复合控制导弹的模糊控制算法及实现
2014-10-25史震马文桥张玉芳林强
史震,马文桥,张玉芳,林强
(1.哈尔滨工程大学自动化学院,黑龙江哈尔滨150001;2.空军航空大学航空理论系,吉林长春130022)
随着科学技术的发展,反舰导弹以及各类搭载精确制导武器的战斗机、无人机的速度与机动性越来越高,各种战术弹道导弹的威胁也越来越大,给舰载区域防空系统带来很大的压力。传统的舰载防空导弹只采用气动力控制,依靠舵面偏转产生气动力矩控制导弹,在发射初始段或高空飞行时,由于动压不足舵面效率较低,导致过载响应速度较慢,限制了导弹的有效拦截范围和精度。为解决这一问题,美国、欧洲等国已经在舰艇上装备了新型舰载直接力/气动力复合控制导弹[1]。
根据侧喷发动机安装位置,直接力/气动力复合控制导弹可分为轨控式、姿控式2种。轨控式的侧喷发动机安装在质心附近,侧向力作用于质心直接产生法向过载,可以迅速提高导弹的响应速度并增加可用过载,如俄罗斯的9M96E2导弹。姿控式利用装在导弹质心前的姿控发动机产生控制力矩,迅速改变弹体姿态角产生气动力而提高导弹的响应速度,广泛地应用于大气层内拦截弹中,如美国的ERINT-1拦截弹[2]。侧喷发动机根据燃料不同可分为液体燃料发动机(如德国TLVS)与固体燃料发动机(如俄罗斯9M96E);根据推力特性可分为连续推力型(如英国Aster-15/30)与离散脉冲推力型(如美国ERINT-1)。针对不同的侧喷发动机形式,需要采用不同的控制算法及实现方案。
针对姿控式直接力/气动力复合控制导弹的复合控制问题,国内外学者作了不少研究工作,文献[3]采用动态控制分配方法,将直接力作用点在导弹质心前后2种情况分别做了验证;文献[4]采用二阶滑模控制方法设计了复合控制导弹的控制系统;文献[5]利用变结构控制进行了复合控制系统设计,讨论了复合控制系统的实现问题;文献[6]运用模糊控制的无限最大逼近特性设计了脉冲推力器点火控制器;文献[7]设计了基于参考模型的模糊自适应控制分配策略,并采用进化策略对参数进行优化。总体来看,这些研究取得了一定的效果,但基本上都是基于简化模型,没有充分考虑喷流干扰带来的模型不确定性,对模型的精确性要求较高,并且大多停留在理论探索阶段,离工程实用还有一定距离。
针对当前研究存在的问题,本文首先建立了姿控式复合控制导弹的数学模型,以俯仰通道为例,提出了一种基于模糊控制理论的控制系统设计方法,包括点火算法和控制分配算法,然后考虑算法的工程实现问题,分别设计了有限时间收敛微分器、自旋稳定弹PWPF点火实现方案、一种改进的旋转弹叠加点火算法实现方案。最后在某特征点对导弹进行了仿真验证。
1 复合控制导弹数学模型
1.1 俯仰通道简化模型
导弹采用类似ERINT-1拦截弹的姿控式布局,如图1所示,采用轴对称设计,弹尾配置2对全动式气动舵,姿控发动机安装于质心前端,拦截末段开启,产生直接侧向力来提供控制力矩。

图1 导弹气动布局Fig.1 Aerodynam ic configuration of missile
当姿控发动机点火时,侧向喷流将与外部流场发生非常复杂的干扰效应,流场内会出现分离激波、马赫盘和分离涡等复杂的物理现象,称为喷流干扰效应(JI)。喷流干扰非常复杂,难以建立精确的数学模型,但控制系统设计时关注的是喷流干扰产生的附加干扰力和力矩的影响,可以采用推力放大因子KF来描述喷流干扰产生的影响,KF定义如下:

式中:Fi为喷流引起的干扰力,Fj为姿控发动机的静态推力。KF除了与导弹及姿控发动机配置参数有关外,还与与攻角、马赫数、飞行高度、气流扭角等变量有关,工程上多采用风洞试验和计算流体力学(CFD)的方法获得。在短周期模态下,导弹马赫数、高度变化不大,可将喷流干扰因子近似视为攻角α的连续函数。
考虑导弹末制导段纵向平面的短周期运动情况,即令 β、γ、γV、ψ、ψV、ωx、ωy≈ 0,由于末制导段较短,因此可将导弹的质量和速度视为常值,忽略外形不对称及升降舵下洗延迟产生的附加力矩,并考虑喷流干扰的影响,建立导弹俯仰通道短周期数学模型[8]:

式中:m为导弹质量,V为速度,δz为俯仰舵偏角,α为攻角,F为弹体坐标系下姿控发动机标称推力,Jz为导弹绕z轴的转动惯量,ωz为导弹绕z轴的转动角速度,lT为姿控发动机到质心的距离,Yα、Yδz、Mδzz 、、、等为相关气动参数。
1.2 导弹控制方案
高机动防空导弹多采用过载控制,自动驾驶仪跟踪制导系统输出的过载指令。在弹体坐标系下导弹法向过载表示为

取状态变量为x1=α,x2=ωz,控制量为u1=δz,u2=F,输出变量为ny,将方程(2)、(3)写成仿射非线性形式:

式中:

控制系统设计任务是在参数不确定和喷流干扰的综合影响下,设计合理的控制量u1,u2满足系统性能指标,同时保证系统的稳定。气动力u1和直接力u2属于2种性质完全不同的控制量,同时设计存在较大困难,考虑将系统分为直接力子系统和气动力子系统分别设计。由于气动力控制已经有比较成熟的算法,本文主要对直接力子系统的点火进行研究;同时为避免2个子系统之间产生耦合,导致发动机反复点火或舵偏角高频震荡,本文将设计控制分配算法对二者的控制权限进行实时分配。
导弹的复合控制系统总体结构如图2所示。

图2 复合控制示意图Fig.2 Compound control schematic
2 控制系统设计
大气层内复合控制导弹具有多个执行机构,飞行参数变化剧烈,是一个非线性、不确定、强耦合的系统,传统的控制系统设计算法严重依赖系统的精确数学模型,而模糊控制不依赖精确的数学模型,具有更强的鲁棒性。由于考虑到算法复杂性,模糊控制规则数不可能过多,导致控制精度较低,为提高控制精度,又不带来过多的计算开销,发展出了变论域模糊控制方法[9]。
2.1 变论域自适应控制基本原理
设Xi=[-Ei,Ei]是模糊控制器i个输入变量xi(i=1,2...n)的论域,Z=[-U,U]是输出变量z的论域,设A={Aij}是论域Xi上的一个模糊划分,B={Bj}是论域Z上的一个模糊划分,则模糊逻辑系统模糊推理规则可表示为

因此常规模糊控制系统可以表示成一个n元插值函数:

变论域模糊控制方法是指在模糊规则数目和形式不变的前提下,通过设计合适的论域变换因子,使论域范围随着输入变量的变化自适应调整,达到精确控制的效果,如图3所示。
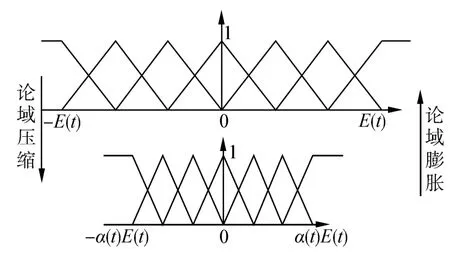
图3 论域的变化Fig.3 Universe variation
变化后的论域可以表示为

式中:α(xi),β(z)为输入、输出论域的伸缩因子。
变论域模糊控制系统可以表示成:

论域收缩相当于增加了规则数,越接近期望控制点,控制器的档级越小,因此在提高控制精度的同时而又不会增加过多的计算开销。在变论域模糊控制理论中,伸缩因子须满足对偶性、避零性、单调性、协调性和正规性等要求。
2.2 模糊点火算法
以俯仰通道为例进行设计,选择双输入单输出结构的模糊控制器,输入量分别为俯仰通道过载跟踪误差en与误差的变化en',输出量为姿控发动机连续推力F。
兼顾控制精度和算法复杂度,定义en,en'与F的模糊集均为 {NB,NM,NS,ZE,PS,PM,PB}。参考国外几种已服役的先进复合控制导弹(如ERINT-1、9M96E、Aster等)的过载响应能力及所设计导弹性能指标,结合典型目标的运动特性,选取en,en'与F的论域分别为[-E,E],[-Ec,Ec],[-F,F]。
采用图3所示的具有对称形式的三角型隶属度函数,各个模糊子集在论域上均匀分布。这种隶属度函数具有形式简单、计算效率高的特点,适合复合控制导弹这种需要快速响应的系统。考虑到快速跟踪、减小超调量、节约发动机燃料,建立如表1所示的模糊规则表。
为得到较平滑的输出以保持导弹姿态稳定,采用重心法解模糊,即取隶属度函数曲线与横坐标围成面积的重心作为模糊推理的最终输出值:

同理,偏航通道采用类似的模糊控制算法跟踪该通道的过载指令。

表1 模糊控制规则表Table 1 Fuzzy control rule
2.3 论域伸缩因子选取
目前变论域模糊控制的伸缩因子还没有统一选法,为提高控制系统的品质,应综合考虑误差en以及误差变化率en'的影响。以en的论域伸缩因子为例说明,α(en)与dα(en)/d t应满足:当误差较大时,只需粗略控制,伸缩因子无需快速变化,此时α(en)应接近1且dα(en)/d t较小;如果误差E较小时,需要精确控制,伸缩因子需快速变小,此时α(en)应较小但dα(en)/d t较大。因此本文选择如下的指数函数作为伸缩因子:

式中:k∈(0,1),δ为一充分小的正数,一般情况下取δ≤E/1 000。
结合复合控制导弹的实际情况,选取如下伸缩因子:
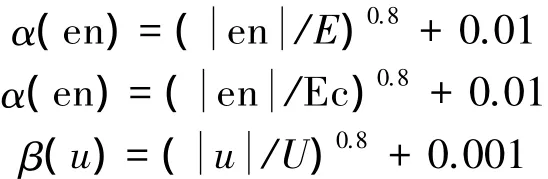
其中,M为一较大的正数,经验证α(en)满足伸缩因子的选取原则,并且满足避零性、单调性、协调性、正规性、对偶性公理。
2.4 控制分配算法
本节使用可通过导引头测量或估算的弹目相对距离R、可通过加速度计测量的过载跟踪误差E ,给出控制分配参数的确定原则及方法。由于弹目相对距离R的大小受目标机动及导引头测量误差影响,会带有较大的不确定干扰,过载跟踪误差E 主要由加速度计测量,由于姿控发动机推力及喷流干扰的影响也会存在较大干扰。为增强算法的实用性,控制分配算法设计时需采用不依赖系统精确的数学模型、对参数不确定因素具有鲁棒性的算法。首先给出控制分配需遵循的基本原则:
1)当弹目相对距离R较大或过载跟踪误差E 较小时,为节约姿控发动机燃料,优先采用气动力控制,直接力子系统关闭或者取较小值。此时直接力子系统的分配参数kj应较小。
2)当弹目相对距离R较小或过载跟踪误差E 较大时,为了提高响应速度,优先采用直接力控制,气动力主要起协调作用。此时直接力子系统的分配参数kj应较大。
3)随着弹目相对距离R的逐渐减小,应逐渐加大直接力子系统的分配参数kj。
4)随着过载跟踪误差 E 的逐渐减小,应逐渐减小直接力子系统的分配参数kj直至为0。
5)一般情况下,直接力和气动力的分配参数应满足ka+kj≈1。
根据上述规则,可为2个子系统分别设计双输入单输出模糊控制器,输入量分别为弹目相对距离R、过载跟踪误差E,输出为分配参数。采用如表2所示的控制分配规则表,为便于观察,将直接力与气动力分配规则写于1个图表内,前面参数表示直接力,后面参数表示气动力。

表2 控制分配规则表Table 2 Fuzzy rule for control allocation
隶属度函数及解模糊方法采用2.2节类似的方法。控制分配参数论域范围为[0,1],R、E 的论域范围是一个很重要的参数,决定了直接力的开启时刻,资料表明[10],国外复合控制导弹一般是在0.5~1 s左右开启姿控发动机,过早或过晚开启都会影响拦截效率,设计时可结合导引头捕获目标距离、弹目相对速度、目标机动加速度、目标角闪烁等综合因素来确定论域大小。
3 点火算法几个工程应用问题
本节考虑状态的可量测性和控制算法的实用性,对上节提出的复合控制算法在工程实现中存在的几个问题进行讨论。
3.1 有限时间收敛微分器设计
上述模糊控制器输入端含过载及过载的微分信号,过载信号可由弹上惯测组合单元(IMU)直接测量,而微分信号可只能通过数值方法求得,但在导弹实际飞行过程中IMU会受到较大的噪声干扰,利用差分原理的常规微分器很难正常工作。滑模微分器虽具有抑制噪声的作用,但切换函数导致抖振,且参数确定需要知道信号导数的上界。有限时间收敛微分器[11](FTCD)对噪声具有较强的抑制作用,可用于测量噪声较大的场合。本文采用的二阶FTCD对过载微分信号进行估计:
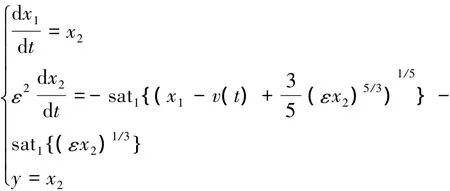
式中:sat(x)=1,扰动参数 ε=0.01,v(t)为测量信号(微分器的输入),x2为信号的一阶导数,y为微分器的输出。
3.2 点火算法实现技术
3.2.1 滚转稳定导弹点火算法实现
滚转稳定型导弹,只需设计2组姿控发动机分别控制俯仰和偏航通道,通过2个通道的组合即可产生任意方向的法向控制力矩。
对于姿控发动机推力连续可调的复合控制导弹(如欧洲的Aster-15/30、德国的TLVS),通过调节喷口的阀门开度,即可使姿控发动机的推力正比于控制指令,此时本文设计的模糊控制器可直接应用。
对于姿控发动机只能输出常值推力的导弹,工程上可采用脉冲调宽调频(PWPF)技术将连续推力等效为常值脉冲推力,达到“数字变推力”的效果。
PWPF调节器原理如图4所示,由一阶滤波器、施密特触发器(具有带滞环的继电器特性)及反馈回路组成,其中Km、Tm分别为一阶惯性环节的放大系数、时间常数,Uon、Uof f、Um分别为继电器的开关阀值、脉冲幅值,E为待调节的连续推力,p(t)为调节器的脉冲推力输出。当输入E=Uon时,可定义姿控发动机的最小脉冲宽度Δ:

定义一个周期T内点火时间和总时间之比为占空比DC:

根据图4可推知:

其中,

PWPF的工作特性可由脉冲工作时间Ton、脉冲周期T、最小脉冲宽度Δ,以及占空比DC来描述。设计时要考虑导弹的实际约束:发动机点火频率必须便于工程实现且避开导弹固有频率以免产生共振;滤波器时间常数Tm应使姿控发动机的延迟尽可能小;增益Km应使线性区尽可能大。减小时间常数Tm和增大增益Km可以提高调节精度但会增加姿控发动机开关次数;增大施密特触发器迟滞h会增加占空比DC的非线性度和最小脉冲宽度。具体设计时可以先由精度要求确定Ed,Es,再由最小脉冲宽度Δ及式(1)确定h与Km、Tm,最后很据式(2)确定所有参数。可参考 Krovel[12]等提出的PWPF控制器参数建议范围,如表3所示。
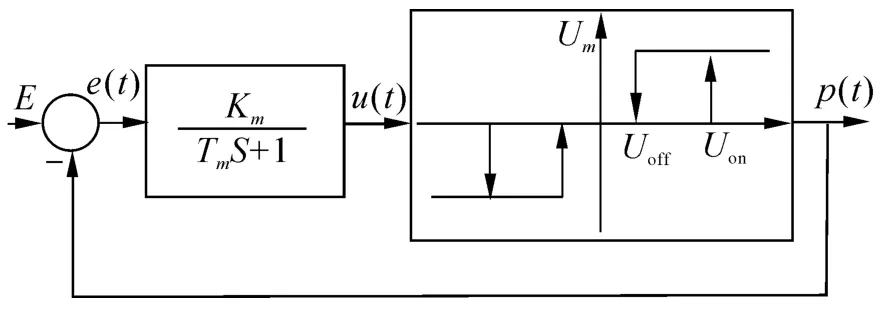
图4 调制器原理Fig.4 Principle of PWPF modulator

表3 PWPF参数建议值Table 3 Recommended parameter values for PWPF
3.2.2 滚转导弹点火算法实现
对于末制导段滚转的导弹,一般采用多组小型脉冲发动机组成蜂窝结构(如美国的ERINT-1拦截弹),此时需要设计脉冲发动机点火方向和数量。
文献[13]介绍了对称点火、叠加点火、扫角点火等点火方案并进行了改进。但该文介绍和设计的点火算法只能跟踪固定的点火指令,而实际上导弹和目标飞行状态实时变化,点火指令是不断变化的,以上几种点火方案实际应用时会极大地浪费脉冲发动机并降低过载跟踪速度。本节将在此基础上进行改进,并考虑弹体自旋对直接力分量的影响,提出一种改进的叠加点火方案,步骤如下:
1)将导弹准弹体系oy4,oz4方向上模糊控制器给出的点火指令Fyi,Fzi进行矢量叠加,得到当前总的点火指令:

2)立即开启离当前ti时刻总点火指令Fi反方向最近一排的Ni(i=1,2,3...)个脉冲发动机,产生的直接力矢量为,则有:

式中:ei为点火误差矢量,Favg为单个脉冲发动机作用时间T内,考虑导弹自旋运动的等效推力:

式中:FT为单个脉冲发动机点火产生的推力值。
Ni为第i次点火的脉冲发动机数目,可采用如下方法确定:

式中:Nimax为该列可用的脉冲发动机数目。
3)经过T+ε,即第i排脉冲发动机点火完毕后ε秒,制导系统和复合控制器对弹目状态和点火误差ei进行解算,更新下一时刻ti+1的点火指令Fi+1,重复步骤1)、2)对新点火指令进行跟踪。其中ε为设置的“等待时间”,以让高速来流吹除导弹表面喷流产生的流场,便于进行状态测量和指令解算。如导弹长度为l,飞行速度为V,可令ε=l/V。
记录每次点火消耗的脉冲发动机数目和位置,依次操作步骤1)、2)、3),直至导弹命中目标。
这种改进型叠加点火方案与对称点火方案的优势在于可以同时跟踪2个通道内的点火指令,节省脉冲发动机消耗;与扫角点火方案的优势在于响应速度快,无需等弹体旋转到与指令反方向完全重合时才点火。该方案可以跟踪实时变化的点火指令并且充分考虑了弹体自旋的影响,应用性较强。
4 仿真实验与结果分析
在Matlab/Simulink中对本文设计的复合控制系统进行仿真验证。喷流干扰近似为攻角α的一次函数,选取的某一高空特征点参数如表4所示。参数具体含义参照上文及文献[8]。

表4 仿真参数Table 4 Simulation parameters
将气动参数摄动30%,直接力子系统采用本文提出的模糊控制算法,气动力控制子系统仍然采用传统PID控制方法,系统状态初值均设为0,跟踪的过载指令为nc=20g的阶跃信号。
考虑到当前飞行器的过载机动能力及对导弹响应速度的要求,点火算法中en,en'的初始论域分别取为[-20,20]、[-40,40];控制分配算法中 R的论域取为[0,2 000],利用上述参数进行数学仿真,结果如图5~8所示。图5中2条曲线分别为采用连续推力和常值推力姿控发动机的导弹过载跟踪曲线。从曲线中可以看出:采用复合控制后即使在17km的高空,导弹仍能迅速的建立较大过载;采用连续推力姿控发动机的导弹过载响应较平滑,采用常值推力姿控发动机的导弹过载上升段出现较大抖动,主要是由于发动机点火瞬间产生的推力导致的(即姿控发动机的“轨控效应”),在气动舵的配合下不会对弹体稳定性带来较大影响;采用连续推力姿控发动机的导弹过载上升速度较快,这是由于接近指令过载时,复合控制器为避免较大超调输出较小的直接力,此时常值推力姿控发动机无法响应,而连续推力姿控发动机此时仍能响应。

图5 过载跟踪曲线Fig.5 Overload tracking curves
图6为攻角变化曲线。可以看出攻角的变化迅速、平稳,能很快达到稳定且超调量较小,没有因为姿控发动机点火推力及喷流干扰而出现较大波动。说明本文设计的姿控发动机点火算法和控制分配算法能有效地协调直接力与气动力子系统,且复合控制器对喷流干扰具有较强的鲁棒性。

图6 攻角变化曲线Fig.6 Curve of attack angle
图7为采用常值推力姿控发动机导弹的PWPF点火序列。可以看出,经PWPF调制后姿控发动机只需点火7次,点火最小脉冲宽度符合设计要求,并且无需反向点火,因此较节省燃料。图8为采用脉冲发动机的旋转弹在响应过载指令时发动机消耗情况。可以看出,整个响应过程共消耗29个脉冲发动机,主要集中在过载上升段,且数量不断减小。
对比图7和图8,仅从对过载指令的有效响应时间这一角度来看,在相同的指令过载下,如果姿控发动机推力不能连续可调,则采用多组脉冲发动机能更长时间地对指令进行响应,响应品质优于采用PWPF调节的姿控发动机。这主要是由于通过控制脉冲发动机点火数量可以产生不同大小的推力,使用灵活性较高;而采用PWPF调节的常值推力姿控发动机每次点火的推力大小都是固定的,并且受最小脉冲宽度等约束,不能无限制地提高点火频率。
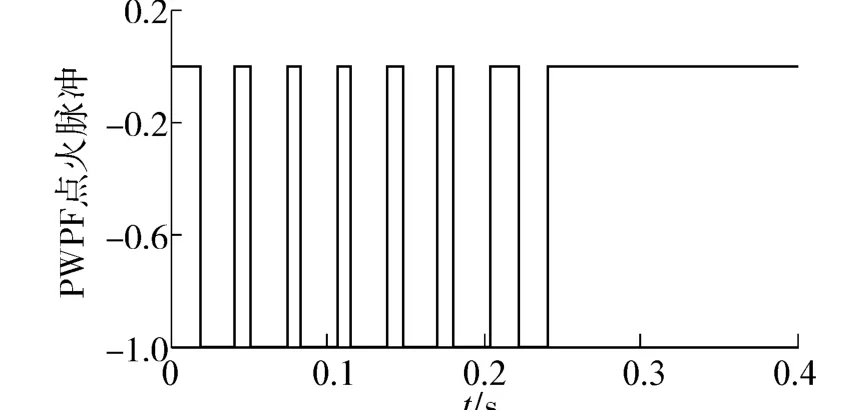
图7 PWPF点火脉冲Fig.7 Ignition pulses of PWPF
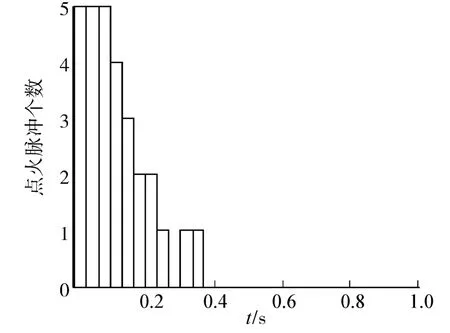
图8 脉冲发动机消耗个数Fig.8 Consumption of impulse thrusters
5 结束语
本文所设计的复合控制器弥补了气动力不足导致的响应延迟,对过载指令能迅速响应,且动态品质较好。点火算法对喷流干扰具有较强的鲁棒性,控制分配算法能够使直接力和气动力子系统协调工作,所提出的控制器设计方法具有一定的理论及工程参考价值。未来将进一步研究2个操纵机构的内在特性,在点火算法设计时综合考虑制导系统影响,以求进一步改进复合控制导弹的控制器设计。
[1]魏明英.直接侧向力与气动力复合控制技术综述[J].现代防御技术,2012,40(1):52-55.WEI Mingying.Summary of blended control technology for missiles with lateral jets and aerodynamic surfaces[J].Modern Defence Technology,2012,40(1):52-55.
[2]程凤舟.拦截战术弹道导弹末段制导和复合控制研究[D].西安:西北工业大学,2002:7-8.CHENG Fengzhou.Studies of guidance and combined control in terminal phase when intercepting tactical ballistic missile[D].Xi'an:Northwestern Polytechnical University,2002:7-8.
[3]RIDGELY D B,DRAKE D,TRIPLETT L.Dynamic control allocation of a missile with tails and reaction jets[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit.Hilton Head,USA,2007.
[4]SHTESSEL Y,TOURNESC,SHCOLNIKOV I.Guidance and autopilot for missiles steered by aerodynamic lift and divert thrusters using second order sliding modes[C]//AIAA Guidance,Navigation,and Control Conf.Keystone,USA,2006.
[5]马克茂,赵辉,张德成.导弹直接侧向力与气动力复合控制设计与实现[J].宇航学报,2011,32(2):310-316.MA Kemao,ZHAO Hui,ZHANG Decheng.Control design and implementation formissileswith blended lateral jets and aerodynamic control systems[J].Journal of Astronautics,2011,32(2):310-316.
[6]滕江川,吴晓燕,陈永兴.基于模糊控制理论的脉冲推力器点火算法[J].四川大学学报:工程科学版,2011,43(1):194-197.TENG Jiangchuan,WU Xiaoyan,CHEN Yongxing.Fire algorithm of pluse thruster based on fuzzy control theory[J].Journal of Sichuan University:Engineering Science Edition,2011,43(1):194-197.
[7]周锐,王军.导弹气动力/直接力自适应控制分配及优化设计[J].航空学报,2007,28(1):187-190.ZHOU Rui,WANG Jun.Adaptive control allocation between aerodynamic fin and side thruster and controller design usingmulti-objective optimization[J].Acta Aeronautica et Astronautic Sinica,2007,28(1):187-190.
[8]钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2002:36-48.
[9]李洪兴.变论域自适应模糊控制器[J].中国科学(E辑),1999,29(1):32-42.LIHongxing.Adaptive fuzzy controller based on variable universe[J].Science in China(Series E),1999,29(1):32-42.
[10]斯维特洛夫B T.防空导弹设计[M].北京:中国宇航出版社,2004:349-354.
[11]WANG Xinhua,CHEN Zengqiang,YANG Geng.Finite time convergent differentiator based on singular perturbation technique[J].IEEE Transactions on Automatic Control,2007,52(9):1731-1737.
[12]KROVEL TD.Optimal tuning of PWPF modulator for attitude control[D].[S.l.]:Norwegian University of Science and Technology,2005:38-40.
[13]尹永鑫.气动力/直接力复合控制拦截弹制导与控制方法研究[D].哈尔滨:哈尔滨工业大学,2008:71-76.YIN Yongxin.Research on guidance and control method of intercepter missile with aerodynamic and lateral thrust blended[D].Harbin:Harbin Institute of Technology,2008:71-76.