长航时捷联惯导系统综合校正方法*
2014-11-23
(中国空空导弹研究院 洛阳 471009)
1 引言
陀螺漂移导致惯导系统的长期工作精度严重下降,是引起惯导系统位置误差的最主要因素。为了保证长航时惯导系统的长期工作精度,需要定期地对惯导系统部分误差参数进行重调,并对陀螺漂移进行测定和补偿,这一技术即是综合校正技术[1]。
传统的长航时惯导多为平台惯导,因而综合校正方法一般针对平台惯导开展研究。平台惯导综合校正方法多建立在OEPQ 坐标系的ψ方程基础上[2~6],理论分析和实际应用表明,这些方法都不可避免地需要限制载体低速、近似等纬度航行。近年来,随着国内捷联惯导精度的提高,在舰船等典型的长航时惯导领域捷联惯导已开始逐步取代平台惯导。对捷联惯导综合校正方法的研究成为当前长航时捷联惯导系统研究的热点之一[7~10]。借鉴传统的平台惯导综合校正方法,也可以完成捷联惯导综合校正,但同样存在着需限制载体航行状态的问题。而采用曲线拟合的方式进行综合校正,则对外信息频率要求较高[7]。
针对上述问题,本文提出了基于位置和航向信息的长航时捷联惯导系统综合校正新方法。利用惯性坐标系下的ψ方程以及ψ角与观测量(位置误差和航向误差)之间的关系,建立陀螺漂移与观测量之间的关系,从而通过两次不定期的外观测信息估算出对捷联惯导误差进行修正并估算出陀螺漂移,并且不需要对载体运动状态进行限制。
2 坐标系以及各矢量角的定义
为了方便后文推导,首先定义以下四个坐标系:
1)导航坐标系(n系):采用东-北-天地理坐标系。
2)计算机坐标系:坐标原点在捷联惯导系统所计算出来的经纬度上(定义为c点),而各个坐标轴的指向与c点的地理坐标系相一致。
3)计算导航坐标系:惯导系统所模拟的地理坐标系。由于系统误差的存在,导致其与地理坐标系的坐标轴存在偏差角。
4)OEPQ 坐标系(o系):原点O在运载体所在点p上,E轴与纬度圈相切,指向东。P轴平行于地球极轴,Q轴在纬度圈平面内与极轴垂直构成右手坐标系。OEPQ 坐标系的特点是地球自转角速度在E、Q轴上的分量都等于零。

图1 计算机坐标系与导航坐标系之间关系
各坐标系之间的矢量角定义如下:
Φ表示计算导航坐标系与导航坐标系之间的矢量角,标志了惯导系统相对地理坐标系的水平和方位误差角。

δθ计算机坐标系与导航坐标系之间的矢量角,定义为位置误差角。

ψ计算导航坐标系与计算机坐标系之间的矢量角。根据以上定义可以看出[2]:

3 传统综合校正方法局限性分析
传统的综合校正方法是把ψ方程投影到OEPQ 坐标系上[10]:

其中:ωin=ωie+ωen,ωen为载体运动产生的相对于地球的角速度;εo=[εeεpεq]T,为陀螺漂移在OEPQ 坐标系下的投影;ψo=[ψeψpψq]T,为ψ在OEPQ 坐标系下的投影。
对于捷联惯导系统:


根据式(4)和式(5),可得ψo在tn时刻和tn+1时刻有如下关系:

显然,如果式(6)有解析值,则可获得εb与ψo之间的解析关系,进而利用ψo与位置误差和航向误差的关系[2],求解出εb,完成陀螺漂移的估算。但是,在实际使用中,很难获取连续、准确的载体速度,因此ωin不能实时获得,使得式(6)中f(t)无法求解。因此,传统的综合校正中,通常要求载体低速航行,使得ωin≈ωie=15.04107°/h,则ωin可用ωie代替。且在综合校正中,不应要求外部导航设备提供连续的位置信号,从而导致无法 求解。为此,通常在综合校正中载体保持纬度基本不变,即为常值矩阵。
综上所述,传统的综合校正方法要求载体低速、近似等纬度航行,大大降低了综合校正的实用性。
4 捷联惯导系统的综合校正方案
4.1 惯性系下ψ 方程的建立
ψ方程在惯性坐标系下的投影为

其中:εi为陀螺漂移在惯性系的投影;为载体坐标系相对于惯性坐标系的转换矩阵,可由陀螺输出实时获得:

其中:为陀螺输出;初值(tn)由式(8)确定:

其中:(tn)是由捷联惯导系统实时计算得出;任意时刻的(t)为

其中:纬度L和经度λ可由tn时刻GPS提供。
通过式(7)建立起了捷联惯导系统的陀螺漂移与惯性系下ψ角之间的关系。对比式(4)、式(6)和式(7)可以看出将ψ方程投影到惯性系后,可以直接建立起ψ角与陀螺漂移之间的关系,而不用考虑地球自转和由载体运动引起的角运动,因此不必要限制载体的速度。而且为了求解任意时刻的(t)只需要获得其初值(tn)和陀螺输出,因此不需要载体等纬度运动的假设。通过以上分析可以看出,基于式(7)的捷联惯导系统综合校正不需要传统综合校正算法对载体运动状态的限制,提高综合校正的使用范围。
对式(7)求解可得出:

取任意两时刻tn和tn+1,根据式(14)可以得出:

其中:ψi(tn+1|tn)为陀螺误差产生的ψi增量:

通过式(13)建立起惯性坐标系下的ψi增量与陀螺漂移之间的关系。
4.2 基于位置和航向信息的捷联惯导系统的综合校正的实现
根据平台式惯导系统两点校方案思路,首先需要控制捷联惯导系统工作在水平阻尼状态。文献[12]提出实时调整阻尼参数的自适应控制方法可以改善惯性导航系统的动态性能,而文献[13]对于平台式惯导系统外水平阻尼状态进行了误差分析,指出由于舰船机动会导致冲击误差,从而会产生平台水平失调角,但是这一失调角也是在角秒量级。这一结论同样适用于捷联式惯性导航系统,因此对于以下的近似分析没有影响。
当系统稳定后,捷联惯导系统的水平误差角φx和φy仅取决于东向和北向的加速度计零偏。一般高精度的惯导系统加速度计零偏优于1×10-4g,所以φx和φy一般小于0.5角分,可以忽略不计,即φx≈0,φy≈0。
根据式(3)有:

通过GPS和天文导航系统等外部辅助设备,可以取得准确的纬度L、经度λ和航向K,因此惯导系统的定位和航向误差为

其中:Lc、λc和Kc分别为捷联惯导系统的计算纬度、计算经度、计算航向。
由式(2)、式(17)和式(18)可以推导出:

其中:P(t)=[δLδλδK]T;ψn=

而ψn(t)=(t)·ψi(t),所以有:

根据式(20)分别计算ψi(tn)和ψi(tn+1),并带入式(15)中可以得出:

在第一个观测点取得P(tn),用P(tn)对捷联惯导系统进行重调,即分别将捷联惯导系统的Lc、λc和Kc改为L、λ和K。则重调之后的代入式(21)有:

将式(16)代入到式(22),并整理得:

通过式(23),建立起捷联惯导系统的陀螺漂移εb与观测量P之间的关系,因此,只要得到两次观测量P(tn)和P(tn+1),就可计算出捷联惯导系统的陀螺漂移,进而对其进行补偿。
5 仿真验证
为了验证算法的有效性,对该算法进行了仿真。主要仿真条件如下:
1)假设在风浪影响下,舰体的航向角、纵摇角和横摇角运动规律为

2)假设载体速度为

3)惯性器件精度设为:陀螺常值漂移均为0.01°/h,随机游走为0.002°/,加速度计零偏均为10-4g;
4)外参考信息精度:北向和东向位置误差均为[-10m,10m]的白噪声;方位误差δKr为[-0.003°,0.003°]的白噪声。
共进行30次样本的综合校正实验。每次校正耗时4个小时,在tn时刻进行第一次重调,在4小时后的tn+1时刻进行校正。在综合校正期间,捷联惯导系统工作在水平阻尼方式,水平阻尼的参数设定与文献[1]中相同。以计算出的陀螺漂移精度作为衡量综合校正性能的指标。仿真结果如下所示。

图2 X 轴陀螺漂移计算值
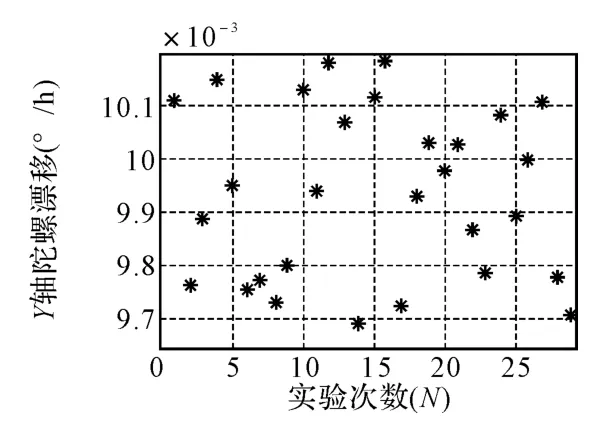
图3 Y 轴陀螺漂移计算值

图4 Z轴陀螺漂移计算值
三个轴的陀螺漂移统计值如表1所示。

表1 陀螺漂移统计值
通过以上条件的设置可以看出载体是以较大速度向南行驶,在校准的4 小时内,纬度变化了5.178°(约311nmile),通过表1可以看出X 轴陀螺漂移的计算均值误差为4%,Y 轴和Z轴陀螺漂移的计算均值误差为1%,计算误差较小,精度较高。
仿真结果初步验证了该算法不需要限制载体低速等纬度航行,而且对捷联惯导系统的陀螺漂移计算精度较高。
6 试验验证
本试验采用离线分析的方法。提供准确的航向信息的理想设备是星光导航装备,但试验中由于缺少星光导航设备,因此采用Ixsea公司的PHINS与GPS组合作为位置和航向基准(其位置精度约为10m,航向精度优于0.02°),由于航向基准精度较低,故选用一套精度较差的光纤陀螺捷联惯导系统(陀螺漂移优于0.01°/h,加速度计零偏约为10-4g)作为参试设备。试验时将光纤陀螺惯导系统与PHINS固定在刚性较好的铝合金板上,采集二者的数据,并在静态条件下,多次测定二者之间的固定安装偏差,在离线分析时对固定安装偏差进行补偿。光纤陀螺惯导系统在初始对准结束后进入水平阻尼工作状态。
离线分析时选择在第8小时进行第一次重调,在第14小时进行第二次重调并进行陀螺漂移的估算与补偿。
由于实际系统的陀螺漂移无法得知,不能够将陀螺漂移的估算值来判断算法是否有效,而当惯导系统工作在水平阻尼状态时,惯导系统的速度误差与位置误差主要是由陀螺漂移产生[1],因此可以将惯导系统的位置误差大小作为衡量综合校正精度的指标。图6给出了综合校正前后惯导系统的定位误差曲线。

图6 捷联惯导系统的定位误差曲线
通过综合校正前后捷联惯导系统的定位误差曲线可以看出,对惯导系统进行综合校正补偿后,定位误差比未进行综合校正时显著减小,未经补偿时的最大定位误差达到了18海里左右,补偿后定位误差在5海里左右,表明本文提出的综合校正算法应用在捷联式惯导系统中是可行的,并且能够提高惯导系统的长期定位精度。由于航向基准精度较低,因而估算出的陀螺漂移精度稍差,如果利用星光导航提供航向基准,则综合校正精度有可能更高。需要指出的是,在对陀螺漂移的估算方面,综合校正估算出的是陀螺漂移与随机游走之和,但通常随机游走比陀螺漂移低一个量级,因此可近似认为估算出来的陀螺误差即为陀螺漂移。
7 结语
本文利用平台惯导系统两点校思路,首先推导了惯性系下ψ方程,通过理论分析表明,惯性系下ψ方程与载体运动状态和纬度的变化无关,因此可以避免传统两点校方法限制载体低速等纬度运动,通过ψ角增量与观测量之间的关系,进一步建立起陀螺误差与观测量之间的关系。使用外部位置和航向参考信息,通过两次重调,即可计算出捷联惯导系统的陀螺漂移。仿真和试验结果证明该算法不需要限制载体的运动状态,对陀螺漂移的计算精度较高。
[1]黄德鸣,程禄.惯性导航系统[M].北京:国防工业出版社,1986:82-88,109-113,175-183.
[2]W.E.BENSO,R.M.DUPLESSIS.Effect of Shipboard Inertial Navigation System Position and Azimuth Errors on Sea-Launched Missile Radial Miss[J].IEEE Transactions on Military Electronics,1963,7(1):45-56.
[3]B E BONA.Optimum Reset of Ship's Inertial Navigation System[J].IEEE Trans.on Aerospace and Electronic Systems,1966,2(4):409-414.
[4]于堃,李琳,刘为任,等.舰船惯性导航系统海上无阻尼状态的校准[J].中国惯性技术学报,2008,1(6):637-642.
[5]邓太光,杨晓东.一种平台式惯导系统两点校方法的改进[J].控制工程,2011,18(S1):23-26.
[6]杨晓东,邓太光.平台式惯导系统两点校的常值误差分析[J].交通运输工程学报,2011,11(3):100-104.
[7]冯培德,李魁,王玮,等.一种新的舰载惯导系统综合校正方法[J].中国惯性技术学报,2011,19(4):427-435.
[8]王超,朱海,高大远.单轴旋转惯导系统转轴陀螺常值漂移综合校正方法[J].中国惯性技术学报,2012,20(4):421-424.
[9]万德钧,汪泳江.捷联航姿系统中陀螺随机常值漂移的校正[J].南京工学院学报,1988,18(3):76-85.
[10]张仲毅,徐烨烽,李魁,等.长航时惯导系统的随机游走误差传播规律及抑制方法[J].系统工程与电子技术,2011,33(9):2050-2054.
[11]李魁,王玮,刘芳,等.长航时惯导系统全阻尼综合校正算法[J].仪器仪表学报,2012,33(3):543-548.
[12]刘为任,庄良杰.惯性导航系统水平阻尼网络的自适应控制[J].天津大学学报,2005,38(2):146-149.
[13]邓太光,杨晓东.平台式惯导系统外水平阻尼状态的误差分析[J].电光与控制,2011,18(11):96-100.