不间断飞行太阳能飞机总体参数设计研究
2014-09-17曹青周洲昌敏
曹青, 周洲, 昌敏
(西北工业大学 无人机特种技术国家重点实验室, 陕西 西安 710065)
0 引言
在对太阳能飞机的研究中发现,由于受太阳能动力能源系统技术发展水平的限制,太阳能飞机和传统飞机相比飞行速度低、负载能力弱、结构要求高、制造成本高,不具备实用优势。然而,具有不间断飞行能力的太阳能飞机由于省去使用中的起降、补给和地面维护,可以实现全寿命周期物资、人力和时间成本的大幅缩减,甚至实现零成本。因此在侦察监视、数据中继、区域巡逻等长航时领域,不间断飞行太阳能飞机将具有比传统高空长航时飞机更广阔的发展前景。
无限航时飞行是人类的一个梦想。1983年,文献[1]根据能量平衡原理设计的太阳能飞机可以实现不间断飞行;1992年,Bailey等[2]在此基础上系统地分析了与太阳能飞机相关的各项关键技术;在之后的十多年中,虽然有Helios系列的尝试,但其设计方法往往秘而不宣;2007年,Noth根据能量平衡原理,建立了一套不间断飞行太阳能飞机参数化设计方法[3],并在Skysailor的全周期飞行中得到验证,因其理论基础坚实和太阳能特色充分而得到研究者广泛认可。在国内,由西北工业大学的昌敏等率先展开太阳能飞机设计方法的研究,综合飞行原理对分系统技术指标进行了敏度分析[4]。
本文将着力于展示由能量链到布局参数的设计过程,建立不间断飞行太阳能飞机在总体参数设计上的一般方法,以及在能量平衡中耦合气动估算模型的方法,以匹配出更合适的参数,还将对比以前的做法以体现新方法的优势。因为太阳能飞机能量的采、充、放循环都与布局参数、气动参数相耦合,所以可以说,设计好了能量链,也就设计好了太阳能飞机[1]。
1 能量模型构建
在有限航时传统飞机设计中,以下迭代公式被广泛使用[5]:
m0=mc+mp+mf+me
(1)
式中,m0为起飞质量;mc,mp,mf,me分别为乘员质量、载荷质量、燃油质量和空机质量。
不妨假设不间断飞行的太阳能飞机也有类似迭代公式:
(2)
式中,用字母i替代飞机的各部件名。各部件质量mi与输出功率Pi有质量功率比ξi或质量能量比γi的关系:
mi=ξiPi
(3)

(4)
各部件输出功率Pi能用效率ηi连接成一条能量链:
P0=P1η1=P2η2=…=Piηi=…
(5)
将以上描述反过来,就得到从构建能量链开始的不间断太阳能飞机总体参数设计一般方法。
1.1 构建能量链
首先建立太阳能飞机能量链物理模型(概念图见图1):白天,在功率跟踪器(MPPT)管理下,铺设于机翼的光伏组件将光能转化为电能,部分用于维持平飞和任务执行,剩余部分用来补充二次电池储能;夜晚,飞机利用二次电池储能维持任务飞行直到日出。
在建立递进能量链数学关系时,仍然反向思考,从平飞需用功率Plev开始考虑(见图2)。

图1 能量链物理概念图Fig.1 Energy chain physical concept

图2 设计方法组织结构图Fig.2 Design methodology structure
用平飞需用功率Plev除以螺旋桨效率ηplr、减速器效率ηgrb、电机效率ηmot、电机控制器效率ηctrl,得到电机轴功率Pshf:
Pshf=Plev/(ηplrηgrbηmotηctrl)
(6)
电机轴功率Pshf与计入变压器效率ηbec的任务功率Papp组成飞机总功率Ptot:
Ptot=Pshf+Papp/ηbec
(7)
上式中,任务功率Papp按比例κp选取:
Papp=κpPlev
(8)
令电池储存的能量等于夜晚消耗的电量,得到二次电池能量Ebat与总功率、放电深度效率ηdch和越夜时长Tnoc的关系:
Ebat=TnocPtot/ηdch
(9)
维持飞机一昼夜周期工作的总电能Eele用计入充电效率ηch的二次电池能量与白天飞机消耗的电能PtotTday相加所得:
Eele=PtotTday+Ebat/ηch
(10)
最后,令白天采集太阳能与昼夜消耗的电能相等,得到太阳能需用值Esol与总电能、太阳能电池转换效率ηpv、峰值跟踪器效率ηmpt、电池板装角效率ηφ的关系:
Esol=Eele/(ηpvηmptηφ)
(11)
功率跟踪器的质量取决于最大功率而非平飞功率,所以建立第二条能量链:
最大电功率Pemx等于太阳峰值辐照度Imax与光伏面板面积Spv的乘积与电池转换效率ηpv、峰值跟踪器效率ηmpt、电池板装角效率ηφ之比:
Pemx=ImaxSpv/(ηpvηmptηφ)
(12)
因为光伏面板的面积Spv需由太阳能需用值与全天单位面积上所能采集的太阳能量所决定:
(13)
所以两条能量链连接到了一起。
1.2 构建质能关系
推进系统功重比kppl、二次电池能量密度kbat、MPPT功重比kmpt是部件固有特性,可直接得出推进系统、二次电池、MPPT的质能关系:
mppl=Pshf/kppl
(14)
mbat=Ebat/kbat
(15)
mmpt=Pemx/kmpt
(16)
式中,mppl,mbat,mmpt分别为推进系统、二次电池和MPPT的质量。
光伏面板质量mpv等于面板面积Spv乘以面板密度kpv:
mpv=Spvkpv
(17)
代入式(13),得光伏面板的质能关系:
(18)
而结构质量maf和任务质量mapp是能量链无关的质量,其估算公式需要另外给出。采用文献[3]的公式,有:
maf=ρafbx1Ax2
(19)
式中,b为展长;A为展弦比;ρaf,x1,x2为常数。
任务质量mapp按比例κm选取:
mapp=κmm0
(20)
将上述各部件质量相加,即得起飞质量:
m0=mppl+mbat+mmpt+mpv+maf+mapp
(21)
到此完成了质能关系式(2)的构建。
1.3 封闭迭代环
目前,文献[3-4]用能量平衡的迭代法求得了太阳能飞机的起飞质量。与图2所示的模型进行对比可以发现,虽然没有明确表示出能量链与质能关系的概念,但方法的本质是一致的。
但是文献[3-4]在建立起飞质量到功率能量的闭环时,使用了如下平飞需用功率公式:
(22)
式中,CL为升力系数;CD0为零升阻力系数;e为奥斯瓦尔德因子。升力系数和零升阻力系数是作为常数给出的。然而,随着设计展弦比和展长选取不同的值,雷诺数和马赫数将会发生改变,由此带来零升阻力系数和与之匹配的升力系数的变化。常数化的升力系数与零升阻力系数将会造成布局气动潜力上的浪费。为了改善上述方法,需要把升力系数、阻力系数与布局参数、起飞质量相耦合,建立相应的气动估算模型。
2 气动估算原理
根据气动估算的部件构成法[5],亚声速飞机的零升阻力系数由机翼、尾翼、机身、光滑外挂物的平板蒙皮摩擦阻力系数Cfi、部件形状因子Fi、部件干扰因子κi和浸湿面积比γi的乘积与杂项阻力CDp构成:
CD0=∑[κiγiFiCfi]+CDp
(23)
在总体设计阶段,取杂项阻力为零,并认为各部件零升阻力比例一致。等式可简化为:
CD0=κγwFwCfw
(24)
式中,κ为干扰因子,取为1.5;γw为浸湿面积比,取为2;Fw为机翼部件形状因子;Cfw为机翼平板蒙皮摩擦阻力系数。
机翼部件形状因子由翼型最大厚度弦点位置(x/c)max、最大相对厚度(t/c)max和马赫数Ma决定:
(25)
机翼平板蒙皮摩擦阻力系数在层流和紊流下有不同的算法:
(层流)
(26)

(27)
考虑机翼上同时存在层流和紊流,可以给定一层流比ηc进行估算:
Cfw=ηcCfwc+(1-ηc)Cfww
(28)
由于飞机的平飞速度V与弦长c可以表示为展弦比、展长、起飞质量和升力系数的形式:
(29)
c=b/A
(30)
因此,雷诺数与马赫数可表示为:
(31)
(32)
式中,μ为粘性系数;a为声速。
把式(31)、式(32)代入式(26)、式(27),给定布局参数A,b,环境参数g,ρ,μ,a,由式(24)~式(28)可得:
CD0=f(m0,CL)
(33)
另外,为了保证最低平飞需用功率,要使:
(34)
奥斯瓦尔德因子表示为:
e=1.78(1-0.045A0.68)-0.64
(35)
把式(34)代入式(33),最终得到:
CD0=fD0(m0)
(36)
CL=fL(m0)
(37)
将式(36)和式(37)代入式(22),可表示为:
(38)
选取一初值m0,先进行气动迭代,再进行能量迭代。这种方法把升力系数、阻力系数与布局参数、起飞质量相耦合,充分挖掘布局的气动潜力,降低低雷诺数下的误差,显然是更好的方式。
3 设计结果对比
为了考察上述方法的应用效果,分别按照上述耦合升力系数与阻力系数的模型和Noth用来设计Skysailor模型[3]写出的迭代程序,再导入Skysailor的设计指标进行起飞质量与相关性能的对比计算,设计域示意图与仿真对比图如图3~图6所示。图3中的空白区域表示在这些设计点处太阳能飞机无法具备不间断飞行能力。

图3 完整设计域示意图Fig.3 Complete design domain schematic
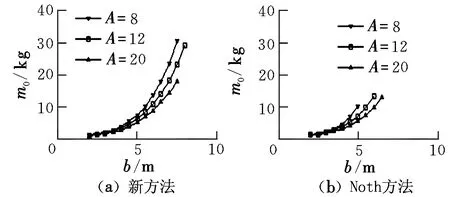
图4 起飞质量对比图Fig.4 Take-off weight comparison

图5 平飞需用功率对比图Fig.5 Level flight required power comparison
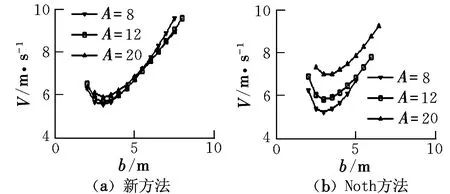
图6 巡航速度对比图Fig.6 Cruise speed comparison
对比起飞质量图可知,新方法拓展了设计域,原本被约束住的曲线在展长方向得到了延伸。在展弦比为8~12的设计域内,展长的设计极限从6 m增加到了8 m,相应的起飞质量设计极限从15 kg增加到了30 kg,增幅达到100%(见图4)。对比平飞需用功率图可以看出,平飞需用功率极限值也随曲线在展长方向的延伸而拓展了一倍(见图5)。飞机的任务功率和质量总是与平飞需用功率和起飞质量成正比,说明使用此方法可以用相同的设计指标设计出更大也具有更强的负载能力的飞机。
对比巡航速度图可以看出,在Noth的方法中,巡航速度与展弦比成反比。这点可用式(29)解释:在给定升力系数下,飞行速度与展弦比的二分之一次方成正比。在新方法下升力系数随展弦比增大而增大,巡航速度不再对展弦比敏感。这样带来的好处是在设计时可以不用考虑降低展弦比带来的速度损失;而通过图4、图5可以看出,适当降低展弦比可以带来起飞质量与平飞需用功率的增加(见图6)。
4 结论
(1)本文建立的由“建立能量链”、“建立质能关系”和“连接总质量和能量链起点完成迭代环”三步组成的不间断飞行太阳能飞机总体参数设计方法是可行的。
(2)本文在考虑布局参数的基础上,考虑了气动参数,提出了气动数据的估算方法,拓展了设计域,增强了设计方案的负载能力。
(3)因为气动估算模型已经考虑了高度和雷诺数,所以对高度和密度敏感的结合重力储能的设计方法将是下一步的研究方向。
参考文献:
[1] David H W,Charles F D,Dimiceli E V,et al.A preliminary study of solar powered aircraft and associated power train[R].NASA-CR-3699,1983.
[2] Bailey D M,Bower V M.High altitude solar power platform[R].NASA-TM-103578,1992.
[3] Noth Andre.Design of solar powered airplanes for continuous flight[D].Suisse:Ecole Polytechnique Fédérale de Lausanne,ETH Zürich,2008.
[4] 昌敏,周洲,郑志成.太阳能飞机原理及总体参数敏度分析[J].西北工业大学学报,2010,28(5):792-796.
[5] [美]雷曼尔.现代飞机设计[M].钟定逵,译.北京:国防工业出版社,1992:208-221.
