可变后掠翼技术发展与展望
2014-09-17董彦非陈元恺彭金京
董彦非, 陈元恺, 彭金京
(南昌航空大学 飞行器工程学院, 江西 南昌 330063)
0 引言
对于采用后掠机翼的超声速飞机,高速和低速性能要求相互矛盾。大后掠角虽然可以降低激波阻力,有利于跨声速和超声速飞行,但是也带来诱导阻力大、低速特性差的问题[1]。只有变几何形状机翼的飞机布局,其后掠角在飞行中可以控制,能满足对现代超声速多状态飞机的一系列相互矛盾的要求[2]。
可变后掠翼(或变后掠翼)是指在飞行过程中机翼后掠角可以随飞机飞行高度、速度变化而改变的机翼。变后掠翼飞机最大的优点在于飞行中可以通过改变机翼后掠角来改进飞机升力、阻力特性,使飞机飞行性能在高速、低速都能得到优化。
军用飞机方面,可变后掠翼战机不仅可以解决不同设计点气动布局的矛盾、改善飞行器的多功能性,还可以缩短跑道起飞距离、增大航程并且提高其经济效益和作战功能;在民用飞机方面,针对飞机在各个阶段不同要求的翼型结构形状,如果在巡航阶段可以改变机翼后掠角,则在一定程度上可以提高飞机的升阻比,在相同的航程情况下,可以节省燃油量,提高经济效益。
1 可变后掠翼飞机发展历程
变后掠翼飞机研究最早可以追溯到20世纪40年代。早在1944年,德国设计的世界上第一架可变后掠翼飞机梅赛施密特Me P.1101就在纸上成形。然而世界上第一架真正意义上的变后掠翼飞机是美国贝尔公司的贝尔X-5。第一架X-5在1951年2月15日建造完成,1951年6月20日首飞。由于稳定性很差,X-5没有投入生产,但是自X-5以后飞机变形技术取得很大的进步。第一架服役的可变后掠翼飞机是20世纪60年代中后期,美国通用动力公司(General Dynamics)研制的一种变后掠翼战斗轰炸机F-111土豚(Aardvark)[3]。
20世纪50年代~70年代,兼顾亚声速和超声速飞行成为飞机设计的主题,变后掠翼技术得到实用化,这是传统飞机变形设计的一次革命飞跃。20世纪六七十年代是变后掠翼技术发展的黄金时期,先后出现了包括F-111系列、B-1b、F-14、苏-24、苏-17/20、米格-23、米格-27、图-22M、图-160、狂风等十几个型号的变后掠翼飞机。在众多服役的变后掠翼飞机型号中,美国的F-14无疑是技术最先进和最成熟的,其外观如图1所示。
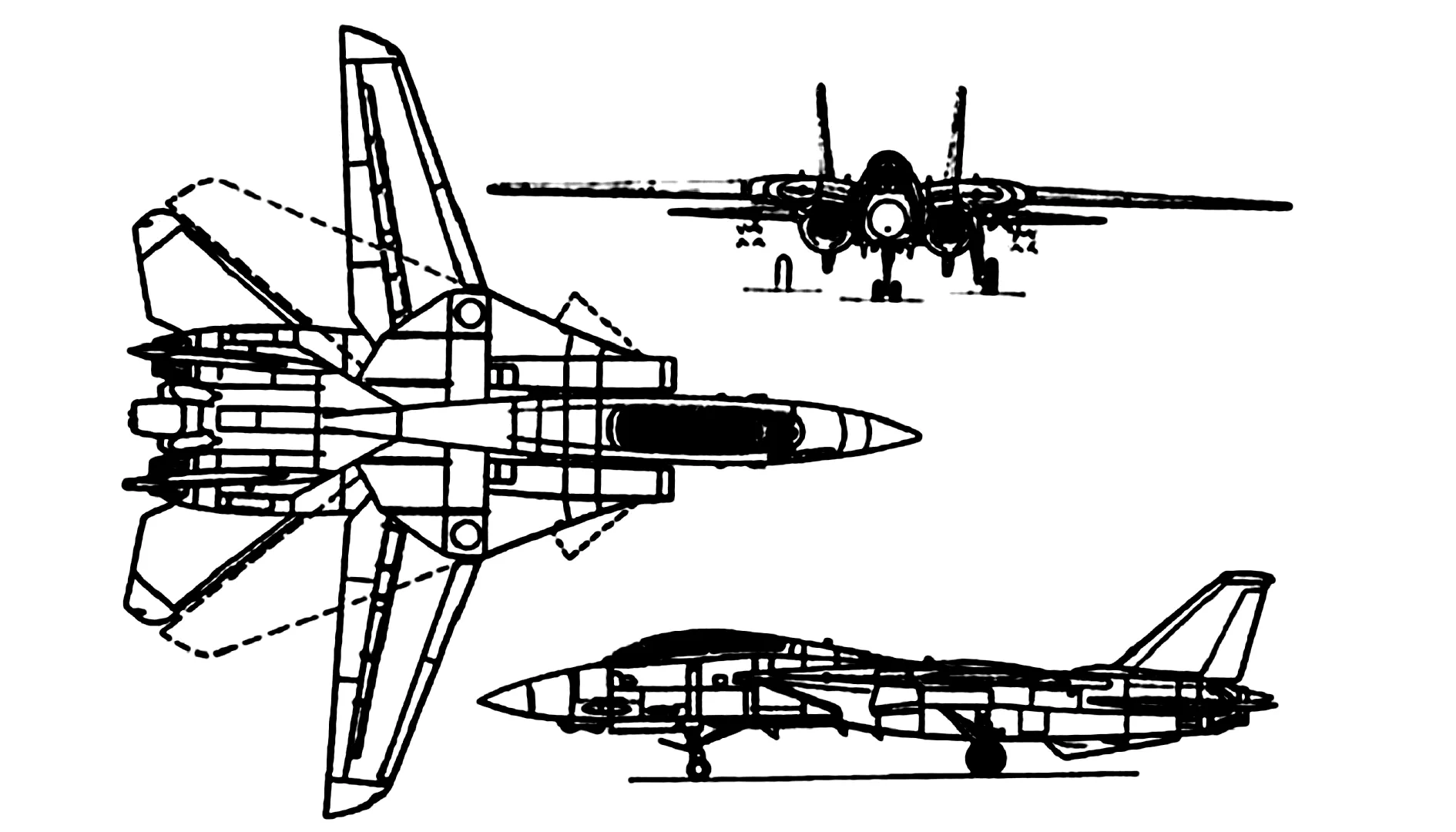
图1 F-14变后掠翼舰载战斗机Fig.1 F-14 variable-swept wing carrier fighter
F-14绰号“雄猫”(Tomcat),是美国格鲁曼(Grumman)公司于1968年开始研制的双座双发变后掠翼重型舰载战斗机,也是当时最成功的变后掠翼飞机。F-14采用机载计算机控制实现了后掠角从20°到68°的自动无级变化,同时满足高速和低速性能要求。
20世纪六七十年代,我国对米格-23MC可变后掠翼机构进行了研究。南昌飞机制造厂(现洪都航空工业集团)在米格-23MC的基础上,发展了一种单发单座超声速强击机作为强-5和歼-6的共同后续机,并命名为强-6。
1980年,我国开展了一项大型部级变后掠翼技术科研课题。经过8年多的努力,这一研究课题在设计技术方面取得了重大突破,成功地解决了可变后掠翼技术的气动布局(转轴位置、翼型、动态响应等)、机翼结构优化(转轴接头、三维应力计算、多约束优化技术等)、驱动机构及飞机控制系统一系列难题,为强-6的研制奠定了基础。但是由于可变后掠翼技术中的某些要求实现的难度较大,在当时超过了中国的技术能力水准,加上与之配套的涡扇发动机迟迟不能定型,不得不导致强-6战机下马,中国的第一种可变后掠翼战斗机的尝试以失败告终。
由于技术限制,很多服役的可变后掠翼飞机存在如超重、转动机构可靠性不高、飞行稳定性不佳、操纵复杂等难题,可变后掠翼研究在20世纪末期陷入低潮。
近年来,由于材料、智能结构、计算机技术、传感器技术、飞行控制系统等关键技术的发展,美国NASA、国防预研计划局(DARPA)和美国空军等组织积极重启并推动新型飞机变形技术的研究,变后掠翼技术又迎来了新的发展机遇。
2 变后掠翼技术分析
可变后掠翼可使飞机的升力特性和升阻比极大地改善(达1.5~2.5倍)[2]。飞机最大升阻比与后掠角关系如图2所示[1]。
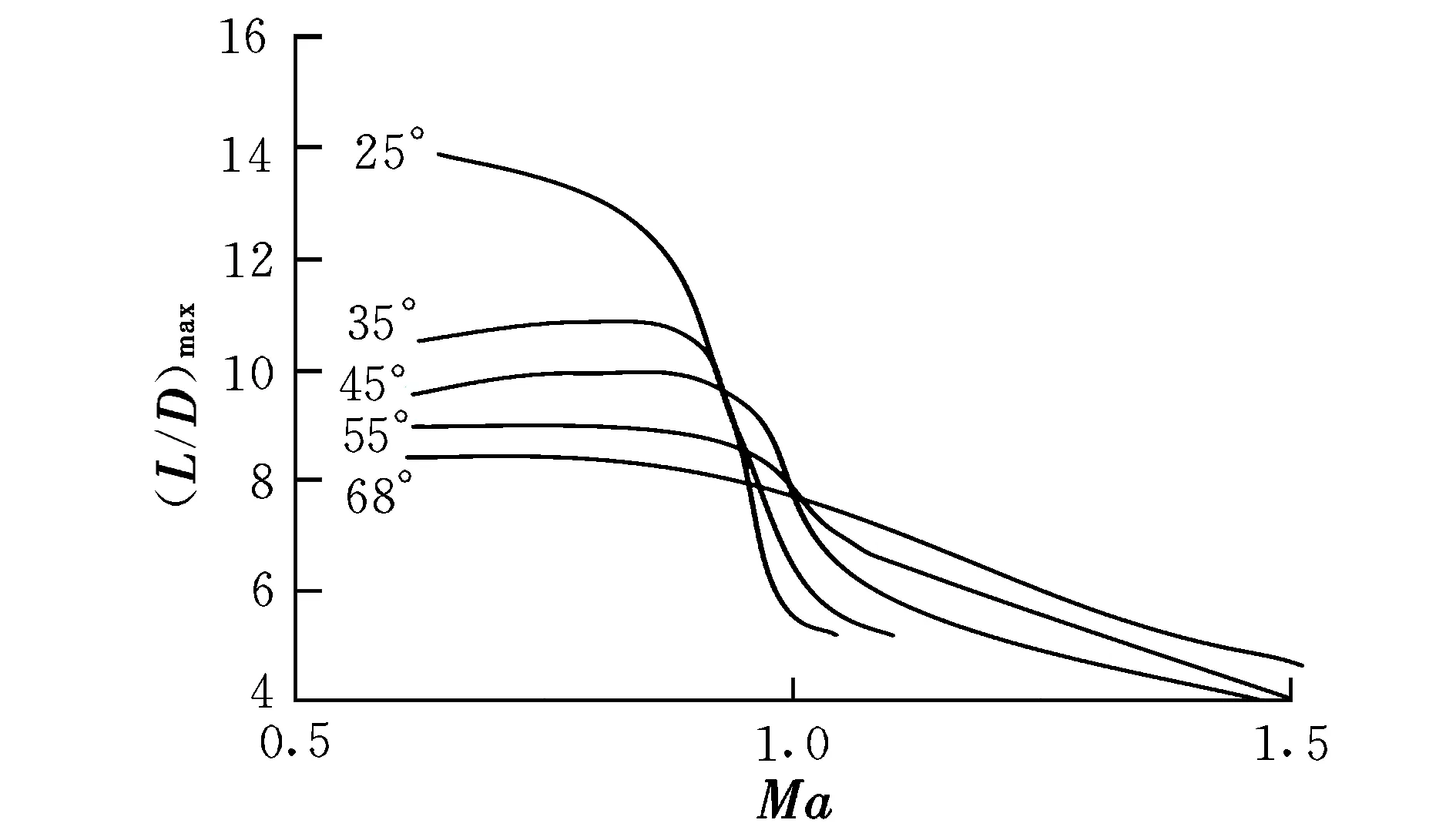
图2 最大升阻比与后掠角关系Fig.2 The relationship between maximum lift-drag ratio and swept angle
从图中可以看出,亚声速时,小后掠机翼气动效率最好;超声速范围,大后掠角机翼具有优越性。变后掠飞机在不同飞行速度均得到较好的气动效率,可以在执行任务的每个飞行阶段都达到较满意的性能,这是固定翼飞机难以达到的[1]。
变后掠翼带来的主要优势体现在:可变后掠翼飞机在起飞、着陆和低速飞行时,使用较小的后掠角,使机翼前缘升力增加,机翼效率提高,而高亚声速和超声速飞行时使用大后掠角,提高了飞机的加速性能和高速飞行能力。因此可变后掠翼飞机同时具有高空高速和低空高速及较佳的高亚声速巡航飞行能力;航程远、续航能力强;起落滑跑距离短、起落性能好。通过机翼后掠角变化,使飞机在低速和高速飞行中获得理想的机翼前缘升力。
由于变后掠翼飞机突出的短距起落性能,低空大速度飞行时有很好的突风响应特性,在战斗机和攻击飞机上达到成熟的变后掠技术也被引用到重型轰炸机[1]。典型的包括美国的B-1轰炸机和前苏联的图-26和图-160轰炸机。
但是,变后掠翼飞机存在两个主要问题:首先机翼后掠角的改变会造成气动中心的大幅度变化,这会给飞机的稳定性带来恶劣的影响;其次变后掠翼由于结构复杂带来很多问题。为了支持机翼后掠角的可变,机翼必须由可变动机构组成。增加了机身重量,机翼悬挂点减少,负载减少,灵活度减少。增加了机构的复杂度与固件的数量,可靠性大幅降低,同时生产复杂度和维护费用急剧增加。如F-14战斗机,先是去掉了副翼,而且其关键部位必须使用不能常规焊接的钛合金制造,为了其空气动力性能,甚至使用了类似气囊的部件来补充机翼后缘缺失的部分,即使如此其重量还是超过了同类战机。从而增加了制造和维护费用。
从以上分析可以看出,变后掠翼技术本身同时具有极佳的高速和低速性能。其面对的主要问题是如何设计变后掠的驱动机构,使其在保证合理气动中心的条件下简化机构、降低重量。
3 发展现状
变后掠翼技术经历了二十多年的沉寂之后,在材料科学与智能控制技术得到飞速发展的背景下,近年来发展起来的几项关键技术有望克服过去变后掠翼飞机结构复杂笨重的缺点,充分发挥其优势。主动气动弹性技术可以大大降低机翼结构刚度要求;智能材料结构将驱动、传感、控制和结构融为一体,为结构简洁、重量轻、可靠性高的智能变形机翼设计提供了物质基础。此外,随控布局设计思想和主动控制技术的最新发展也为“变翼飞行”提供了相关技术支撑。
3.1 国外发展现状
2003年,美国国防预研计划局(DAPRA)启动了“变体飞机结构”(Morphing Aircraft Structures,MAS)项目,再次掀起了“变翼飞机”设计的新浪潮,并资助洛马公司(Lockheed Martin)和 NextGen 航空公司进行该概念验证项目[4-6]。
MAS项目旨在通过飞行中改变飞机的气动外形使飞机在执行不同任务或在不同飞行包线时的飞行性能都保持在最佳状态。其长远目标是设计一种续航能力比“全球鹰”无人机更强、机动性比F/A-22战斗机更好的飞机,其中就包括了变后掠翼技术。NextGen航空公司研制的MFX-2变体飞机(见图3),在加州Camp Roberts军用试验场进行了多次自主飞行中的变形飞行,在5次约10 min的飞行中,该无人机在保持姿态与航向以及转弯过程中实现了机翼变形。从一种构型变形另一种构型约需 10 s 时间。
美国正在研制的可变形飞行器与传统的飞行器性能指标相比希望能够达到:机翼的展弦比可以实现变化量达到200%;机翼面积的变化量达到50%;机翼扭转角可以达到20°;后掠角的变化量为20°。与此同时,新概念下的变体飞行器机翼在重量上不超过传统机翼。

图3 MFX-2 变体飞机结构验证无人机Fig.3 MFX-2 MAS UAV
俄罗斯在再次兴起可变后掠翼研究浪潮中也不甘落后。1999年俄罗斯启动了新型轰炸机的设计工作,PAK-DA隐身战略轰炸机(设计图见图4)是俄罗斯研制的新型战略轰炸机。其意思解释为“远程航空兵未来航空复合体”,第一步概念设计已经在2009年完成,工程师们对现役3种轰炸机的特点进行了组合,从47个初始方案中选出4种作进一步的分析。整个研制工作将在2017年结束,有望从2019年或2020年实现量产。目前可见的几种设计方案中均采用了变后掠翼技术。

图4 PAK-DA隐身战略轰炸机设计图Fig.4 Design of PAK-DA stealthy strategic bomber
欧盟委员会的主动气动弹性飞机结构项目(Active Aeroelastic Aircraft Structures,3AS)提出利用机身的气动弹性变形来提高飞机效率的设计理念。通过不断地调整机翼的形状,确保飞机在所有飞行及负载条件下具有最佳效率[7-8]。
3.2 国内研究现状
近年来,与世界航空前沿同步的中国可变体飞行器研究得到了积极发展[9-12],国家自然科学基金、航空科学基金等资助了很多变后掠翼和变体飞行器科研项目。如2009年,中国航天空气动力技术研究院的李锋主持的国家自然科学基金重点项目“可变体飞行器气动原理与变形结构力学研究”以及“近空间高超声速可变体飞行器气动原理研究”等,带动了国内相关研究的兴起。
中国科学技术大学、哈尔滨工业大学、西北工业大学、北京航空航天大学、南京航空航天大学、南昌航空大学和中国航天空气动力技术研究院等高校和科研单位也在飞机机翼变形技术上积极探索,取得了一些阶段性成果。
从2012年开始,南昌航空大学开展了自适应弹性变后掠翼技术研究,期望通过机翼弹性变后掠机构设计,取消结构复杂、重量大的变后掠翼驱动装置,达到自动根据飞行马赫数或者动压变化(同时包含速度和高度变化)引起的气动力来驱动机翼后掠角改变,从而实现最佳的高速和低速性能。该研究计划在数值仿真完成之后,基于无人机平台进行风洞吹风和飞行试验。
4 结束语
变后掠翼技术从20世纪50年代发展到20世纪80年代,产生了以F-14和图-160为代表的一系列优秀飞机,然而,受限于当时的科技发展水平(材料科学、计算机技术、传感器技术、控制系统等),变后掠翼技术的发展遇到了瓶颈。飞机设计师采用了前缘机动襟翼、升力机身、边条翼等技术手段来提高超声速飞机在低速飞行时的升力,虽然这些替代技术在一定程度上缓解了飞机兼顾高低速度下的飞行与控制问题,但是与F-14战机能在任何飞行状态时改变后掠角来提升飞行性能相比,这些替代技术对飞机飞行性能的改善作用仍很有限。
采用变后掠翼技术是满足现代超声速飞机一系列相互矛盾要求的保证[2]。作为当前研究热点“飞机变形技术”中的一项主要内容,可变后掠翼技术伴随着材料、控制等技术发展,在新的历史时期有望实现重大突破。
然而变后掠翼技术想取得新的突破,在相关研究的基础上,还需要解决以下问题:(1)合理设计转动(驱动)机构以简化变后掠系统,解决飞机超重和可靠性问题;(2)选择适当的转轴位置,合理确定变后掠翼变化范围以减小气动中心的变化量;(3)综合考虑性能要求和操稳性要求。
针对变后掠驱动机构重量大、可靠性不理想的问题,除了采用具有自适应特点的弹性变后掠机构设计思想外,近年来迅速发展的形状记忆合金(SMA)也为可变后掠翼飞机的变后掠驱动系统提出了新的设计思路。形状记忆合金在外部刺激(热、电、磁、湿度、光等)作用下会产生较大的形变,在外部刺激消失后的一定时间里,又会恢复原来形状。SMA运用在机翼结构中,可以为机翼变形提供驱动力。利用飞机飞行时机翼受到的阻力及扭转力矩作为驱动力,只要找到飞机机翼阻力及扭转力矩随飞行速度变化关系,同时找出飞机各个飞行状态下的最佳后掠角度,这种自适应改变机翼后掠角的方法也为变后掠翼技术提供了一种解决思路,是否可行,尚且需要进一步的研究。
参考文献:
[1] 方宝瑞.飞机气动布局设计[M].北京:航空工业出版社,1997:361-394.
[2] F C 比施根斯.超声速飞机空气动力学和飞行力学[M].郭桢,译.上海:上海交通大学出版社,2009:117-153.
[3] 吴俊.变形翼分布式协同控制技术研究[D].南京:南京航空航天大学,2011.
[4] Michael Love,Scott Zink,Ron Stroud,et al.Impact of actuation concepts on morphing aircraft structures[R].AIAA-2004-1724,2004.
[5] Andersen G,Cowan D,Piatak D.Aeroelastic modeling,analysis and testing of a morphing wing structure[R].AIAA-2007-1734,2007.
[6] Ramrkahyani Deepak S,Lesieutre George A.Aircraft structural morphing using tendon actuated compliant cellular trusses[R].AIAA-2004-1728,2004.
[7] Michael Amprikidis,Jonathan Cooper,Chris Rogerson,et al.On the use of adaptive internal structures for wing shape control[R].AIAA-2005-2042,2005.
[8] Suleman A,Moniz P A.Active aeroelastic aircraft structures[C]//III European Conference on Computational Mechanics:Solids,Structures and Coupled Problems in Engineering.Lisbon:Springer,2006.
[9] 陈钱,白鹏,李锋.可变形飞行器机翼两种变后掠方式及其气动特性机理[J].空气动力学学报,2012,30(5):658-663.
[10] 程勇.无人机变后掠翼机构设计及仿真实验研究[D].合肥:中国科学技术大学,2010.
[11] 朱华,刘卫东,赵淳生.变体飞行器及其变形驱动技术[J].机械制造与自动化,2010,39(2):123-125.
[12] 陈钱,尹维龙,白鹏,等.变后掠变展长翼身组合体系统设计与特性分析[J].航空学报,2010,31(3):506-513.
