康复机器人训练对脑卒中偏瘫上肢功能及神经电生理的影响
2014-11-08王会才
王会才,赵 凯,葛 玥
(安徽医科大学第一附属医院康复医学科,安徽合肥 230022)
脑卒中患者常伴有运动障碍、感觉障碍、言语障碍、认知障碍等,其中以运动功能障碍最常见。有研究表明,大约85%的脑卒中患者存在不同程度的上肢瘫痪,且上肢功能的恢复明显滞后于下肢,尤其手的精细功能。据统计结果显示,脑卒中6个月以后仍有30%~60%的偏瘫患者上肢功能不能恢复,而脑卒中后5年后仍有25%上肢严重瘫痪[1],这就进一步延长了患者的康复进程。目前,临床上常用的常规康复治疗手段(如作业治疗和运动疗法)治疗效果较慢,难以满足脑卒中偏瘫患者的康复需求,上肢康复机器人是近年来应用于脑卒中偏瘫患者上肢功能训练的新型康复医疗器械,它的出现不仅能够满足重复性、功能性、任务具体性的康复理论要求[2-3],而且在训练过程中充满了娱乐性,提高了患者对康复训练的积极性。国内外,上肢康复机器人已逐渐应用于治疗脑卒中患者偏瘫上肢,并且在临床应用上取得了一定的疗效,并且比常规康复治疗更有效[4-7]。本文旨在对存在上肢功能障碍的脑卒中患者分别给予上肢康复机器人辅助康复训练和常规康复训练,观察康复机器人对脑卒中偏瘫上肢功能恢复效果及神经电生理的影响,进一步探讨康复机器人改善脑卒中偏瘫上肢运动功能的作用机制。
1 资料与方法
1.1 一般资料 病例来源:2012年11月—2013年10月安徽医科大学第一附属医院康复医学科收住入院的脑卒中60例。纳入标准:(1)所有患者均符合全国第四届脑血管病学术会议脑血管病诊断标准[8],并经CT或MRI证实;(2)年龄20~70岁,病程≤6个月;(3)生命体征稳定,意识清醒,无语言、认知障碍;(4)患侧上肢:改良Ashworth分级<Ⅲ级,上肢肌力>2级;(5)同意参与并配合该临床研究。
排除标准:(1)不符合全国第四届脑血管病学术会议脑血管病的诊断标准;(2)改良Ashworth分级≥Ⅲ级或上肢肌力≤2级;(3)合并有肝、肾、造血系统、内分泌系统等严重疾病及骨关节病;(4)精神障碍或严重痴呆不能配合训练者;(5)病情不稳定者。按分层随机方法分为试验组和对照组,每组各30例,两组患者在疾病性质、年龄、性别、病程及偏瘫侧等方面差异无显著性意义(P>0.05),见表1。

表1 两组患者一般资料比较
1.2 训练方法 两组均给予常规肢体功能训练,包括运动疗法(PT)和作业治疗(OT)等。对照组给予常规肢体功能训练,包括PT和OT;试验组除给予常规肢体功能训练外,还进行上肢康复机器人治疗。两组患者每项治疗各进行30 min,每天1次,每周5次,疗程为4 w。
试验组所用上肢康复机器人为A2型肢体智能反馈训练系统(广州一康医疗设备有限公司),可进行肩关节屈曲、内收、外展,肘关节屈、伸,前臂旋前、旋后,手抓握训练。根据患者病情设定训练内容、训练难度、握力大小等参数,循序渐进,逐渐增加训练强度,根据患者功能恢复情况及实际情况,实时调整训练内容和训练强度,以满足患者的训练需求,根据由易到难的原则,逐渐完成从单关节或单项运动到多关节联合及分离运动。
1.3 评价方法 采用上肢康复机器人自带评估系统评价肩、肘、腕ROM及手握力、Lindmark评分量表评价上肢运动功能、肌电图仪评价上肢神经传导速度(上海诺诚电气有限公司NTS-2000型)。两组患者分别在训练前、训练2 w及训练4 w后三个时间点各接受评定一次,以上评定均由同一康复医师完成。
1.4 统计学分析 采用SPSS17.0统计软件分析,计量资料用均数±标准差(±s)表示,采用重复测量方差分析及t检验,并在分析前对资料做球型性检验,以HF法调整时间关联自由度;计数资料采用卡方检验,以P<0.05为差异有统计学意义。
2 结果
2.1 肩、肘、腕ROM及手握力评定结果 整体分析(重复测量方差分析)发现:组间比较、时间点间比较及分组与时间的交互作用均有显著性意义(P<0.05);再行精细比较:训练前两组患者的肩、肘、腕关节活动度及手握力评定差异无显著性意义(P>0.05);训练2 w后,实验组在肩外展、肩内收、肩前屈、肘屈、前臂旋前、前臂旋后上较训练前均有改善(P<0.05),在肩内收和手握力上较训练前均有显著改善(P<0.01),对照组肩、肘、腕ROM较训练前均无统计学差异(P>0.05),训练4 w后,试验组肩、肘、腕ROM较训练前均有显著(P<0.01),对照组在肩外展、肩前屈、肘屈、前臂旋前、前臂旋后上较训练前均有改善(P<0.05),在肩内收和手握力上较训练前均有显著改善(P<0.01);试验组和对照组相比,训练2 w后,试验组肩、肘、腕关节活动度及手握力较对照组无统计学差异(P>0.05),训练4 w后,试验组肩内收及手握力较对照组显著改善(P<0.01),试验组肩外展、肩前屈、肘屈、前臂旋前、前臂旋后较对照组也有改善(P<0.05),见表2。
2.2 Lindmark评分结果 整体分析(重复测量方差分析)发现:组间比较、时间点间比较及分组与时间的交互作用均有显著性意义(P<0.05);再行精细比较:训练前两组患者的Lindmark评分差异无显著性意义(P>0.05);训练2 w后,试验组较训练前有显著改善(P<0.01),对照组与训练前比较无统计学差异(P>0.05),训练4 w后,试验组和对照组评分较训练前均有显著改善(P<0.01);试验组和对照组相比,训练2 w后,试验组较对照组无统计学差异(P>0.05),训练4 w后,试验组较对照组有改善(P<0.05),见表3。
表2 两组肩、肘、腕ROM及手握力评定结果(±s)
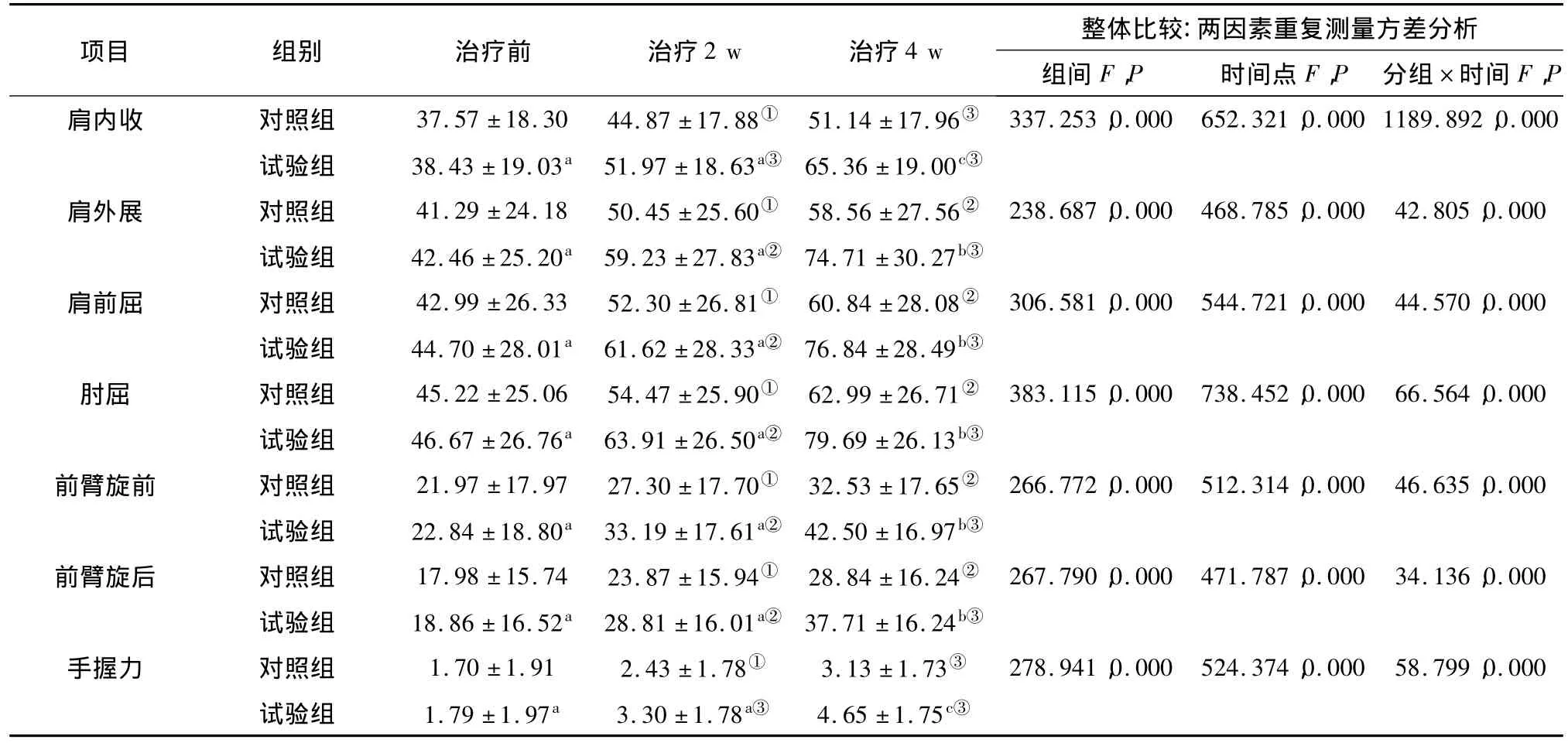
表2 两组肩、肘、腕ROM及手握力评定结果(±s)
注:组间比较:aP >0.05,bP <0.05,cP <0.01;组内比较:①P >0.05,②P<0.05,③P <0.01。
项目 组别 治疗前 治疗2 w 治疗4 w 整体比较:两因素重复测量方差分析组间F,P 时间点F,P 分组×时间F,P 0.000试验组 38.43±19.03a 51.97±18.63a③ 65.36±19.00c③肩外展 对照组 41.29±24.18 50.45±25.60① 58.56±27.56② 238.687,0.000 468.785,0.000 42.805,0.000试验组 42.46±25.20a 59.23±27.83a② 74.71±30.27b③肩前屈 对照组 42.99±26.33 52.30±26.81① 60.84±28.08② 306.581,0.000 544.721,0.000 44.570,0.000试验组 44.70±28.01a 61.62±28.33a② 76.84±28.49b③肘屈 对照组 45.22±25.06 54.47±25.90① 62.99±26.71② 383.115,0.000 738.452,0.000 66.564,0.000试验组 46.67±26.76a 63.91±26.50a② 79.69±26.13b③前臂旋前 对照组 21.97±17.97 27.30±17.70① 32.53±17.65② 266.772,0.000 512.314,0.000 46.635,0.000试验组 22.84±18.80a 33.19±17.61a② 42.50±16.97b③前臂旋后 对照组 17.98±15.74 23.87±15.94① 28.84±16.24② 267.790,0.000 471.787,0.000 34.136,0.000试验组 18.86±16.52a 28.81±16.01a② 37.71±16.24b③手握力 对照组 1.70±1.91 2.43±1.78① 3.13±1.73③ 278.941,0.000 524.374,0.000 58.799,0.000试验组 1.79±1.97a 3.30±1.78a③ 4.65±1.75c③肩内收 对照组 37.57±18.30 44.87±17.88① 51.14±17.96③ 337.253,0.000 652.321,0.000 1189.892,
2.3 上肢神经传导速度结果 整体分析(重复测量方差分析)发现:组间比较、时间点间比较及分组与时间的交互作用均有显著性意义(P<0.05);再行精细比较:训练前两组患者的上肢神经传导速度差异无显著性意义(P>0.05);训练2 w后,试验组较训练前均有改善(P<0.05),对照组与训练前均无统计学差异(P>0.05),训练4 w后,试验组较训练前有均有明显好转(P<0.01),对照组较训练前也均有改善(P<0.05);试验组和对照组相比,训练2 w后,试验组正中神经和桡神经传导速度较训练前均有改善(P<0.05),试验组尺神经传导速度与训练前无统计学差异(P>0.05),对照组较训练前均无统计学差异(P>0.05),训练4 w后,试验组上肢神经传导速度较对照组有好转(P<0.05),见表4。
表3 两组Lindmark评分(±s)

表3 两组Lindmark评分(±s)
注:组间比较:aP >0.05,bP <0.05,cP <0.01;组内比较:①P >0.05,②P<0.05,③P <0.01。
组别 治疗前 治疗2 w 治疗4 w 整体比较:两因素重复测量方差分析组间F,P 时间点F,P 分组×时间F,P对照组 10.47±9.26 15.47±9.37① 19.60±9.52③ 1310.285,0.000 2466.163,0.000 152.103,0.000试验组 10.23±9.43a 17.73±9.34a③ 25.40±9.43b③
表4 两组上肢神经传导速度结果(±s)
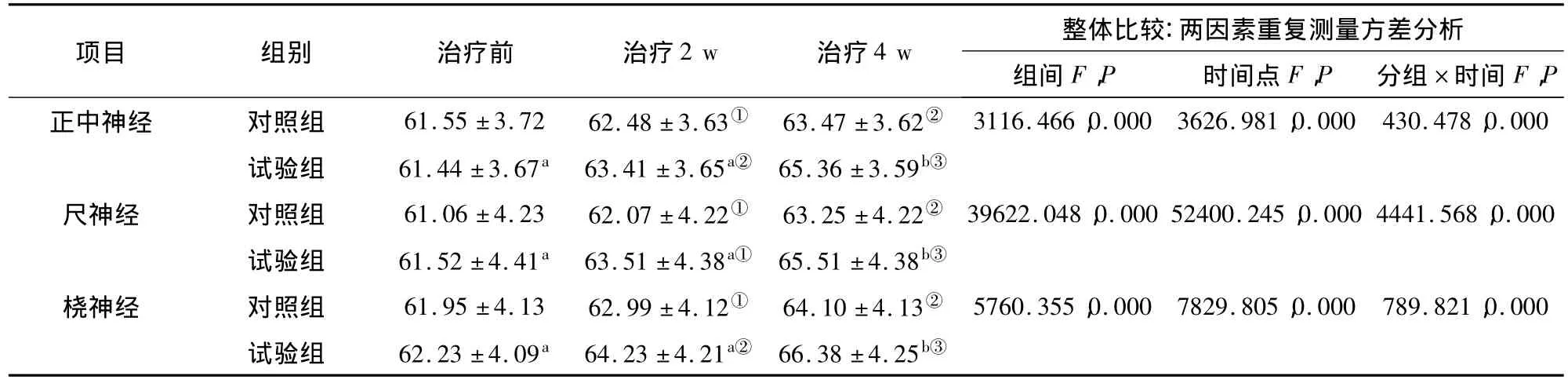
表4 两组上肢神经传导速度结果(±s)
注:组间比较:aP >0.05,bP <0.05,cP <0.01;组内比较:①P >0.05,②P<0.05,③P <0.01。
项目 组别 治疗前 治疗2 w 治疗4 w 整体比较:两因素重复测量方差分析组间F,P 时间点F,P 分组×时间F,P正中神经 对照组 61.55±3.72 62.48±3.63① 63.47±3.62② 3116.466,0.000 3626.981,0.000 430.478,0.000试验组 61.44±3.67a 63.41±3.65a② 65.36±3.59b③尺神经 对照组 61.06±4.23 62.07±4.22① 63.25±4.22② 39622.048,0.000 52400.245,0.000 4441.568,0.000试验组 61.52±4.41a 63.51±4.38a① 65.51±4.38b③桡神经 对照组 61.95±4.13 62.99±4.12① 64.10±4.13② 5760.355,0.000 7829.805,0.000 789.821,0.000试验组 62.23±4.09a 64.23±4.21a② 66.38±4.25b③
3 讨论
中枢神经系统结构和功能的可塑性或可修饰性是神经系统的重要特征,这种可塑性或可修饰性不仅表现在神经生长发育期,在成年期和老年期,中枢神经系统同样具有可塑性。在成年损伤后,神经回路和突触结构都能发生适应性的变化,这种变化会根据患者偏瘫侧肢体的运动功能进行重组。脑卒中后主要表现中枢神经损伤的症状,中枢神经系统与全身器官存在一定的相互关系,主要表现在中枢神经系统对全身器官的功能起调控作用,同时其紧张度和兴奋性又需要全身器官的信息不断反馈来维持。理论上讲,运动是中枢神经最有效的刺激形式,所有的运动都可向中枢神经系统提供感觉、运动和反射的传入,并能诱导大脑皮质重组,特定具体的康复训练任务能够加速脑卒中后运动再学习的过程[9]。一般来说,随着运动复杂性的增加,大脑皮质将建立暂时性的联系和条件反射,多次重复训练可以促进条件反射的建立,同样能够提高神经活动的兴奋性、灵活性和反应性。在康复训练过程中,通过功能性磁共振(fMRI)可以观察到大脑可塑性或可修饰性的连续变化,说明运动对大脑的功能重组和代偿也起重要的作用[10],这也被认为是中枢神经系统损伤后进行康复训练康复的理论基础。近年来,越来越多的临床实验证实了特定康复训练能够改善偏瘫患者的上肢运动功能,并能促进脑功能的重组[11-13]。
上肢康复机器人起源于美国,经过数年的临床经验并得以逐步改进,它对治疗脑卒中患者偏瘫上肢的疗效,也逐步得到了肯定,而且它完全能够满足高强度性、重复性、功能性和任务具体性的要求。在国内,上肢康复机器人A2型肢体智能反馈训练系统对脑卒中患者的治疗效果也得到了认同[14-17]。本试验表2、3结果显示了治疗4 w后两组患者的上肢功能均较治疗前改善,分别表现在肩、肘、腕ROM、手握力及Lindmark评分上,试验组和对照组相比,在治疗4 w后,试验组肩、肘、腕关节活动度及手握力及Lindmark评分较治疗前均有好转。由此得出,脑卒中偏瘫患者在经过常规康复运动训练后上肢功能得到改善,而上肢康复机器人结合常规康复运动训练可进一步改善脑卒中偏瘫患者的上肢功能,大大缩短康复时间。
神经电生理检查是神经系统检查的延伸,它在诊断及评估神经和肌肉病变时,起着非常关键的作用,同时也是康复评定的重要内容和手段之一。本试验表4结果表明对照组在训练后偏瘫上肢神经传导速度较训练前有改善,试验组较训练前改善明显,且在训练4 w后,试验组上肢神经传导速度的恢复较对照组明显,国内外也有学者证实了脑卒中结合上肢康复机器人的康复训练在肌电、动力学和运动功能改善上得到肯定[18-20]。综合本试验的结果,也间接提示了脑卒中偏瘫患者运动功能的恢复程度与上肢神经传导速度呈正相关。
综上所述,可以认为康复机器人是一个较为先进的设施,对于改善脑卒中患者偏瘫上肢的运动功能,提高偏瘫上肢周围神经的兴奋性,从而促进患者日常生活活动能力的恢复,具有重要的应用前景,值得临床推广使用。
[1] Muntner P,Garrett E,Klag MJ,et al.Trends in stroke prevalence between 1973 and 1991 in the US population 25 to 74 years of ages[J].Stroke,2002,33(5):1209-1213.
[2] Van Peppen RP,Kwakkel G,Wood-Dauphinee S,et al.The impact of physical therapy on functional outcomes after stroke:what’s the evidence?[J].Clin Rehabil,2004,18(8):833-862.
[3] Kan P,Huq R,Hoey J,et al.The development of an adaptive upper-limb stroke rehabilitation robotic system[J].J Neuroeng Rehabil,2011,8:33.
[4] Masiero S,Armani M,Rosati G.Upper-limb robot-assisted therapy in rehabilitation of acute stroke patients:focus review and results of new randomized controlled trial[J].J Rehabil Res Dev,2011,48(4):355-366.
[5] Burgar CG,Lum PS,Scremin AM,et al.Robot-assisted upper-limb therapy in acute rehabilitation setting following stroke:Department of Veterans Affairs multisite clinical trial[J].J Rehabil Res Dev,2011,48(4):445-458.
[6] Hsieh YW,Wu CY,Liao WW,et al.Effects of treatment intensity in upper limb robot-assisted therapy for chronic stroke:a pilot randomized controlled trial[J].Neurorehabil Neural Repair,2011,25(6):503-511.
[7] Mazzoleni S,Crecchi R,Posteraro F,et al.Robot-assisted upper limb rehabilitation in chronic stroke patients[J].Conf Proc IEEE Med Biol Soc,2013,7:886-889.
[8] 中华医学会第四届全国脑血管病学术会议.各类脑血管疾病诊断要点[J].中华神经科杂志,1996,29(6):379-380.
[9] Panarese A,Colombo R,Sterpi I,et al.Tracking motor improvement at the substask level during robot-aided neurorehabilitation of stroke patients[J].Neurorehabilil Neural Repair,2012,26(7):822-833.
[10] Tombari D,Loubinoux I,Pariente J,et al.A longitudinal fMRI study:in recovering and then in clinically stable sub-cortical stoke patients[J].Neuroimage,2004,23(3):827-839.
[11] Van Vliet P,Pelton TA,Hollands KL,et al.Neuroscience findings on coordination of reaching to grasp an object:Implications for research[J].Neurorehabil Neural Repair,2013,27(7):622-635.
[12] Pellegrino G,Tomasevic L,Tombini M,et al.Inter-hemispheric coupling changes associate with motor improvements after robotic stroke rehabilitation[J].Restor Neurol Neurosci,2012,30(6):497-510.
[13] Lew E,Chavarriaga R,Silvoni S,et al.Detection of self-paced reaching movement intention from EEG signals[J].Front Neuroeng,2012,5:13.
[14]梁天佳,吴小平,莫明玉.上肢康复机器人训练对偏瘫患者上肢功能恢复的影响[J].中国康复医学杂志,2012,27(3):254-256.
[15]梁天佳,吴小平,莫明玉.上肢康复机器人在脑卒中单侧空间忽略康复中的作用[J].中国康复理论与实践,2012,18(4):369-371.
[16]刘 震,张盘德,刘翠华,等.机器人治疗急性期脑卒中患者上肢功能的恢复[J].中国组织工程研究与临床康复,2011,15(52):9803-9807.
[17]龙耀斌.康复机器人训练对脑卒中偏瘫患者上肢功能的影响[J].中国康复,2012,27(3):171-173.
[18]孙 睿,宋 嵘,汤启宇.肌电控制康复机器人协助的脑卒中患者肘关节康复训练的多参数评价[J].中国康复医学杂志,2012,27(9):802-807.
[19] Liao WW,Wu CY,Hsieh YW,et al.Effects of robot-assisted upper limb rehabilitation on daily function and real-world arm activity in patients with chronic stroke:a randomized controlled trial[J].Clin Rehabil,2012,26(2):111-120.
[20] Song R,Tong KY,Hu X,et al.Myoelectrically controlled wrist robot for stroke rehabilitation[J].J Neuroeng Rehabil,2013,10:52.
