过载/迎角边界保护控制律仿真研究
2014-09-17王婷王博李德尚
王婷, 王博, 李德尚
(1.中国飞行试验研究院 飞机所, 陕西 西安 710089;2.中航工业西安飞机设计研究所 飞控所, 陕西 西安 710089)
0 引言
现代飞机普遍采用多余度电传控制系统,大大增强了机动能力,扩张了飞行包线,随之而来的是飞机操纵特性的较大变化。为了实现全飞行包线内的飞行员大幅度地无忧虑操纵,必须引入飞行边界保护功能,在飞行员拉杆极限时保证飞机能够达到而且不超过限制迎角或限制过载。因此提出了迎角边界限制器,其设计经历了硬限制、软限制(包括反馈限制和比较限制)等阶段。例如,美国早期的F-8C飞机采用了硬限制方式,F-4的生存控制系统采用了单级折线式软限制方式,F-16生存控制系统采用了二级折线式软限制方式,属于反馈限制方案[1]。我国目前在战斗机上对相关控制算法进行了验证,但在大型飞机上的相应控制算法研究较少。
1 控制原理
图1 飞行区域划分Fig.1 Flight envelope division
对于电传控制系统的边界保护分为两个方面,过载保护和迎角限制。对于常规飞行器,在飞行包线内一定存在着某个速压q*使Δnymax=Δny(αmax)。如果q>q*,则只需限制过载;如果q 实现全包线范围内的过载/迎角边界保护有如下两种典型方案: (1)按规律调节驾驶杆俯仰操纵到操纵面的传递函数; (2)在迎角和过载接近限制值时,在有静差或无静差系统中增加附加的迎角到舵面的反馈或附加的过载到舵面的反馈[2-3]。 图2 杆位移-过载限制曲线Fig.2 Stick displacement-overload control curve 由图2可以得到: Δny= 图3 迎角操纵期望曲线Fig.3 Angle of attack desired curve 由图3可以得到: 对无静差控制增稳系统,通过选择适当的控制律算法和参数,可自动实现给定限制。当低动压限制迎角、高动压限制过载时,需考虑限制参数转换的问题。本文采取大值转换逻辑实现边界保护功能。 引入纵向陀螺信号,采用如下自动控制算法实现过载限制控制: 过载限制控制系统框图如图4所示。 若飞机方程采用短周期形式: 则图4所示控制系统对应的过载响应为: 式中,Δnyc为指令过载,依据过载限制曲线计算获得。通过指令过载与飞机响应过载的传递函数可知,在稳态时: Δny(t→∞)=Δnyc 可以看出,图4所示的过载限制控制系统可实现指令过载的期望控制。按照图2调节杆位移指令到过载指令的传动关系,可精确实现过载边界限制。 图4 过载限制控制系统Fig.4 The control loop of overload limitation system 过载/迎角边界保护控制系统框图如图5所示。为实现图3所示的期望迎角操纵曲线,采用下式控制算法,按照取大值逻辑引入迎角反馈信号实现。 图5 过载/迎角边界保护控制系统Fig.5 The control loop of overload/AOA protection system 图5所示控制结构可实现如下控制逻辑: 式中,Cypf为平飞升力系数。 此时控制律为: 采用飞机短周期响应进行分析,稳态时有: α= 本文选取某机高空低速巡航和高空高速巡航两个飞行状态对过载/迎角边界保护控制律进行了仿真验证。对于过载限制控制律验证选取状态点:H0=5000 m,V0=203.3 m/s,nymax=2.5。 该状态点位于图1中的C区域,过载先于迎角达到限制值。为实现过载限制采取如图6所示的杆位移-过载指令仿真曲线。当飞行员拉杆到极限时,过载仿真曲线如图7所示。 图6 杆位移-过载指令仿真曲线Fig.6 Stick displacement-overload desired simulation curve 图7 过载限制仿真曲线Fig.7 Overload limitation simulation results 图8 杆位移-迎角指令曲线Fig.8 Stick displacement-AOA desired curve 当飞行员拉杆至极限时,飞机迎角响应曲线稳定于限制迎角αmax,过载稳定于一个小于限制过载的值,仿真曲线如图9所示。 由仿真结果可以看出,在图5所示的增稳控制回路的基础上,采用指令过载限制以及最大值切换的反馈迎角限制可以实现低动压限制迎角、大动压限制过载的功能。并且在线性仿真阶段与理论分析结果相吻合。 图9 迎角限制仿真曲线Fig.9 AOA limit simulation results 本文在设计过载/迎角边界保护控制器时,对飞行包线进行了区域划分,引入了过载/迎角操纵期望曲线。采用调节指令梯度限制过载,引入迎角比例积分控制限制迎角的方案。详细分析了过载/迎角限制的控制算法,给出了关键参数的理论计算。最后采用某型飞机不同飞行包线区域的状态数据进行了仿真验证。结果表明,采用此种控制律可实现过载与迎角的安全限制,同时采用取大值的转换逻辑可实现边界保护的自动转换和无静差控制要求,具有一定的工程应用价值。 本文仅对常规布局飞机的边界保护控制方案进行了论述,对于非常规布局的飞机可考虑引入其他辅助操纵面的实现边界保护,如鸭翼、推力矢量等。 参考文献: [1] 王华友,高亚奎,李振水,等.大型飞机迎角、过载限制器设计[J].飞行力学,2009,27(4):35-38. [2] Zeki Dikitas. Evaluation of the AOA limiter of the F-16 C/D aircraft [R].AFIT/GEENG/86D-9,1986. [3] Buckner J K,Walker J E,Clark C K.The design of the F-16 high alpha flight control characteristics and control system concept [R].USA:Aerospace,IAA,A79-23577,1979. [4] 张喜平,陈宗基.迎角过载边界限制器的设计方法[J].航空学报,1995,16(1):88-92. [5] 高浩,陈跃.大迎角限制器设计与飞机敏捷性[J].飞行力学,1994,12(2):21-26.1.1 过载限制



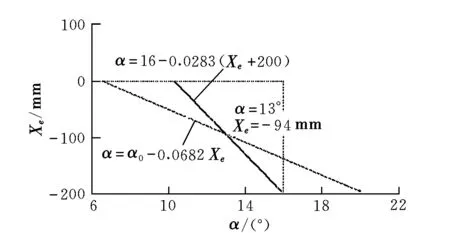
1.2 迎角保护


1.3 过载/迎角边界保护转换
2 控制律设计
2.1 过载限制回路设计

2.2 过载/迎角边界保护回路设计





3 仿真验证



4 结束语
