全站仪测量船体分段表面精度方法研究
2014-10-30刘玉亮郑绍春
白 冰,刘玉亮,郑绍春
(武汉理工大学交通学院,武汉 430063)
0 引 言
在船厂中,精度控制受到高度重视,然而在分段建造过程中,只对船体分段进行长、宽、高以及对角测量以保证精度,对于分段外表面一般不进行精度测量。板材加工时用样箱保证了每块板的形状规格,但是船体分段外表面是由许多块板材、型材焊接而成,在拼板焊接过程中会造成板的收缩、伸展等变形,使得建造船体分段外表面与设计的船体分段外表面有一定的误差,将对船舶的性能产生不利影响。对分段外表面进行测量,得到实际船体相对于设计船体的误差,有利于提高船舶建造精度和质量[1]。基于此,提出一种采用全站仪的对边测量法测量船体外表面形状的简易方法,并结合软件生成三维模型与设计的三维模型比较,检验船体分段外表面建造的精度。
1 测量原理
对边测量作为一种间接测量,主要根据相对测量原理,获取两个无法直接通视的测量点间距离和高差[2]。逆对边测量法是根据相对测量原理,已知基准点坐标,获取与此点高度差为Δh目标水线上一点的方法。
水线1为基准水线,水线间距为Δh,以水线1上各点为基准点,在对边测量模式下,调解全站仪V =Δh(V-测量起点和测量终点的垂向高度差),得到与水线1上基准点高度差为Δh的各点,这些点即为水线2上各点。例:在通视分段的任意O点放置全站仪,A点为水线1上一基准点,在全站仪对边测量模式下,仅调解V =Δh,得到 A1点,A1点即为水线2上的点(由于船体外表面的曲面变化,A、 A1的水平距离一般不为0),见图1。全站仪采用球坐标系,L1、 L2为实测平距,α、β为实测竖角,γ为A和 A1实测水平角,并已知A点的坐标要素:平距 L1,水平角θ,竖角α。则 A1点坐标:
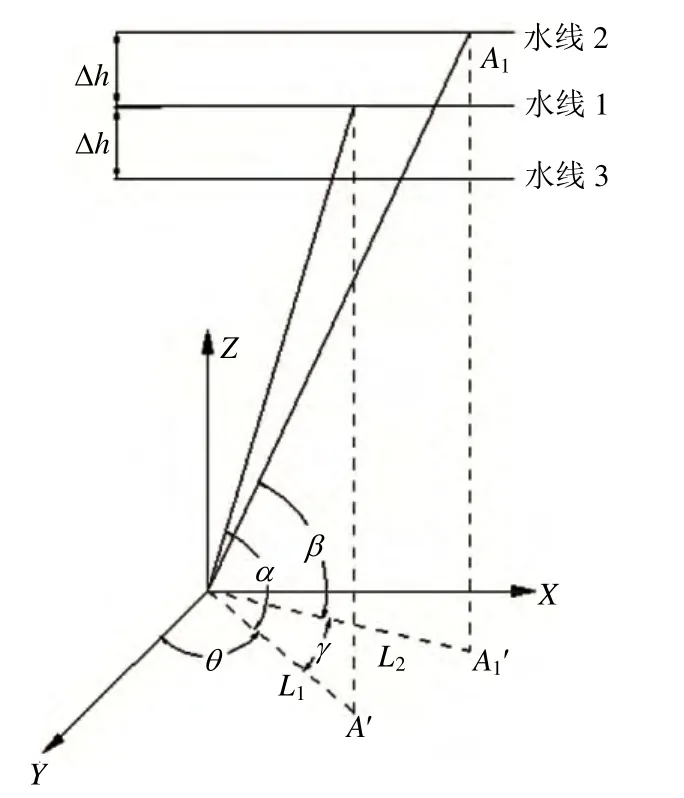
图1 测量原理

2 测量方法
全站仪测量船体分段外表面时依据对边测量模式,以基准水线上各点为基准点,依次进行垂直扫描,测量各水线上的点,并得到各点坐标。
2.1 全站仪位置
全站仪的位置要保证可以通视整个船体分段外表面。由于船首和船尾曲面变化较复杂,测量船首时,全站仪放置在船首偏前,测量船尾时,全站仪放置在船尾偏后。对于其他的船体分段外表面,全站仪放置只需保证通视外表面即可。整个测量过程中全站仪不发生位移。
2.2 测量步骤
1) 确定船体分段的基准水线,取分段上任意一条平行于设计水线的直线;
2) 用全站仪测得船体分段总长L,高度H。根据总长L在基准水线上选取X个基准点,则基准点间距为L/X,分别为点A, B, ……,根据高度H确定Y条水线,就可以得到水线间距H/Y;
3) 调整全站仪,测量基准水线上 A点的坐标值。在对边测量模式下,以A为基准点进行垂直扫描,调节全站仪使得V=H/Y,确定目标水线上位置点A1,记录A1的坐标值,继续调节V=H/Y,依次可得到A2, A3, ……所有水线上与A点的对应点作全过程测量,调节全站仪对准基准水线点 B,重复上述操作,扫描高度差仍为V=H/Y,得到 B1、B2、B3, ……的坐标值,按照同样的方法可以依次测出其他点的坐标(见图2)。
4) 在测量船体轮廓线时,采用全站仪距离模式,扫描船体轮廓线,得到船体轮廓线上各点的坐标。
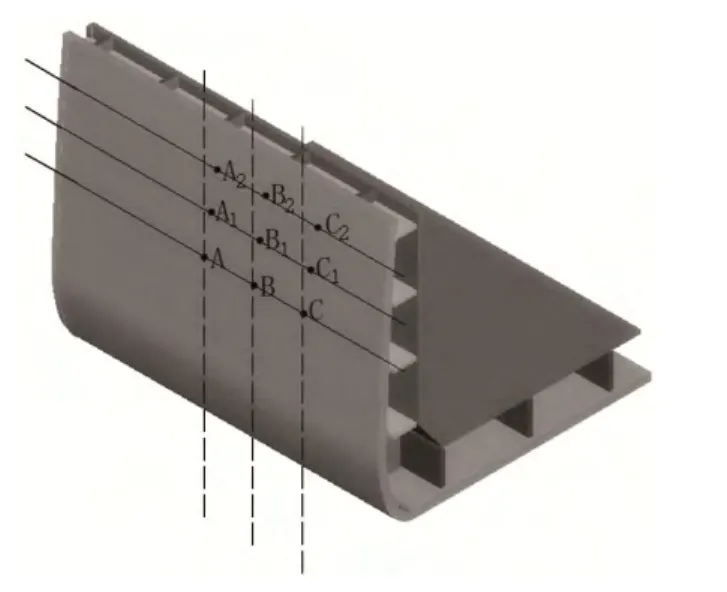
图2 分段测量点
2.3 数据采集
将测量到的数据记录到表1。

表1 数据记录
表中:L——全站仪照准部中心至测量点的水平距离;ZA——望远镜(目镜)中心垂向角度;HAR——望远镜(目镜)中心水平方位角。
2.4 数据处理
全站仪采用球坐标系,需将其测量的L、ZA、HAR坐标转换为直角坐标系的X、Y、Z坐标。将ZA、HAR转换成弧度,再将数据转换成分段上的点相对于全站仪的空间坐标:
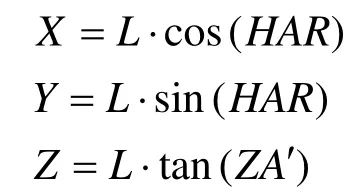
其中:ZA′=90°-ZA
HAR依据角度大小应用源数据或360°-HAR。
可用如表2的EXCEL编辑公式后进行处理,将得到的直角坐标导入3D-CAD中,生成船体分段的外表面[3],与设计分段外表面相比较,确定船体分段外表面的建造精度。
2.5 测量方法分析
1) 测量点A1, A2, ……与A点所在的横剖面一般不重合,这是由于调解V=H/Y得到目标水线上的点与基准水线上的点平距不等于 0,根本原因是船体表面曲度造成的。但这并不影响最终生成的三维模型和型线,因为从 A到 A1,B到B1, ……的垂向高度差相同,则A1, B1, ……在同一水线上,同理,A2, B2, ……也在同一水线上,即得到船体分段的水线;
表2 数据处理
2) 在测量过程中,测量点处于以全站仪为坐标原点所构建坐标系中,为保证测量数据正确,全站仪需定点测量;
3) 在船体分段外表面和轮廓线变化很大的地方,增加测量点的密集度,以准确地反映分段外表面的曲度变化。
3 结 语
全站仪逆对边测量法测量船体分段外表面,以基准水线上的点为基准点,调解高度差,进行垂直扫描,得到其他各水线上的测量点坐标,数据处理导入CAD中生成船体分段表面并得出型值,与设计分段表面和型值对比后,确定误差,有助于船厂据此对分段进行精加工,提高分段建造精度,保证造船质量。用此方法测量时,全站仪定点测量无需移动,操作简单、快捷,在船厂运用的可行性良好。
[1] 甘水来. 精益管理在船舶产品开发中的应用研究[J]. 上海造船,2011, (3): 75-78.
[2] 韩伟信. 浅谈全站仪对边测量原理[J]- 测绘与空间地理信息,2010, (4).
[3] 管 官,申 梅,林 焰,纪卓尚. 船体分段测量点数据与CAD模型自动匹配方法研究[J]- 哈尔滨工程大学学报2011, (9).