磁导航移动机器人里程检测系统的设计与实现
2014-10-20崔明月刘旭焱蒋华龙刘红钊
崔明月, 刘旭焱, 蒋华龙, 刘红钊
(南阳师范学院物理与电子工程学院,河南 南阳 473061)
0 引言
近年来,自主轮式移动机器人由于其广泛的应用前景而成为国际机器人学术界研究的热点[1]。自主移动机器人的导航系统是实现机器人自主移动的必要条件,而其导航需要解决“定位”、“运动目标”、“路径规划”[2],其中定位是后两者的前提和基础。目前,常用的定位方法主要有里程定位法以及视觉系统,前者一般采用光电编码器测量机器人里程;后者则采用视觉系统对场地中的位置进行全局定位[3]。由于土质疏松、地面结冰、快速转弯等因素的影响,会使机器人轮子产生打滑现象,这种情况下里程计的编码器信息变得很不可靠,从而产生里程测量误差,这种误差积累对机器人定位影响十分严重[4],而视觉系统定位法只适用于机器人静止状态时定位,但在运动时很难及时、准确地反馈机器人在工作环境中的实际位置[5]。
磁导航是以磁条或磁道钉作为信号源,利用移动机器人所载的磁传感器检测磁条或磁道钉的磁场信息,确定机器人的位置以及实际位姿。磁导航具有较高的测量精度及良好的重复性,不易受天气情况以及光线变化的影响,具有较高的可靠性和鲁棒性[6-8]。射频识别技术(Radio Frequency Identification,RFID)是一种非接触式的自动识别技术,其原理是利用射频方式进行非接触双向通信实现对物体的自动识别[9-12]。由于RFID具有非接触、价格低廉、使用方便的优点,在移动机器人定位中得到了广泛应用[13-14]。
综合磁导航系统与RFID定位技术的优点,本文提出一种磁导航和RFID技术相结合的检测轮式移动机器人里程方法,机器人每移动一段距离就通过RFID标签对磁导航系统测得的里程进行校正,能够在一定程度上解决机器人光电码盘里程计误差积累的问题。
1 硬件系统设计
整个系统的硬件结构如图1所示。机器人的车头与车尾各有一排磁传感器,每排安装8个,呈均匀分布,轴线与机器人前进方向相垂直;另外,RFID读写器安装于机器人车体前端靠右的位置。
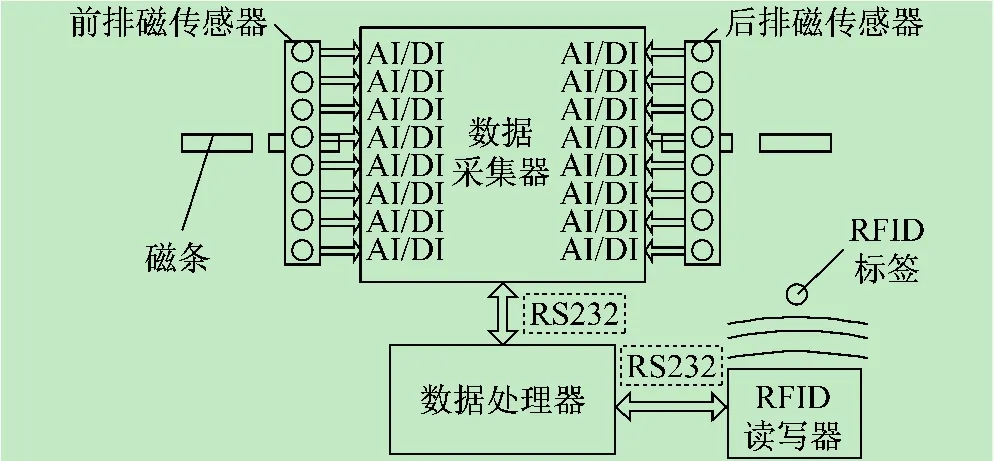
图1 磁导航系统的硬件结构图
磁条铺设时,要保证磁条之间具有稳定的无磁场区域,前后两排磁传感器组能够准确、稳定地检测到此无磁场区域。数据采集卡将磁传感器检测到的位置信息通过RS232数据线传给数据处理器,计算出当前的里程。由于本文提出的方法是通过记录磁条之间的无磁场区域个数来计算里程,所以轮子打滑对记录无磁场区域个数影响较小。
在里程计算过程中,所得里程数据的准确度会随着积累误差的增加而降低,所以需在机器人行进的路线上,相隔一定距离L安置RFID标签来对当前里程进行校正,并在标签中存入当前的里程基准值s0。当机器人读取到RFID标签内的数据时,更新当前的里程基准值s0,然后将计数器清零重新记录磁传感器组检测的无磁场区域次数。
1.1 磁传感器安装方式
系统的数据采集端由16个磁传感器组成,磁传感器距离地面的高度为H,同一排磁传感器之间的间隔为c,如图2所示。通过c以及H来保证同一排的8个磁传感器至少有2个能探测到磁场,避免磁传感器产生漏读现象。

图2 传感器安装示意图
1.2 磁条铺设方式
计算出长度为A的磁条的磁场空间范围[15],据此确定相邻磁条之间的间隔W,以保证2个磁条之间有稳定的无磁场区域,从而确保机器人在行进过程中能准确地获取磁场空白区域的个数,磁条的铺设方式如图3所示。
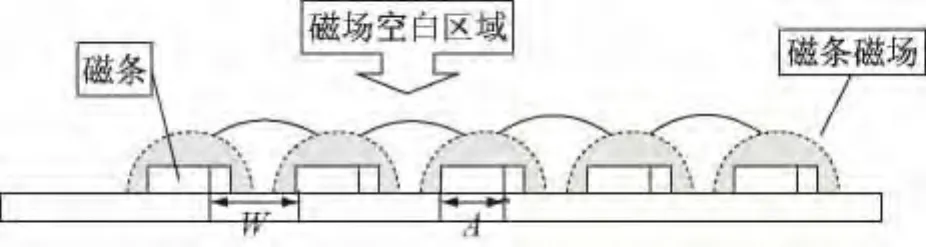
图3 磁条铺设方式示意图
1.3 RFID标签安装与预置
1.3.1 RFID 标签安装方式
RFID标签位置分布如图4所示。RFID标签距磁条的垂直距离为L1,相邻RFID标签之间距离为L2。

图4 RFID标签安装图
1.3.2 RFID 标签的预置
RFID标签分为左转弯标签、右转弯标签和里程标签。其中,左转弯标签和右转弯标签既提供转弯信息又提供里程信息,里程标签只提供当前的里程信息,如:里程标签MMMMxxxx,左转弯标签LL01xxxx,右转弯标签 RR02xxxx,“MMMM”为里程标签标志位;“LL01”为左转弯标签标志位;“RR02”为右转弯标签标志位;“xxxx”为当前的里程信息。一旦RFID读写器读到标签信息,数据处理器就对该信息进行解析以确定机器人的当前里程。
1.4 机器人转弯信息的设置
机器人的转弯方式有圆弧转弯和原地转弯两种方式,其中圆弧转弯方式对于一些空间狭小空间内的轮式移动机器人非常困难[16],因此本文采用原地转弯的方式,原地转弯方式不仅可以节约硬件成本而且能够降低软件编写难度。为保证准确、及时地获取转弯信息以及机器人位姿,转弯信息由弯标签和磁条共同提供。具体地说,如果数据处理器接收到转弯RFID标签的转弯信息同时又接收到前排磁传感器组发送的信号,才能够发送转弯指令进行转弯运动。转弯处的磁条与FRID标签安装方式如图5所示。

图5 转弯标志设置图
图5中,b为机器人机车体宽度的1/2,能够保证移动机器人原地转弯1/4圆周后,机器人车体的中轴线刚好与铺设了磁条的线路重合;k1、k2分别为机器人原地转弯后,前后排磁传感器组所处位置;a为k1处至转弯前磁条中心线的距离。机器人完成转弯之后,软件系统要在转弯之前的里程数据基础上,再加上b和a的长度。
2 系统的软件设计
2.1 软件系统设计
系统软件由初始化模块、RFID标签数据采集模块、RFID标签数据处理模块、磁导航系统里程计算模块组成,在运行完各个软件模块之后,要停止读取RFID标签信息和磁传感器信息一段时间t,防止多次检测到同一个标签和同一个位置的磁条间磁场空白区域,软件流程如图6所示。
2.2 初始化模块软件设计
磁导航系统启动后,如果前后磁传感器组检测不到磁场,可使机器人前后短距离移动,直到前后排磁传感器组都能检测到磁场为止。然后启动RFID读写器,同时将里程基准值s0、前后排磁传感器组计数器N1、N2清零,初始化模块软件流程如图7所示。

图6 软件系统图
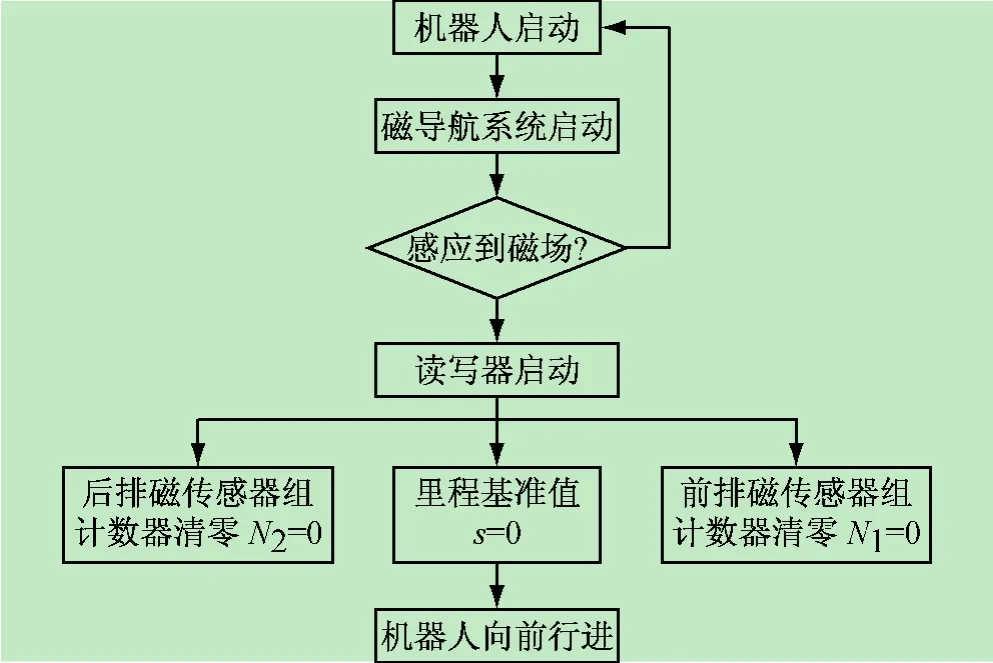
图7 初始化模块软件流程图
2.3 RFID标签数据采集模块
RFID标签数据采集模块软件流程如图8所示。RFID读写器启动之后,对RFID读写器参数初始化,并将RFID数据端口与数据处理器连接,读取RFID标签信息,并将得到的RFID标签信息传送给RFID标签数据处理模块。
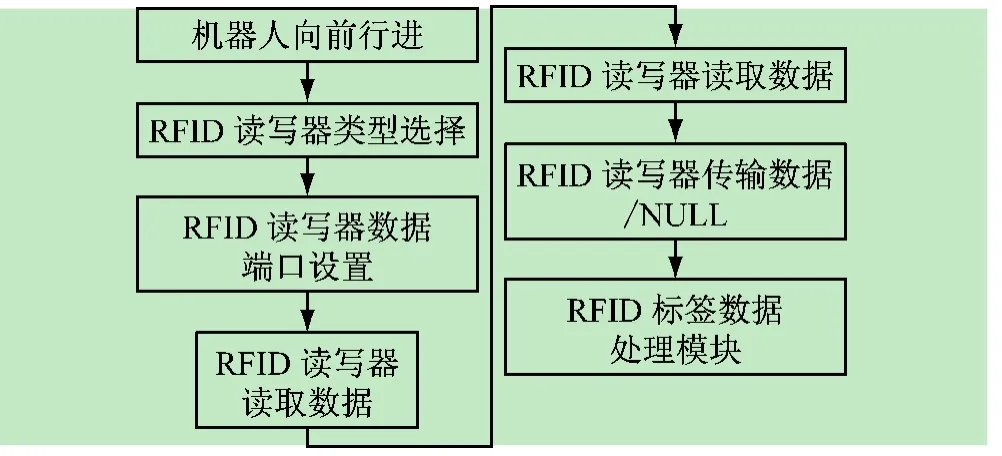
图8 RFID标签数据采集模块软件流程图
2.4 RFID标签数据处理模块
RFID标签数据处理模块软件流程如图9所示。RFID读写器读取到里程标签或者转弯标签的数据信息后,数据处理模块开始解析RFID标签的数据信息,更新里程基准值s0,重新记录前后排磁传感器组检测到的无磁场区域次数,并设置一个转弯信号标志位TR,当标签为里程标签则TR置0,若为左转弯标签则置TR为01;为右转弯标签则置TR为02。
2.5 磁导航系统里程计算模块软件设计
2.5.1 移动机器人直线运动时的里程计算
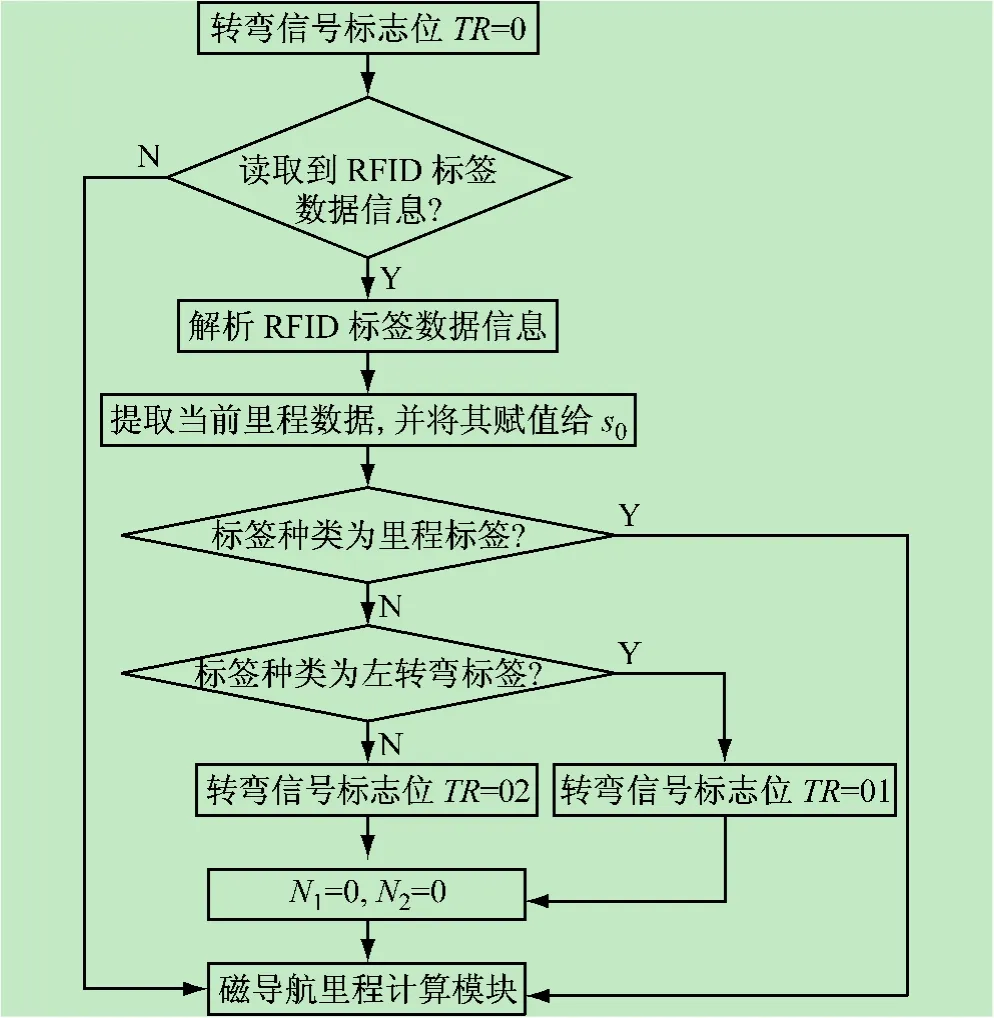
图9 RFID标签数据处理模块软件流程图
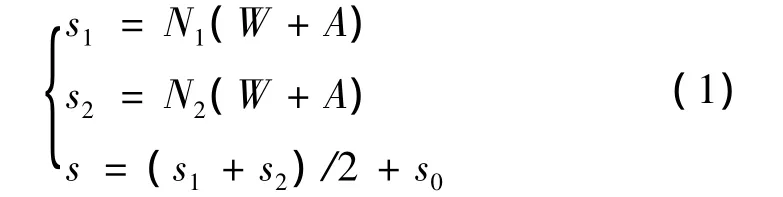
在机器人沿直线前行时,如果前排磁传感器组没有检测到磁场,则前排磁传感器组的计数器就加1,并记录前排磁传感器组检测到无磁场区域次数N1;如果后排磁传感器组没能检测到磁场,后排磁传感器组的计数器就加1,并记录后排磁传感器组检测到无磁场区域次数N2;如果后排磁传感器组能检测到磁场,则机器人继续前进。以RFID标签数据处理模块所得的里程基准值s0为基础,按下式计算当前里程s:
2.5.2 自主轮式移动机器人转弯时的里程计算
机器人沿着铺设了磁条的线路行进时,如果前排磁传感器组检测到磁场,则需进一步判断是否有3个以上的磁传感器检测到了磁场,并且转弯RFID标签转弯标志位TR是否为0,转弯条件满足,则机器人开始转弯运动。以RFID标签数据处理模块所得的里程基准值s0为基础,按下式计算转弯之后的里程,

机器人里程计算模块软件流程如图10所示。
3 系统性能测试
为验证本文所设计里程检测方法的有效性和可靠性,设计了如下实验。实验场地如图11所示,机器人的前进速度为0.4 m/s;数据采集选用研华PCI-1723数据采集卡,采集数据的频率为100 Hz;数据处理器选用研华ARK-5280型工控机;RFID读写器采用芯联公司的M5e读写模块和金属型RFID标签,数据读取周期为20 ms;磁条磁场强度为0.36 T,规格为5 mm×5 mm×50 mm;磁传感器间隔a设定为60 mm;磁条铺设间距W为120 mm。为使机器人轮子容易打滑,在路面上放置薄冰块与松软河沙。

图10 机器人里程计算模块软件流程图
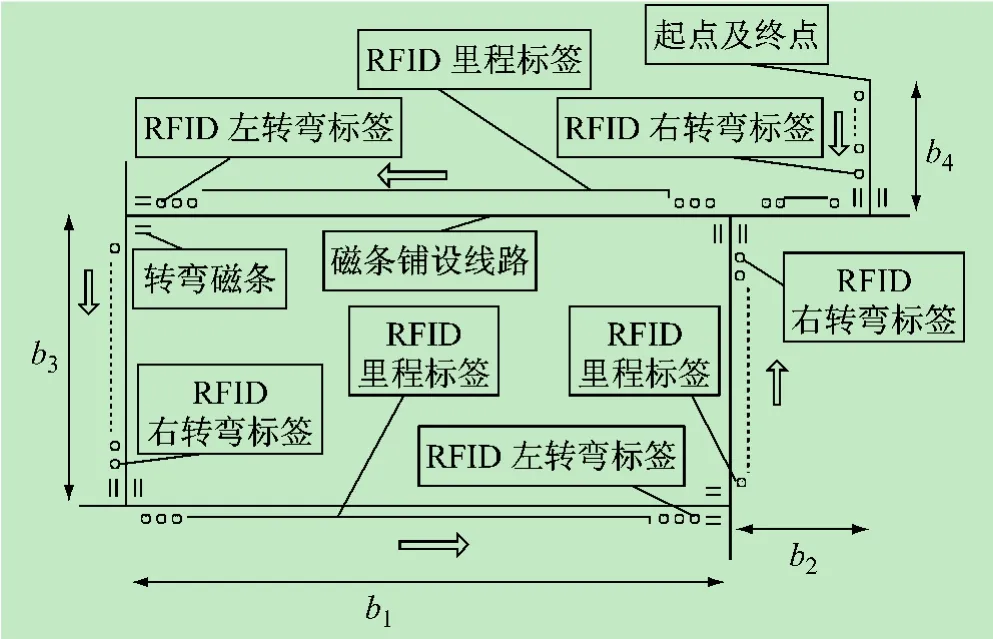
图11 实验场地示意图
图11 中,b1=40 m,b2=14 m,b3=30 m,b4=12 m,机器人里程的理论值可由下式计算:

式中:y为机器人位移;v为机器人前进速度;t为机器人运行时间;t1,t2,t3,t4,t5为机器人车轮的打滑时间。将里程理论值、本文方法实验结果与光码盘里程计测量结果进行比较,结果如图12所示。
利用实验所测得的数据通过下式计算光码盘里程计、本文方法在各个时间段内相对于理论值的平均相对误差:

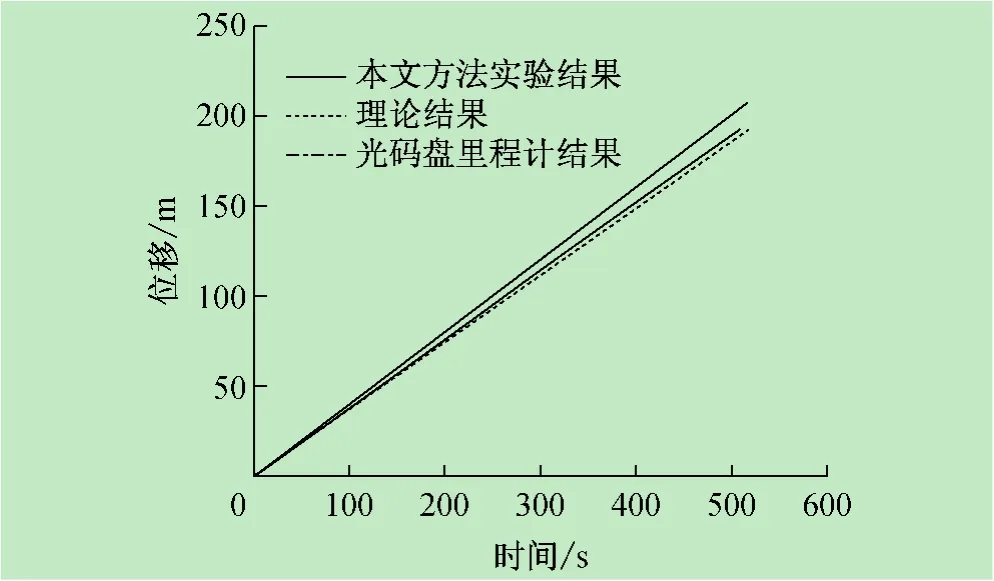
图12 试结果对比图
式中:δ为计时时间段内的平均相对误差;yi为1 s时间段内的理论值;xi为1 s时间段内光码盘里程计测试结果。δ的计算结果如表2所示。
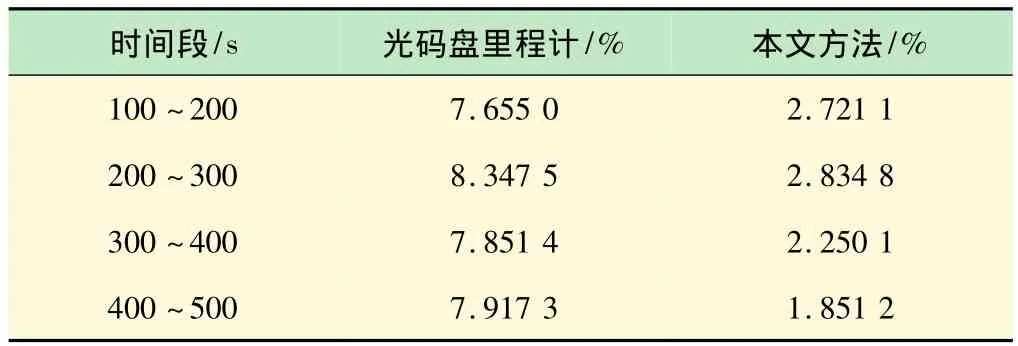
表2 本文实验结果、光码盘里程计结果相对理论值的δ
由图12与表2中的实验结果可以看出,本文所设计的基于磁导航与RFID技术的综合里程测量方法,对克服传统光码盘里程计因轮子打滑以及积累误差的增加而导致的准确度降低是有效的,也是切实可行的。
4 结语
本文通过磁导航系统与RFID技术相结合,提出了一种在磁导航轮式移动机器人上计算磁导航自主轮式机器人里程的新方法。该方法可用于磁导航自主轮式移动机器人在户外场景下的里程计算,降低了其里程计算的软硬件成本,能够克服光码盘里程计因轮子打滑、积累误差的增加导致的准确度降低等缺陷。
[1] 徐国华,谭 民.移动机器人的发展现状及其趋势[J].机器人技术与应用,2001(3):7-14.XU Guo-hua,TAN Min.The development status and future trend of mobile robot[J].Robot Technique and Application,2001(3):7-14.
[2] Durrant Whyte H F.Where am I-A tutorial on mobile vehicle localization[J].Industrial Robot,1994,21(2):11-16.
[3] Jorge Angeles,宋伟刚.机器人机械系统原理理论、方法论和算法[M].北京:机械工业出版社,2004.
[4] Shekhar S.Wheel rolling constraints and slip in mobile robots[C]//Proceedings of the 1997 IEEE International Conference on Robotics and Automation,1997:2601-2607.
[5] 张学民,陈西平,宋述稳.基于光电传感器的移动机器人局部定位系统[J].机电产品开发与创新,2010,23(3):8-10.ZHANG Xue-min, CHEN Xi-ping, SONG Shu-wen. Local Positioning System for Mobile Robot Based on Photoelectric Sensor[J].Development&Innovation of Machinery & Electrical Products,2010,23(3):8-10.
[6] 徐海贵,王春香,杨汝清,等.磁传感系统在室外移动机器人导航中的研究[J].机器人,2007,29(1):61-66.XUE Hai-gui, WANG Chun-xiang, YANG Ru-qing, et al. A Magnetic Sensing System for Outdoor Mobile Robot Navigation [J].Robot,2007,29(1):61-66.
[7] 朱从民,黄玉美,马斌良,等.惯性导航自动引导车磁钉校正路径迭代学习方法[J].农业机械学报,2009,40(7):41-44.ZHU Cong-min,HUANG Yue-mei,MA Bin-liang,et al.Path Iterative Learning of Inertial Guided AGV with Magnets Correction[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(7):41-44.
[8] 韩金华,王立权,孟庆鑫.护士助手机器人磁导航方法研究[J].仪器仪表学报,2009,30(4):834-839.HAN Jin-hua,WANG Li-quan,MENG Qing-xin.Study on magnetic navigation for nurse assistant robot[J].Chinese Journal of Scientific Instrument,2009,30(4):834-839.
[9] 游战清,李苏剑.无线射频识别技术(RFID)理论与应用[M].北京:电子工业出版社,2005.
[10] 刘卫宁,黄文雷,孙棣华,等.基于射频识别的离散制造业制造执行系统设计与实[J].计算机集成制造系统,2007,13(10):1887-1890.LIU Wei-ning,HUANG Wen-lei,SUN Di-hua,et al.Design and implementation of discrete manufacturing industry MES based on RFID technology[J].Computer Integrated Manufacturing Systems,2007,13(10):1887-1890.
[11] 李 崑,王 东.基于射频识别技术(RFID)的航空物流模型[J].实验室研究与探索,2006 25(9):1056-1058.LI Kun,WANG Dong.Systems Architecture for Aviation Based on RFID[J].Research and Exploration in Laboratory,2006,25(9):1056-1058.
[12] 李维敏.RFID技术在高校实验仪器管理中的应用[J].实验室研究与探索,2007,26(9):47-49.LIWei-min.Application ofRFID Technology to Instrument Management System in Universities[J].Research and Exploration in Laboratory,2007,26(9):47-49.
[13] 王殿君,兰云峰,任福君等.基于有源RFID的室内移动机器人定位系统[J].清华大学学报(自然科学版),2010,50(5):673-676.WANG Dian-jun, LAN Yun-feng,REN Fu-jun,et al. Indoor mobile-robot localization system based on active RFID[J].Journal of Tsinghua University(Science& Technology),2010,50(5):673-676.
[14] 王中云.基于RFID的机器人控制与定位系统研究[D].武汉:武汉理工大学,2007.
[15] 王明勇,郎志坚,李国军.方形磁体的空间分布[J].磁性材料及器件,2001(3):17-20.WANG Ming-yong, LANG Zhi-jian, LI Guo-jun. The Spacial Magnetic Field Distribution of Square Magnet[J].Journal of Magnetic Materal Devices,2001(3):17-20.
[16] 周海宝.轮式机器人转向机构的新设计[J].机械,1999,26(4):F002-F002.ZHOU Hai-bao.A new design of wheeled robot steering mechanism[J].Journal of Machinery,1999,26(4):F002-F002.
