具有同步发电机特性的微电网逆变器控制
2014-11-15张玉治贺大为柴建云
张玉治 张 辉 贺大为 苏 冰 柴建云
(1. 西安理工大学自动化学院 西安 710048 2. 西安交通大学电力设备电气绝缘国家重点实验室 西安 710049 3. 清华大学电机工程与应用电子技术系 北京 100084)
1 引言
目前,微电网中新能源发电如风力发电和光伏发电带有很强的随机性,通过配置电力储能装置,可以将这些能源变为可调度的发电单元,但连接电力储能装置和电网之间的电力电子变换器与常规的同步发电机存在着较大的差异,比如大多以电流源形式接入电网,仅向电网注入随机的能量,不参与电网性能指标的调节等[1-6]。因此,如何改善新能源电站对电网呈现的稳态和动态接入特性,对将来新能源大规模发电具有较大的意义。
同步发电机在电力系统中具有稳定电压、平衡功率的重要作用。文献[7]通过测量与电网的公共连接点处的电压,实时计算相电流,以此作为参考电流使逆变器以电流源的形式连接到电网中去。文献[8-11]研究了含有二阶同步发电机模型的控制算法,实现了一次及二次调频特性,但对系统的动态响应性能、转动惯量等参数的选择方法及控制器参数的优化设计未作进一步研究,同时输出特性是否与实际同步发电机特性相吻合也未体现。
论文的工作主要是研究微电网逆变器控制算法使其具有常规同步发电机输出特性。论文假定直流侧为电压恒定的新能源发电储能装置,设计了具有虚拟同步发电机(Virtual Synchronous Generator,VSG)特性的逆变器控制策略,构建了虚拟同步发电机实验平台。在此控制策略下,新能源电站具有同步发电机的自平衡能力、大转动惯量、下垂控制特性等特点,大大减少微电网与常规发电站的差异,提高新能源电站可靠性。
2 同步发电机的数学模型
2.1 同步发电机的本体模型
考虑实际分析与实现难易,同步发电机模型应作不同程度的简化。模型太简单,反映不出电机的相关特性,模型太复杂,会增加分析和控制的难度。论文采用dq坐标系下同步发电机的五阶电压方程、磁链方程建立VSG本体模型,其Park方程可分别为[12,13]

式中 L——电感;Mij——互感;p——算子,p =d/dt;ω——同步角速度。
ud、uq、ue、uD、uQ分别为 d轴绕组、q轴绕组、励磁绕组、d轴阻尼绕组、q轴阻尼绕组的电压;ψd、ψq、ψe、ψD、ψQ分别为 d轴定子、q轴定子、励磁绕组、d轴阻尼绕组、q轴阻尼绕组的磁链;id、iq、ie、iD、iQ分别为d轴定子、q轴定子、励磁绕组、d轴阻尼绕组、q轴阻尼绕组电流;Rd、Rq、Re、RD、RQ分别为 d轴定子、q轴定子、励磁绕组、d轴阻尼绕组、q轴阻尼绕组电阻。
2.2 同步发电机转子机械特性
同步发电机转子机械特性方程可由式(3)表示为[12,13]

式中 Tm,Te——机械转矩和电磁转矩;Pm,Pe——机械功率和电磁功率;D——定常阻尼系数;θ——电角度;Δω——电角速度差,Δω=ω-ωn;ω,ωn——实际电角速度和额定电角速度,极对数为np,则机械角速度ωm=ω/np。
算法中的机械转矩、转动惯量、dq轴上的定子阻抗、阻尼绕组阻抗、励磁绕组阻抗、电角速度以及感应电动势等参数与真实同步发电机相应参数的物理意义是相同的,可以根据实际情况,合理选择功率相匹配的实际同步发电机参数作为该控制算法的参数。
2.3 控制策略[12,13]
图1为同步发电机的控制器调节特性,分为原动机控制与励磁控制。

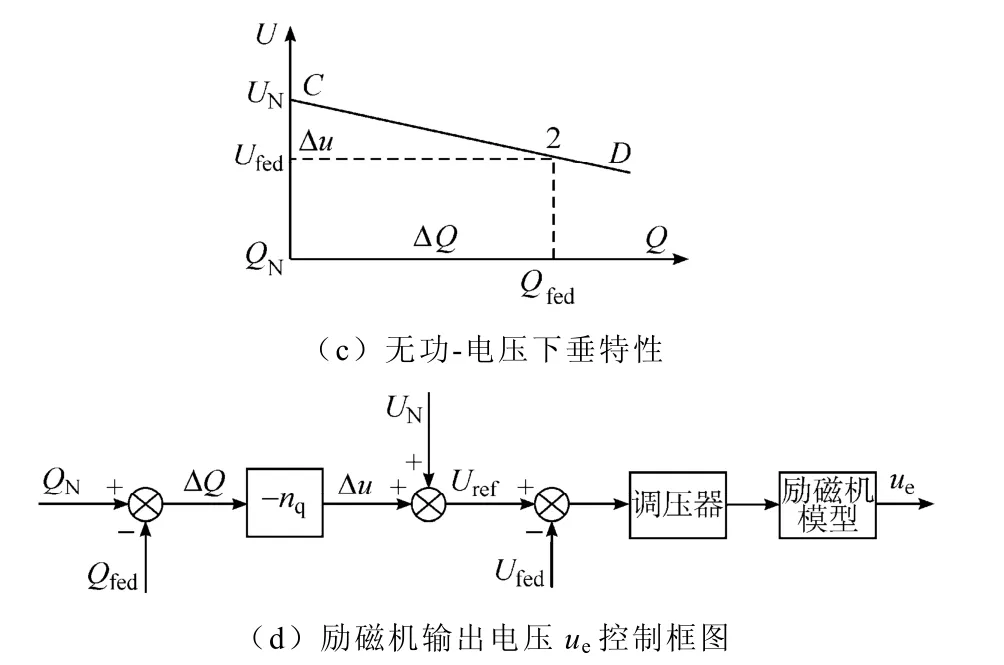
图1 VSG的原动机和励磁机调节器Fig.1 The controller of prime motor and exciter of VSG
2.3.1 同步发电机原动机控制
图 1a表示的是同步发电机的有功-频率下垂特性,以同步发电机的额定频率fN为基准值,当负载有功功率增大到 Pfed,则同步发电机的输出频率下垂到fref这个新的稳定值上,AB的斜率称为同步发电机的静态调差系数,也叫有功-频率下垂系数mP,且 mP=–Δf/ΔP,Δf=fref–fN,ΔP=PN–Pfed。在同步发电机并联运行时,各发电机动态调整各自的频率和功率,最后与负荷功率平衡,稳定在同一频率工作点。如果容量相同,则mP相同,输出功率相同;容量不同,则容量较大,mP就较大,通过下垂控制承担的输出功率也就越多。
通过对同步发电机调速装置的分析,可以把功频调节特性应用于逆变器虚拟同步发电机中调节有功功率和频率,具体控制框图如图1b所示。
图1b中,fN是VSG空载时输出频率,期望功率 PN与新能源电站出口处的有功功率 Pfed进行比较,查询图 1a有功-频率下垂特性,可以得到此时的频率变化量 Δf,Δf与 fN的和组成一个新的参考频率fref,再与实时反馈频率ffed进行比较,得到的误差经过调速器调节和原动机模型方程得到期望的虚拟机械功率Pm,其中调速器为PI调节。
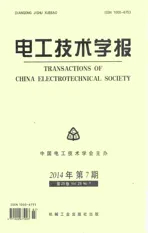
2.3.2 同步发电机励磁控制
图 1c中 CD的斜率,称为同步发电机的无功-电压下垂系数nq,反映无功功率的增量与发电机端电压偏差的关系,且 nq= –Δu/ΔQ,Δu=Uref–UN,ΔQ=QN–Qfed。对同步发电机励磁装置的分析可以得到其励磁控制框图如图1d,经测量环节与调差环节计算得到的参考电压 Uref与发电机端电压 Ufed进行比较,调压器设计为PI调节,使发电机端电压迅速准确跟踪电压指令。
3 虚拟同步发电机结构及控制算法
虚拟同步发电机的结构框架如图2所示,主电路为三相全桥逆变电路,控制器核心为基于 dq坐标系的虚拟同步发电机控制算法。
图3为虚拟同步发电机控制算法的建立过程[9,11]。将三相坐标系下的同步发电机电气方程变换到 dq坐标系下,得到同步发电机的电压和磁链方程式(1)、式(2),建立基于dq坐标系的虚拟同步发电机本体模型。模型的输入量为定子的dq轴电流id和iq,励磁电压ue,以及同步发电机的角速度ω,输出量为定子的 dq轴电压 ud和 uq。原动机调节如2.3.1节所述,决定了同步发电机模型从abc坐标系变换到dq坐标系所需电角度的大小,也决定了逆变器发出功率的多少;励磁调节如2.3.2节所述,使同步发电机的端电压幅值保持在允许范围内。在微电网逆变器中加入虚拟同步发电机控制算法,能够有效模拟同步发电机的转子机械特性和定子电气特性,使微电网逆变器对外表现出同步发电机特性,实现调频调压。

图2 虚拟同步发电机的结构框架Fig.2 Configuration of VSG
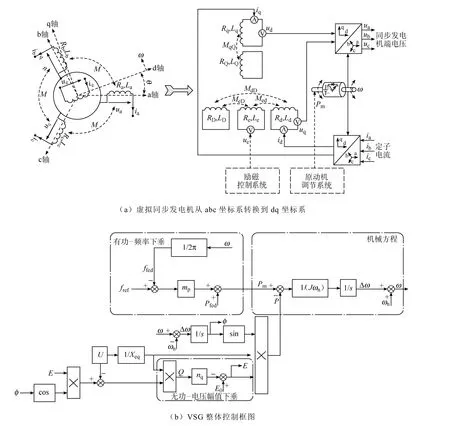
图3 虚拟同步发电机坐标变换和控制框图Fig.3 Coordinate conversion and control diagram of VSG
论文建立了VSG转子机械方程的小信号模型,对动态稳定性进行分析。VSG整体控制框图如图3b所示,其中同步发电机输出有功功率P和无功功率Q可由式(4)表示。

式中 E,U——为内电势和母线电压幅值;φ——功角,极对数设为1。
对式(3)和式(4)进行线性化,得到关于变量ˆφ的VSG小信号方程如式(5)

方程中各系数如下:

式中 ωc——滤波器截止频率;Qq——品质因数;Xeq——VSG等效电抗。
设置稳态工作点为:mp=0.000 01,nq=0.05,φ=0.17rad,J=0.092 3kg·m2,下面分析各参数对系统稳定性的影响。
(1)有功下垂系数 mp对系统稳定性影响。保持其他参数不变,当有功下垂系数在0.000 001≤mp≤0.01范围内变化时,特征方程的极点λ变化情况如图4a所示。两个共轭极点对系统的稳定性起主要作用,因此后续的分析都仅考虑共轭极点对系统稳定性的影响。由图4a还可知,随着mp的增大,主导极点靠近虚轴,在mp=0.000 5时一对共轭极点越过虚轴,此时系统不稳定。从物理意义上来说,有功-频率下垂系数增大,输出功率调节过快,系统稳定性下降。
(2)无功下垂系数 nq对系统稳定性影响。保持其他参数不变,当无功下垂系数在0.000 1≤nq≤0.5范围内变化时,特征方程的极点变化情况如图4b。当下垂系数逐渐增大时,一对共轭极点逐渐远离实轴,系统阻尼系数逐渐减小,造成动态过程的响应时间增加,响应超调量变大,在进行功率调节时,对系统的动态响应显然是不利的。
(3)功角φ对系统稳定性影响。保持其他参数不变,当功角在 0≤φ≤1.67rad范围内变化时,特征方程的极点变化情况如图 4c所示。随着φ的增大,主导极点的阻尼系数增大,超调量随之变大,稳定性变差。在实轴分离点之后,一个根逐渐接近原点,在φ≈1.57rad时极点出现在临界稳定线上,这与同步发电机的静态稳定性类似。
(4)转动惯量J对系统稳定性影响。保持其他参数不变,当转动惯量在0.05≤J≤1.5范围内变化时,特征方程的极点变化情况如图4d所示。随着J的增大,主导极点越靠近原点,说明衰减变慢,动态性能变差,因此J不能设置太大。

图4 小信号模型仿真结果Fig.4 The simulation results of small-signal model
4 单台VSG带阻感负载仿真分析
VSG的额定容量10kVA,额定输出电压380V/50Hz,设有功-频率下垂系数为 0.000 01,无功-电压下垂系数为0.00 5,滤波电感Lfi=0.1mH(i=a,b,c),滤波电容Cfi=20μF,VSG本体模型参数设置见下表。VSG在0.35s前处于空载状态;0.35s突加入22Ω负载,0.55s再突加感性负载15mH,0.85s仿真结束。仿真结果如图5所示。

表 VSG本体参数设置Tab. Parameters for VSG

图5 单台VSG变载仿真波形Fig.5 The Simulation waveforms of single VSG with load changing
0.35s时刻,突加有功负载,由于负载无功功率没有变化,那么输出电压幅值也应没有变化,而负载电流的变化引起虚拟同步发电机同步电抗分压的变化,负载电流增大,同步电抗电压增大,故需增大励磁电压,调整原动机输出的机械功率,使系统平衡。根据同步发电机的功频调节特性,0.35s时刻增加5kW阻性负载,且有功-频率下垂系数为0.000 01,即频率下垂0.05Hz即为49.95Hz;同理根据同步发电机励磁调节特性,在 0.55s时刻,有功功率维持不变,无功功率突增 1kvar,根据设定的无功-电压下垂系数0.005,输出相电压幅值应下垂5V,另外,由于电压幅值的下垂,在阻性负载不变的情况下,会略降低有功功率输出,也使频率微小地升高,不过这些变化均在合理的范围之内,遵循下垂特性。
5 VSG单机实验验证
实验平台由不控整流电路、逆变桥、阻性感性负载构成。不控整流电路代替电力储能装置,为逆变电路提供稳定的直流源。控制器以 TMS320F2812 DSP为核心,对有功功率、无功功率、电压幅值和频率进行观测。实验VSG的额定容量为5kVA,额定输出相电压 100V/50Hz,有功-频率下垂系数mp=0.000 8,无功-电压下垂系数nq=0.05,逆变输出的滤波电感Lfi=3mH,滤波电容Cfi=10μF,VSG本体模型参数依旧(见表)。
5.1 突加阻性负载
VSG初始状态为空载;某一时刻突增22Ω阻性负载。实验电压电流波形如图6a所示。


图6 单台VSG突加阻性负载实验波形Fig.6 The experimental waveforms of single VSG with resistive load increasing
VSG开始时空载,由于励磁调节作用,输出相电压幅值稳定在100V,突加阻性负载瞬间,由于负载无功功率没有变化,则输出电压幅值也应没有变化,但负载电流的增大引起虚拟同步发电机同步电抗分压的增大,故需增大励磁电压,调整原动机输出的机械功率,稳定输出频率。图 6b中突加 22Ω的阻性负载后,VSG输出有功功率约为640W,已知有功-频率下垂系数为 0.000 8,则理论上频率应下垂 0.512Hz,实际频率下垂约 0.5Hz到 49.5Hz,与理论计算基本吻合。图6c表明突加负载时相电压幅值有微小的降低,通过虚拟励磁调节迅速回升到100V。虽然 VSG的阻性负载突增了,但由于有励磁调节,输出电压幅值保持不变;原动机输出的机械功率与负载有功功率平衡,输出电压幅值随着负载增大而增大;同时,VSG输出频率的大小遵循有功-频率下垂特性,频率的变动范围保持在合理的变化范围之内。
5.2 突加感性负载
在恒定加载 22Ω阻性负载基础上,再突加10mH感性负载,实验波形如图7所示。


图7 单台VSG突加感性负载实验波形Fig.7 The experimental waveforms of single VSG with reactive load increasing
突加感性负载瞬间,系统无功功率增加了95var,已知无功-电压下垂系数为 0.05,则理论上相电压幅值下垂4.75V,图7b相电压幅值下垂了约5V即为95V,与理论计算基本吻合,说明实际调节遵循无功-电压下垂特性曲线;图 7c由于电压幅值的下垂,在阻性负载不变的情况下,频率有微小的升高,这些变化均在合理的范围之内,遵循着有功-频率下垂特性。
6 结论
论文研究了具有VSG特性的逆变器控制策略,仿真和实验表明采用虚拟同步发电机算法及其调节建立的逆变器虚拟同步发电机能够模拟实际同步发电机的输出特性,即电压源输出特性、电压幅值和频率下垂特性。对于虚拟同步发电机控制器参数选择,通过小信号建模进行了合理优化,与实际同步发电机相比,VSG的同步电抗、阻尼系数、转动惯量等参数可以根据实际合理配置,无需硬件上调整。
[1] Johan Morren, Sjoerd W H, De Haan, et al.Contribution of DG units to primary frequency control[C]. International Conference on Future Power Systems, 2005: 1-6.
[2] A European strategy for sustainable, competitive and secure energy[M]. Brussel:Commission of the European Communities, 2006.
[3] 韦刚, 吴伟力, 胡丹云, 等. 分布式电源及其并网时对电网的影响[J]. 高电压技术, 2007, 30(1): 36-40.Wei Gang, Wu Weili, Hu Danyun, et al. Distributed generation and effects of its parallel operation on power system[J]. High Voltage Engineering, 2007,30(1): 36-40.
[4] 陈达威, 朱桂萍. 低压微电网中的功率传输特性[J].电工技术学报, 2010, 25(7): 117-122.Chen Dawei, Zhu Guiping. Power transmission characteristics of low voltage microgrids[J].Transactions of China Electrotechnical Society, 2010,25(7): 117-122.
[5] Majumder R, Ghosh A, Ledwich G, et al. Power management and power flow control with backto-back converters in a utility connected microgrid[J].IEEE Transactions on Power Systems, 2010, 25(2):821-834.
[6] Kroposki B, Lasseter R Ise T, Morozumi S, et al.Making microgrids work[J]. IEEE Power and Energy Magazine, 2008, 6(3): 40-53.
[7] Beck H P, Hesse R. Virtual synchronous machine[C].The 9th International Conference on Electrical Power Quality and Utilization, 2007: 1-6.
[8] Yang Xiangzhen, Su Jianhui, Ding Ming, et al.Control strategy for virtual synchronous generator in microgrid[C]. The 4th International Conference on Electric Utility Deregulation and Restructuring and Power Technologies, 2011: 1633-1637.
[9] 丁明, 杨向真, 苏建徽. 基于虚拟同步发电机思想的微电网逆变电源控制策略[J]. 电力系统自动化,2009, 33(8), 89-93.Ding Ming, Yang Xiangzhen, Su Jianhui. Control strategies of inverters based on virtual synchronous generator in a microgrid[J]. Automation of Electric Power Systems, 2009, 33(8): 89-93.
[10] Farid Katiraei, Reza Iravani, Nikos Hatziargyriou, et al. Microgrids management[J]. IEEE Power and Energy Magazine, 2008, 6(3): 54-65.
[11] Qing Chang Zhong, George Weiss. Static synchronous generators for distributed generation and renewable energy[C]. IEEE/PES Power Systems Conference and Exposition, 2009: 1-6.
[12] 孙宏斌. 电力系统分析[M]. 北京: 清华大学出版社,2009.
[13] 孙旭东, 王善铭. 电机学[M]. 北京: 清华大学出版社, 2006.