基于视觉的缩微智能车跟驰问题研究*
2014-11-23毕建权张耀鹏杨奇才
毕建权 张耀鹏 杨奇才 杜 静
(1.洛阳电子电子装备试验中心 洛阳 471003)(2.平顶山市工业学校 平顶山 467000)
1 引言
车辆跟驰交互是车辆群智能研究的核心,也是智能交通流仿真研究的重要内容。目前,国内外相关研究较多,主要是基于单车道下的车辆跟驰模型建立和参数优化。常见的跟驰模型有GM 模型、线性模型、安全距离模型、AP 模型和模糊逻辑模型等[1]。
GM 模型[2]是由Gazis和Herman 等 于1958年提出的最经典跟驰模型,其假设车辆加速度与两车相对速度Δv成比例,目前GM 模型研究主要致力于不同环境下最优参数的选取。Helly 线性模型[3]与GM 有很大不同,它将前车的减速制动引入模型,Helly线性模型最大的不足是其对速度差值反应量是一致的。基于安全车距的跟驰模型与GM 模型的刺激-反应原理不同,其是基于车辆行驶中不发生碰撞的安全距离控制驾驶的模型,也称为防追尾模型[4]。模糊逻辑跟驰模型[5]是由Kikuchi和Chakroborty于1992年提出,主要基于模糊推理解决车辆跟驰问题,该模型可复现真实的跟驰驾驶行为,在加速度、相对速度和速度标准误差等方面比GM 模型要好。AP模型(Action Point Model)[6]则是Michaels基于驾驶员心理行为建立的模型,主要将感官的刺激抽象为相对速度和距离的变化。此外,很多研究者也对上述模型做了一些拓展性研究,如基于TSK 模型的车辆跟驰模型[7],基于最优控制的车辆跟驰模型[8],基于期望车速的跟驰模型[9],考虑侧向偏移的跟驰模型[10]等。目前跟驰模型都是基于单车道、前车状态参数已知的条件下开展的,而实际交通环境中车辆跟驰行为都是在前车速度、加速度、最大减速度等状态参数未知,驾驶员完全凭借两车间距实现跟驰。
因此,本文通过单目视觉导航缩微智能车设计了一种基于视觉测距的多车道复杂环境下的车辆跟驰策略,解决仅依赖视觉的车辆跟驰可行性和有效性的问题,为进一步群缩微智能交互、交通仿真与评估研究奠定基础,对研究拟人交互驾驶、缩微交通仿真等研究提出一种新仿真实验平台。
2 基于视觉的缩微车辆跟驰模型
2.1 基于视觉的缩微车辆跟驰交互策略
实际交通环境下,前车行驶状态未知,用于跟驰控制的信息受限,后车驾驶员仅依靠眼睛判断两车间距、前车尾灯和路况等信息,实现对车辆的跟驰控制。为模拟真实交通信息受限条件下的车辆跟驰行为,本文在多车道环境下研究基于视觉测距的跟驰交互策略,模拟驾驶员基于视觉跟驰的行为,并通过缩微智能车跟驰实验验证交互策略及跟驰模型的有效性,需要解决问题有:基于视觉的车辆检查和距离估计、基于制动距离的线性跟驰模型、基于车辆横向位置和车尾灯的跟驰交互模型等。对应的跟驰交互策略如图1所示。本文主要研究内容如下:
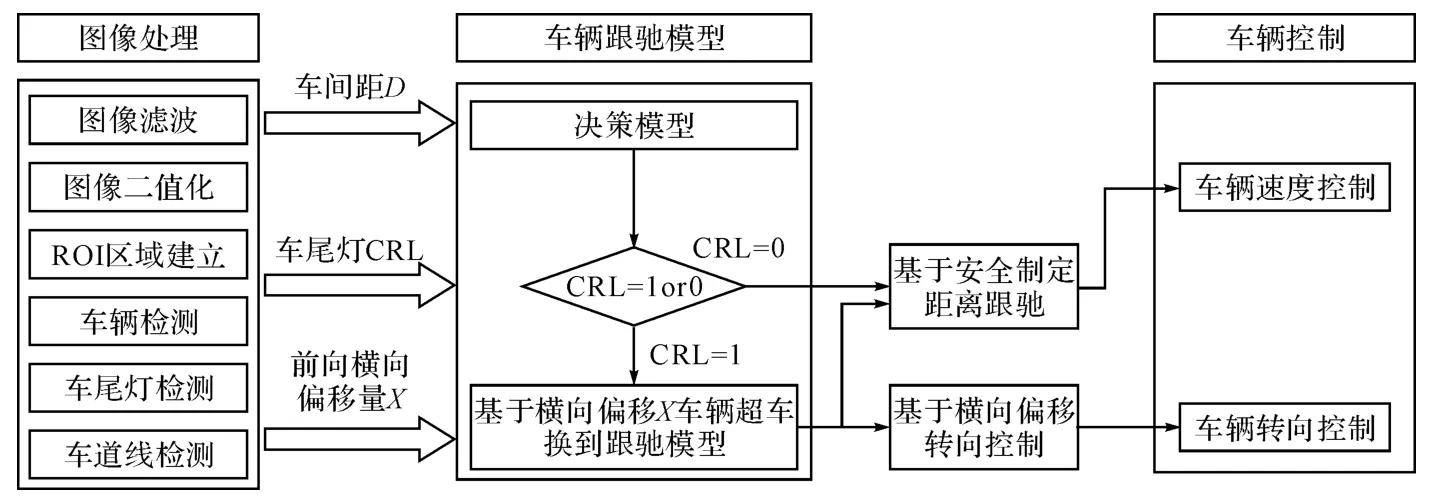
图1 多车道环境下基于视觉测距的车辆跟驰交互结构图
1)车辆制动距离模型分析;
2)基于视觉测距单车道跟驰模型;
3)多车道下,基于车尾灯、视觉测量的横向偏移量的车辆跟驰策略。
由图1可知,缩微车跟驰主要根据车间距D,车尾灯CRL,前车横向偏移量x,其中车尾灯CRL=0是表示前车尾灯不亮,采用单车道内的基于安全制动距离的跟驰;CRL=1是表示前车有换道行为,后车采用基于x车辆跟驰,由基于横向偏移量的转向控制和基于安全制动距离的跟驰共同完成,即基于安全制动距离的超车换道跟驰模型。
2.2 车辆制动距离模型
本文跟驰交互研究是基于视觉的广义跟驰,即驾驶行为跟驰,目的不是在速度和加速度上完全重复被跟驰车辆,主要与前车保持动态安全距离的行为重现。前车采取停车、加速、减速、换道等行为时,后者在安全距离内依次响应前方驾驶动作。跟驰模型中可用于跟驰控制参数只有车间距、前车尾灯、车道线和前车横向偏移量,对被跟驰车辆的信息完全未知,与实际交通路况相似。本文中做了如下几点合理的假设:
1)车辆制动距离与速度成正比例关系。
2)被跟驰车辆速度未知,基于安全考虑,计算制动安全距离时假设前车为最危险情况,即车速为0。
3)被跟驰车辆不存在倒车行为,只完成加速、减速、停车、换道等驾驶行为。
本文车辆制动模型采用基于制动过程的经典安全模型[11],如式(1)所示:

式中v是指后车制动前的速度;t为车辆制动迟滞时间;am为减速度,d为车辆制动停止后与前车的距离。通过实验得的制动距离D随速度变化曲线,其二次拟合方程如式(2)所示。可知,本文实验中的缩微智能车对应制动迟滞时间t=0.0126s,最大减速度am=0.63m/s。

2.3 基于安全制动距离的跟驰模型
将跟驰车辆不同速度下的车辆制动距离作为跟驰安全距离,理想期望安全距离应该比制动距离大弹性变量ξ,防止车辆发生紧急碰撞,如式(3)所示。根据对安全车间距要求选择ξ大小,但不能为负,即期望距离不能比制动安全距离小,本文选取ξ=0.05m。

本文采用基于安全制动距离的线性模型如式(4)所示,将视觉测量的距离变化率Δv(t)、车间距与期望安全距离的差值Δx(t)-D-ξ作为t时刻车辆加速度an(t)两线性控制量,其中C1为速度差值在控制加速度中的权重,C2是距离差值在加速度控制中的权重,an(t)表示t时候后车加速度。

2.4 基于横向偏移量的车辆跟驰策略

图2 横向偏移量控制参数图
基于横向偏移量的换道跟驰跟驰模型主要是基于车尾灯的多车道跟驰模型,该模型中除了需要对车辆速度进行控制外,还需对车辆的转角进行控制,使车辆重现前方车辆的换道行驶行为,同时确保两车处于安全距离。此模型中用于控制参数如图2所示,分别为横向偏移量x=AB,车间距D=AC,其中x用于车辆的转向控制系统,本文采用输入量为x和x变化率的模糊控制算法,而AC则作为式(4)中参数D。图2中A表示前车尾部中心点,B表示与A在同一横向位置的车辆中心轴,C表示后车前沿中心点,则BC为后车中轴线。
3 环境感知算法
环境实时感知是缩微智能车交互研究的基础,由于需要检测的元素多,处理器能力有限。为提高检测的速度,满足智能驾驶需求,本文基于道路环境结构化特点,提出一种完全基于像素点的快速道路元素检测算法,如图3所示,并对环境检测识别的区域、分辨率和频率进行优化,进一步提高系统实时性和稳定性。主要优化方法有:
1)图像分割检测。基于结构化道路中各元素的特定分布,采用分区域检测方法。
2)图像跟踪检测。根据相邻帧图像的连续性,对同一元素进行跟踪识别,缩小检测范围。
3)基于特定场景环境触发相应检测算法,降低元素的检测次数。
4)多分辨率道路元素检测。根据元素的远近和识别精度的需求,采用不同分辨率的图像,既可提高检测效率也能满足检测精度。
5)优化耗时检测次数。
6)基于典型特征快速识别环境元素,提高单次检测效率,降低检测复杂性。

图3 不同分辨率下的环境检测原理图
图3为本文环境感知框图结构,其中车辆、信号灯、人偶、标志牌等主要基于颜色、形状、位置、对称性等特征;车道线、斑马线、路面标志主要基于灰度图像中连通域形状、数量等特征快速区别,涉及到模板匹配、ROI跟踪等方法。十字路口判断标志是检测到斑马线和停止线。通过上述优化设置,可使缩微智能车在某些情况下对特定道路元素视而不见,见而不识,优化检测次数和效率,提高环境感知实时性。
4 实验验证
4.1 跟驰模型参数的仿真实验
本文通过Matlab仿真验证模型理论有效性,并根据实际车辆机械性能及跟驰性能需求确定模型参数值,即式(3)、式(4)跟驰模型中的速度差值权重C1和距离权重C2。本文通过Matlab对跟驰模型中涉及跟驰模型参数对车辆跟驰误差、响应时间等影响,选择一组合适跟驰参数,图4分别是C1、C2对速度跟驰性能的影响曲线,蓝色曲线为前车速度曲线,对应方程为V前车=0.2+0.02t,红线为后车速度曲线。由图可知,C2恒定时,C1越大,稳定时间越短;C1恒定时,C2越大,超调越大。本文仿真实验初始条件为:车辆初始距离为1.0m,前车速度变化为V前车=0.2+0.02t,后车初始速度为0m/s。
受车辆机械性能影响,车辆加速度不可能太大,即图4中速度跟驰稳定时间不可能过短,时间太长则影响跟驰效果,即速度超调量不能过大。因此,本文选择C1=0.6,C2=0.3,在能满足试验需求的同时也不违背车辆机械性能特点。该参数下的跟驰曲线如图5所示,其中图5(a)、(b)对应前后两车速度和加速度的跟驰曲线,图5(c)中的蓝色曲线是跟驰过程中的车间距,红色为安全距离曲线,图5(d)为车间距与安全距离差值随时间变化的曲线。

图4 C1,C2对速度跟驰性能的影响曲线

图5 C1=0.5,C2=0.3时的参数跟驰曲线
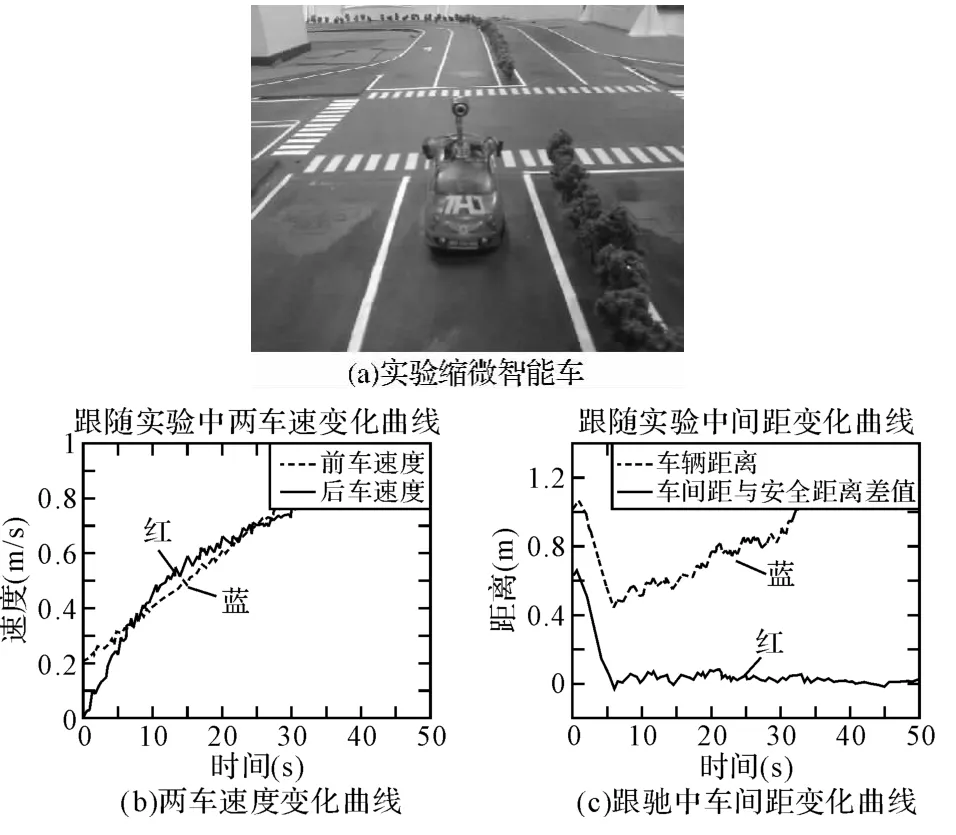
图6 缩微智能车跟驰过程中各参数曲线
4.2 缩微智能车跟驰实验
为验证跟驰模型仿真参数的有效性,本文通过图6(a)所示缩微智能车进行跟驰实验。根据跟驰过程车辆速度和视觉测量的车间距可以得到车辆速度和距离差值的跟驰曲线,如图6(b)、(c)所示。实验中前车速度是人为设置,如图6(b)中蓝色线所示,V前车=0.2+0.02t,红线为后车跟驰速度,初始值为0m/s,初始两车距离为1m;图6(c)中的蓝色线是车辆跟驰时的车间距,它随速度改变而不断变化,而红线是车辆间距与安全距离间的差值变化曲线,与速度跟驰性能相似,跟驰行为稳定后差值近似为零。由此可见,基于视觉测距的安全距离线性跟驰模型能够达到很好跟驰效果,跟驰模型参数有效。
5 结语
本文主要研究只依赖视觉测距该受限条件下的车辆广义跟驰问题,包括单车道下的基于安全制动线性跟驰模型、多车道下基于横向偏移量的换道跟驰模型分析以及跟驰模型中涉及的车辆制动安全距离问题,通过仿真获得相关跟驰模型参数,并通过缩微智能车验证基于视觉跟驰模型的可行性和有效性,解决仅依赖于视觉测距信息下的跟驰问题,为进一步拟人交互驾驶,车辆协同、交通仿真与评估等研究提供技术支持。
本文研究对相对结构化的真实交通环境下的视觉跟驰模型和策略提供借鉴作用,但由于车辆的机械性能、控制、传感器精度、背景环境复杂度等方面存在差异,需要在图像处理算法和车辆控制算法进行完善。此外,本文中的缩微交通环境和车辆交互系统可以为智能交通研究提供缩微仿真实验平台,弥补智能交通计算机仿真研究可信度低的同时,降低了场地实验的成本和风险。
[1]张智勇,荣建,任福天.跟车模型研究综述[J].公路交通科技,2004,6(21):108-113.
[2]Adolf D.May.Traffic Flow Fundamentals[M].New Jersey:Prentice Hall Inc,1990(GM).
[3]Helly.W.Simulation of bottlenecks in single lane traffic flow[C]//Proceedings of the symposium on theory of traffic flow.Research Laboratories,General motors,New York:Elsevier,1959:207-23.
[4]Kometani,Sasaki.Dynamic behavior of traffic with an on linear spacing-speed relationship[C]//Proceedings of the symposium on theory of traffic flow research laboratories,General Motors,1959:105-119.
[5]Kikuchi.C,Chakroborty.P.Car following model based on a fuzzy inference system[J].Transportation Research Record,1992,1365:82-91.
[6]Mark Brackstone,Mike McMonald.Car following:a historical review[J].Transportation Research F,1999,2:181-196.
[7]陶诚,黄圣国.基于TSK 模型的车辆跟驰模型[J].华南理工大学学报,2009,3(37):144-148.
[8]张元元,王晓原,谭德荣,等.基于最优控制的车辆跟驰模型研究[J].山东理工大学学报,2011,1(25):6-10.
[9]吕贞,陆建.基于期望车速的跟驰模型研究[J].交通运输工程与信息学报,2010,3(8):68-73.
[10]宋现敏,金盛,王殿海,等.考虑侧向偏移的车辆跟驰模型[J].吉林大学学报(工学版),2012,2(41):333-337.
[11]许伦辉,罗强,吴建伟,等.基于最小安全距离的车辆跟驰模型研究[J].公路交通科技,2010,10(27):95-100.
[12]Hsu-Yung C,Bor-Shenn J,Pei-Ting T,et al.Lane Detection With Moving Vehicles in the Traffic Scenes[J].Intelligent Transportation Systems,IEEE Transactions on.,2006,7(4):571-582.
[13]Chun-Che W,Shih-Shinh H,Li-Chen F.Driver assistance system for lane detection and vehicle recognition with night vision[C]//Intelligent Robots and System,2005:3530-3535.
[14]Zu K.Realtime lane tracking of curved local road[C]//Intelligent Transportation System Conference,2006:1149-1155.
[15]D'Cruz C,Jua J Z.Lane detection for driver assistance and intelligent vehicle applications[C]//Communications and Information Technologies,2007:1291-1296.