基于单相机旋转平台的螺纹目标三维重建系统
2014-10-13谢卫容王心怡程龙飞吴庆华陈久印
谢卫容,王心怡,程龙飞,吴庆华,陈久印,何 涛
(1湖北工业大学现代制造质量工程重点实验室,湖北 武汉430068;2湖北工业大学机械工程学院,湖北 武汉430068)
国内外螺纹检测方法大多数以接触式检测为主,测量过程耗时费力,并且对检测人员要求较高,检测精度受人为因素影响较大。针对以上问题,本文提出基于单相机旋转平台的三维重建的检测方法。该方法操作简单,稳定性高,检测结果可视化,直观明了,可同时检测螺纹的多种参数。
1 系统方案设计
单相机旋转平台的螺纹目标三维重建测试系统主要由旋转工作台、微型计算机、平板光源、CCD相机以及DMC2410运动控制卡等组成(图1)。
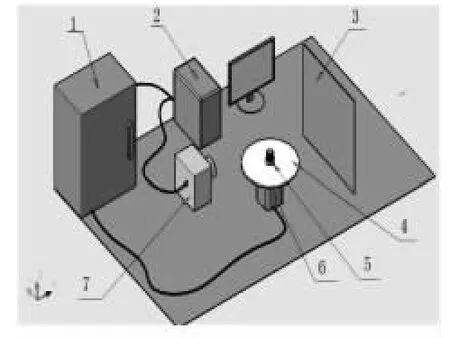
图1 三维重建测试系统原理配置图
结合系统要求,对该旋转工作台进行整体优化设计,确保旋转工作平台能够每次按指定的角度准确旋转,并且触发光电传感器,使CCD相机准确拍取每个旋转角度下的螺纹图像。该三维重建测试系统利用图像裁剪,二值化、腐蚀、滤波、提取轮廓等技术获取螺纹点的三维坐标信息,进行螺纹面的三维重建。通过上位机程序进行螺纹缺陷的动态显示、处理以及存储。
2 系统的标定
由于CCD相机在实际成像过程中会产生图像几何畸变,因此如何准备获取CCD实际参数直接影响到成像质量以及三维测试系统的精度。以像素为单位的尺寸转换为实际空间中以mm为单位的尺寸,被称为机器视觉系统的标定。大部分商业用机器视觉软件包通常都使用系统标定将像素坐标转换为物理坐标,如Adept公司的 Hex Sight软件、MVTec公司的HALCON软件等。本文采用相对标定方法,即通过测得标准件的像素尺寸,而标准件的实际尺寸已知,从而得到像素与mm换算的比例关系。在实验室环境下,为了提高图像的分辨率,用30万像素分辨率CCD对活塞环局部拍照获局部照片,获取活塞环局部图,对某一型号活塞环进行测量;在相同的照明、图像采集等条件下标定,像素与mm的换算关系为k=74.671 pixels/mm,重复测量的精度达到0.08~0.19像素。实验结果如表1所示。
实验表明实验表明,通过标定后,测量精度高达0.005 mm,完全满足系统检测要求。

表1 标定定结果
3 系统的软件设计
本三维重建测试系统使用MFC编程,其三维重建测试系统流程如图2所示。
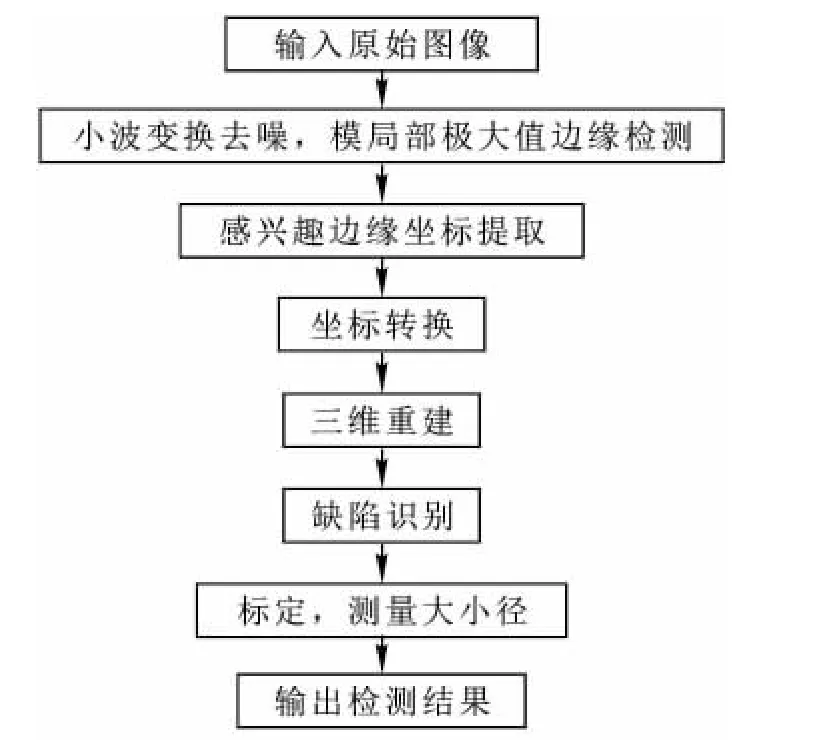
图2 三维重建测试系统流程图
4 测试结果分析
用30万像素分辨率CCD获取管螺纹图片,在相同的检测环境下,通过宽度分别为14.000 mm和8.500 mm的标定块进行标定,像素与mm的换算关系为29.747 pixels/mm,重复测量的精度达到0.15~0.30像素。表2为某一螺纹的检测结果。

表2 某一螺纹检测结果
实验表明,通过标定后,测量的精度达到0.006 mm,在4 000次螺纹外观缺陷识别试验中,合格品为3 800个,有表面破损的不合格品为200个。合格品判断为不合格的情况只出现5次,不合格品判断为合格品的次数为0,存在螺纹外观缺陷的产品可100%识别,其过判率小于0.1%。
5 结束语
本三维重建检测系统采用单相机旋转平台的方法。该方法硬件成本相对低廉,检测速度快,检测结果直观明了。经验证,该方法准确率高。
[1]韩九强.机器视觉技术及应用[M].北京:高等教育出版社,2009:2-15.
[2]夏良正.数字图像处理[M].南京:东南大学出版社,1999.
[3]李 健,刘先林,刘凤德.基于双立体同步摄影的面部三维重建与量测[J].测绘科学,2002(02):43-45.