起的三相感应电动机的瞬态运行过程进行了计算机仿真计算。
针对永磁同步电机的瞬态冲击分析过程,本文首先改进了电机的数学模型,引入了等效阻尼绕组的概念,为其赋予了新的含义,即将内部涡流等磁场瞬变参数等效为阻尼绕组的方法。然后从冲击产生的基本原理出发,分析了电压大小和投入角度对冲击的作用量,重投瞬间冲击产生的原因,给定转速对控制电流和转矩冲击的影响;并且结合试验结果对冲击强度进行了分析。本文设计了一种使重投电流冲击减小的闭环最优控制系统,其中包括一个电压模拟控制器和寻优控制器。最后经过实验和仿真对比,说明了分析的有效性和设计的寻优控制系统在减小冲击方面的积极作用。该方法属于永磁同步电机断电重投技术的起步研究,提出的方法可以最大程度地减小冲击,为以后该方面的进一步研究提供一定的借鉴。
2 永磁同步电机数学模型
本文在原有忽略磁场饱和效应、谐波反电动势、磁滞及涡流损耗等影响下,建立的转子同步d-q 旋转坐标系的永磁同步电机数学模型的基础上,利用等效阻尼绕组的概念,考虑了涡流、漏磁等在磁场瞬变过程中的变化情况,使其针对瞬态过程进行了一定的改进。
永磁同步电机d、F 和D 绕组的电压方程和磁链方程为

将式(2)表示为

式中 F——永磁体等效的励磁绕组;
D——电机内部磁场变化时为分析涡流等内部参数变化而等效的d 轴阻尼绕组;
ψD,ψd,ψF——等效阻尼绕组D 的磁场、定子绕组d轴磁场和永磁体磁场;
rD,xD,xd,xF——等效阻尼绕组D 的电阻、自感、定子绕组d 轴自感和等效永磁体自感;
xaF,xaD,xFD——定子绕组d 轴与永磁体、定子绕组d轴与等效阻尼绕组D、永磁体与等效阻尼绕组D 之间的互感。
q、Q 绕组的电压方程和磁链方程为
整理得
将式(5)可表示为

式中 Q——电机内部磁场变化时为分析涡流等内部参数变化而等效的q 轴阻尼绕组;
ψq和ψQ——定子绕组q 轴和等效阻尼绕组Q 磁场;
rQ,xQ和xq——等效阻尼绕组Q 的电阻、自感和定子绕组q 轴自感;
xaQ——定子绕组q 轴与等效阻尼绕组Q 之间的互感。
将式(1)和式(4)简化为

3 永磁同步电机重投时的冲击分析
对于永磁同步电机的断电重投,将重投后电机的激励源减去断电后重投前的激励源部分,认为是在原有发电机空载情况下加入了外界的扰动,从而达到新的负载平衡的过程[16]-[17]。运行中电机重新投入电压,效果等同于加入新的扰动分量的方程组为

解式(11)得

对于四阶线性方程式,它的解的形式应该为

式(13)的稳定分量Δid∞和Δiq∞即系统稳定之后的电流值,可利用拉普拉斯变换终值定理得

如果忽略定子电阻,从式(14)可以得到稳定之后的值

如果忽略各个绕组的电阻,上面的 Xd(p) 和Xq(p) 简化为,则Δid和Δiq简化为

对上式进行拉普拉斯变换得

解上式方程得
从式(18)可以看到,定子电流在d、q 坐标系下具有非周期分量和周期分量,转换到a、b、c 三相为周期分量和非周期分量。
式(18)是总的电流值,它包括稳定分量和自由分量,自由分量是由于电阻原因而不断衰减的量,式(19)为电流中的自由分量。

式(18)中周期分量的衰减时间常数可以在忽略阻尼绕组电阻的情况下通过前面的特征方程求得,为



4 永磁同步电机寻优重投控制系统设计
针对上面的分析知,重投瞬间冲击强度与投入时的反电动势、端部电压及电流的变化率等有关。根据以上结果,本文设计了一个使重投瞬间冲击最小的寻优重投闭环控制系统,它的主要结构由给定转速计算模块,电流电压转换模块(CVCM),电压模拟控制器(VSC),和寻优控制器组成。图1 为设计的大惯量负载永磁同步电机断电-寻优重投闭环控制系统框图。
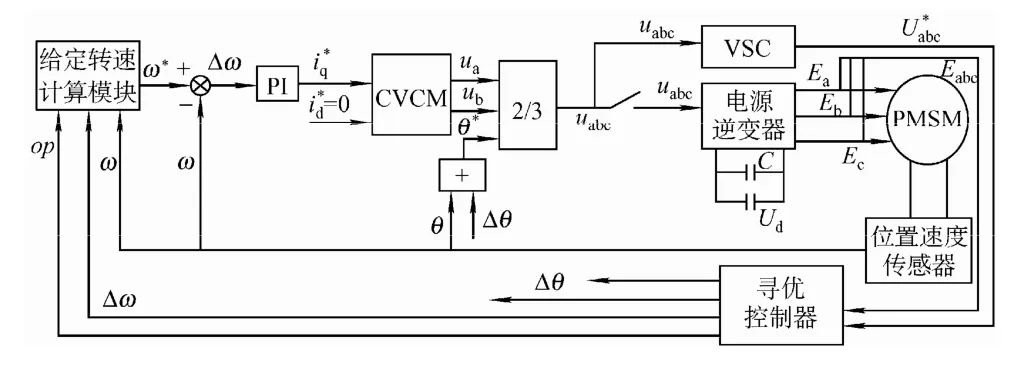
图1 大惯量负载永磁同步电机断电-寻优重投闭环控制系统框图Fig.1 Block diagram of large inertia load PMSM power down-optimizing and rejoining on control system
4.1 给定转速
大惯量负载永磁同步电机在断电期间的转矩方程为

在重投之后的转矩方程为

根据对比分析:电机需要的电磁转矩Te与转速和转速的变化率有关,当给定转速大于ω0(ω0为重投瞬间的电机实际速度,根据机车运行方向,设ω0>0)时,给定转速越大,需要的电磁转矩越大,即需要的q 轴电流越大;当给定转速小于ω0时,存在某一个值使重投瞬间需要的电磁转矩为零,而当给定转速小于这个值时,瞬间需要产生一个负的电磁转矩,使力矩平衡。假设给定转速是电磁转矩为零的点,重投过程将是一个转矩从零到一定值的平稳过渡过程,即q 轴电流也为一个平稳的过渡过程。
4.2 id=0 的控制方法在重投时的应用
4.3 电压模拟控制器
断电重投时,端部电压Uabc和反电动势Eabc的幅值和相位差对于重投时的冲击大小起到主导性作用,所以它们的实时测量和分析对于重投点的选择至关重要。根据当前的控制要求,检测端部电压和反电动势需要在电机和逆变器之间加入一个机械开关,当投入时将其开通,当断电时将其关断。
本文设计了一个电压模拟控制器,模拟电压逆变器的工作原理,可以得到与上面的方法基本相同的端部电压,通过实时检测它来不断的与反电动势Eabc进行对比;当断电后关闭可控器件控制端的开关KA,当满足重投条件时,开通逆变器可控器件。原来在主线路上的机械开关在开通和关断时有可能存在大的电弧,而本设计中将开关加在控制线路上,减小了机械开关本身的机械冲击。
4.4 寻优控制器
在前面设计的基础上本文设计了一个寻优控制器。它为保证闭环控制系统重投瞬间端部电压和反电动势相位基本一致,加入了位置补偿的环节。
寻优控制器通过对检测到的端部电压和反电动势的幅值和相位比较,不断的校正给定转速的误差值Δω 和位置的补偿值Δθ,直到检测值两者之间的幅值误差和相位误差满足条件才准备重投。
5 实验验证和仿真分析
在基于 DSP 的永磁同步电机实验平台上进行了实验,图2 为现场实验装置,电机参数见下表。

图2 现场实验装置Fig.2 The field experimental device

表 永磁同步电机参数Tab. Parameters of the PMSM
下面为选择不同相位实验时的电流波形:图3为实验时,逆变器输出电压与反电动势电压相位差基本一致,但在不同相位重投时的波形图,其中曲线1 为A 相、2 为B 相、3 为C 相。图3a 为实验时C 相电压是0°时的重投波形。其他两相该时刻瞬时电压幅值应该是,重投瞬间电压可以反映电流值,而电流值可以反映磁场的变化情况,当然磁场变化越小,阻尼绕组等的阻碍作用越小,冲击也就越小。实验结果为A、B 两相的冲击电流较C 相大,且冲击幅度基本相同。图3b 为C 相电压是90°时的重投波形。即C 相电压幅值为,其他两相该时刻的瞬时电压幅值应该是,实验结果为 A、B 两相的冲击电流较C 相小,且两相冲击幅值基本相同。图3c 为C 相电压是180°时的重投波形。当C 相电压幅值为0,其他两相该时刻的瞬时电压幅值应该是,实验结果为A、B两相的冲击电流较C 相大,而且冲击幅值基本相同。图3d 为实验时C 相电压为270°时的重投波形。当C 相电压幅值为,其他两相该时刻的瞬时电压幅值应该是,实验结果为A、B 两相的冲击电流较C 相小,且两相冲击幅值基本相同。上面通过不同角度重投的试验波形对比,得到了不同角度重投冲击强度的差异。

图3 不同反电动势电压相位重投实验时的结果Fig.3 Experimental results of the different back-EMF phases when rejoining power on
图4 为重投瞬间给定速度为100r/min,运行速度分别 90r/min、95r/min、100r/min、105r/min 和110r/min 时的电流波形。从图可知:不同运行速度对应的最大电流各不相同,90r/min 对应约50A、95r/min 对应约25A、100r/min 对应约7A、105 r/min对应约25A、110r/min 对应约50A。即在一定范围内,实际运行速度与给定转速越接近,电流越小;当给定转速越接近实际运行转速,需要的最大电流越小。以此验证了本文设计的给定转速计算方法的正确性和在减小冲击方面的必要性。

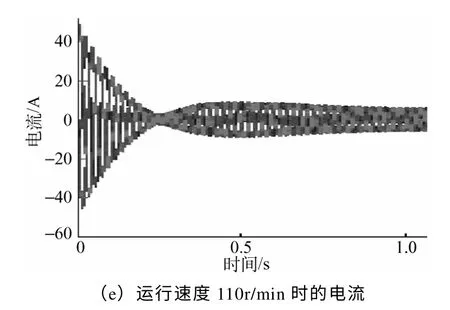
图4 重投瞬间运行速度不同时的电流波形Fig.4 The current waveforms of the different running speeds when rejoining power on
本文所设计的寻优重投控制系统,利用逆变器电压模拟控制器得到的端部电压和反电动势的在线实时比较,对给定转速和位置补偿角进行了实时校正,将其重投瞬间的误差限定在一定的范围内。


图5 重投瞬间电压相位差不同时的电流波形Fig.5 The current waveforms of the different diversity of voltage phases
6 结论
针对牵引机车用永磁同步电机断电重投瞬间电流和转矩冲击大的问题,首先从瞬态分析的角度改进了永磁同步电机的数学模型,引进了等效阻尼绕组的概念。在新的模型的基础上,分析了断电-重投瞬间冲击产生的原因。根据分析结果,设计了一套新的针对重投瞬间的寻优重投闭环控制系统,在控制系统中对给定转速和反馈位置进行了一定的补偿和限制,设计了电压模拟控制器和寻优控制器,运用了id=0 的电流控制方法。经过仿真和实验,说明了本控制方案具有一定的适用性,可为后面的分析研究提供一定的参考。
[1]徐英雷,李群湛,许峻峰.城轨车辆永磁同步电机牵引系统研究现状与发展前景[J].电机与控制应用,2009,36(5):7-10.Xu Yinglei,Li Qunzhan,Xu Junfeng.Overview on permanent magnet synchronous motors traction system for urban rail rolling stock[J].Electric Machines and Control Application,2009,36(5):7-10.
[2]冯江华,桂卫华,符敏利,等.铁道车辆牵引系统用永磁同步电机比较[J].铁道学报,2007,29(5):111-116.Feng Jianghua,Gui Weihua,Fu Minli,et al.Comparison of permanent magnet synchronous motors applied to railway vehicle traction system[J].Journal of the China Railway Society,2007,29(5):111-116.
[3]郭晓燕,张黎.永磁同步电机在铁道牵引领域中的应用[J].铁道机车车辆,2005,25(10):61-65.Guo Xiaoyan,Zhang Li.Application of permanent magnet synchronous motor to driving railway vehicle[J].Railway Locomotive &Car,2005,25(10):61-65.
[4]Klockow T.永久磁铁励磁的牵引电动机[J].王渤洪,译.变流技术与电力牵引,2003(4):37-39.Klockow T,et al.Traction motors with permanent magnet material[J].Converter Technology &Electric Traction,2003(4):37-39.
[5]Kondo,Minoru.Application of prmanent magnet synchronous motor to driving railway vehicles[J].Railway Technology Avalanche,2003(1):10-12.
[6]Htsui J S C.Non-simultaneous reclosing air-gap transient torque of induction motor:part i,analysis and computation logic[J].IEEE Transactions on Energy Conversion,1987,EC-2(2):269-275.
[7]Htsui J S C.Non-simultaneous reclosing air-gap transient torque of induction motor:part ii,sample studies and discussion on reclosing of ANSI C50.41[J].IEEE Transactions on Energy Conversion,1987,EC-2(2):276-284.
[8]Htsui J S C.Magnitude,amplitudes and frequencies of induction-motor air-gap transient torque through simultaneous reclosing with or without capacitors[J].IEEE Transactions on Power Apparatus and Systems,1985,PAS-104(6):1519-1525.
[9]Das J C.Effects of momentary voltage dips on the operation of induction and synchronous motors[J].IEEE Transactions on Industry Applications,1990,26(4):711-718.
[10]Faiz J,Ghaneei M,Keyhani A.Performance analysis of fast reclosing transients in induction motors[J].IEEE Transactions on Energy Conversion,1999,14(1):101-107.
[11]Wang A,Ling Z,Liu W.Residual voltages analysis in reclosing process for induction machine[C].Proc.7th World Congress on Intelligent Control and Automation(WCICA),2008:4785-4788.
[12]高吉增,杨玉磊,崔学深.感应电动机失电残压的研究及其对重合过程的影响[J].电力系统保护与控制,2009,37(4):45-48.Gao Jizeng,Yang Yulei,Cui Xueshen.The research of the residual voltage of induction motor after dumping and its influence during restoration[J].Power System Protection and Control,2009,37(4):45-48.
[13]汤晓燕.三相感应电动机瞬态断电重新投入电网时的瞬态[J].电机与控制学报,2001,5(2):98-102.Tang Xiaoyan.Reclosing transient of three-phase asynchronous motor[J].Electric Machines and Control,2001,5(2):98-102.
[14]谢可夫.瞬时电压骤降时三相感应电动机瞬态分析[J].湖南师范大学自然科学学报,2003,26(4):47-50.Xie Kefu.Transient analysis of three-phase induction motor with momentary voltage dips[J].Journal of Hunan Normal University(Nature Science),2003,26(4):47-50.
[15]耿艳杰,冯志华.异步电机在重投入中过渡过程的建模和仿真[J].防爆电机,2005,40(4):20-22.Geng Yanjie,Feng Zhihua.Model and simulation on reclosing transient process of induction motor[J].Explosion-Proof Electric Machine,2005,40(4):20-22.
[16]黄家裕.同步电机基本方程和短路分析[M].北京:水利电力出版社,1993.
[17]许实章.电机学[M].北京:机械工业出版社,1995.
