常值风对无人机空中飞行自由运动的影响
2014-09-17高九州段镇贾宏光
高九州, 段镇, 贾宏光
(1.中国科学院 长春光学精密机械与物理研究所, 吉林 长春 130033;2.中国科学院大学 大珩学院, 北京 100039)
0 引言
小型无人机结构简单、造价低廉、用途广泛,既可用于航拍、勘探、测绘、监测等民用方向,又可用于侦察、干扰、对抗、打击等军事用途。小型无人机固然灵活机动,但由于其重量轻、体积小、速度低,其在执行任务的过程中更易受到大气环境的影响,例如常值风、切变风、风紊流等[1-2]。统计数据表明,每三次天气因素造成的飞行事故中,就有1次是恶劣风况导致的。因此,研究风场对于无人机飞行姿态和航迹的影响是十分必要的。
对于大气风对无人机飞行姿态和航迹影响的研究,国外传统的方式是通过飞行试验采集数据,但该方法受经济、安全和测试等技术因素的制约,同时,地形、气候、时间的变化对试验结果也会产生较大的影响。近年来,飞行力学、计算机仿真等学科的飞速发展和交叉融合,使得依靠计算机仿真对环境影响进行量化评估成为可能,并具有高效、经济、安全、数据可靠等优点。该方法已逐渐成为工程实践中必不可少的方法之一,并在国内外得到广泛应用。
本文以中科院自主研发的某型无人机为例,将所建立的常值风场模型与六自由度空中飞行模型相融合,在不加控制系统的条件下,给出在定值风作用下的无人机空中飞行各状态量的变化情况,并分析其产生原因。
1 常值风场效应
假设大气环境为自西向东的常值风,则无人机不同飞行航迹状态下,地速、风速和空速三者之间的关系如图1所示[3-5]。图中,vm为地速;vw为风速;vmw为空速。
以图1中D情况为例进行定性分析,在不考虑飞行迎角,但考虑侧滑角的条件下,空速、地速与风速三者的合成关系如图2所示。

图2 侧滑角变化Fig.2 Change of sideslip angle

vm=vmw+vw
(1)
2 常值风飞行六自由度模型
在地面坐标系中,常值风场:
(2)
将该风场投影到无人机机体坐标系下:
(3)
坐标转换矩阵为:
无人机机体坐标系下风速变化率为:
(4)

地速的初始值:
(5)
坐标转换矩阵为:
式中,α0为初始迎角;β0为初始侧滑角。
空速为:
(6)

(7)


(8)

(9)
在机体坐标系下,无人机空中飞行合力及合力矩为:
(10)
(11)

综上所述,无人机空中飞行动力学方程可归纳为:
(12a)
(12b)
3 常值风场下无控飞行仿真分析
定义自西向东的常值风为正向风。利用Matlab/Simulink搭建六自由度无控飞行系统,进行仿真分析[6-7]。仿真条件:初始航向角为0°(7 m/s常值纵风时为90°);初始速度为42 m/s;初始迎角为3.2°;初始侧滑角为0°。
(1) 7 m/s常值横风下的自由运动
当空中含有横向风7 m/s作用时,短时间内,无人机在风场中沿风场方向产生横向正位移,但横向风作用主要集中在垂直尾翼上,故偏航角ψ<0°,机头左偏,航迹为负。状态参量振荡稳定后,滚转角φ>0°,则飞行航迹变为右盘旋。其航迹与各状态参量变化如图3~图5所示。
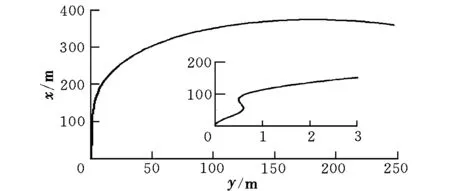
图3 飞行航迹Fig.3 Flight path
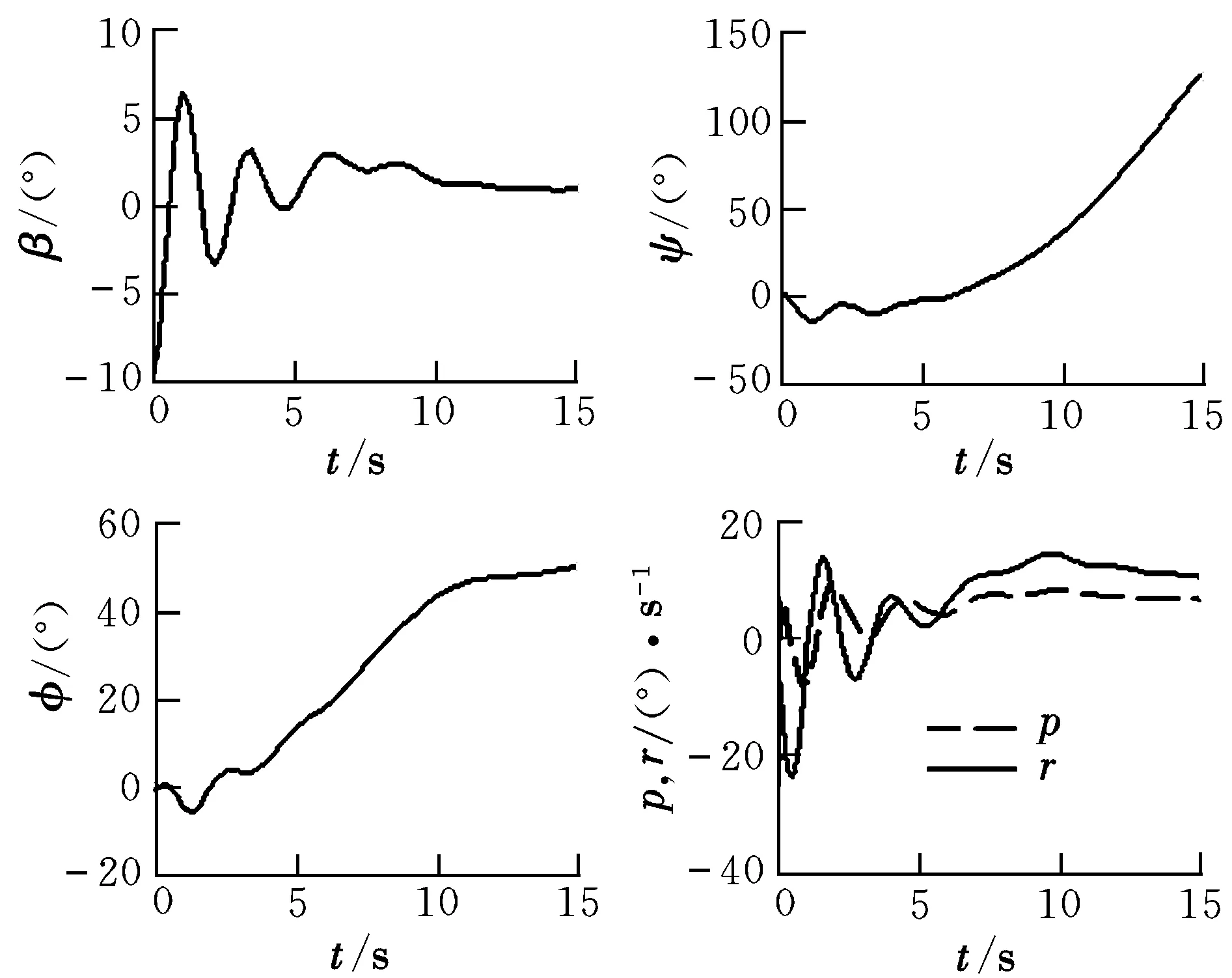
图4 横向状态参数变化Fig.4 Transverse state change
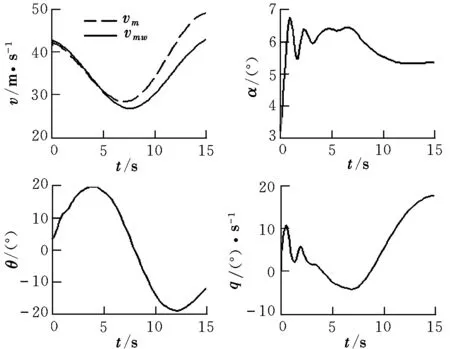
图5 纵向状态参数变化Fig.5 Longitudinal state change
(2) 7 m/s常值纵风下的自由运动

图6 飞行航迹Fig.6 Flight path

图7 横向状态参数变化Fig.7 Transverse state change

图8 纵向状态参数变化Fig.8 Longitudinal state change
(3)-7 m/s常值横风下的自由运动
当空中含有横向风-7 m/s作用时,短时间内,无人机在风场中沿风场方向产生横向负位移,但横向风作用主要集中在垂直尾翼上,故偏航角ψ>0°,机头右偏,航迹为正。状态参量振荡稳定后,滚转角φ>0°,则飞行航迹变为右盘旋。其航迹与各状态参量变化如图9~图11所示。
图9 飞行航迹Fig.9 Flight path

图10 横向状态参数变化Fig.10 Transverse state change
图11 纵向状态参数变化Fig.11 Longitudinal state change
4 结束语
飞行力学与飞行参数的了解、掌握及应用对飞行控制系统的设计至关重要,本文在某小型样例无人机飞行控制系统设计的背景下,为掌握其性能参数,研究了风场对其飞行轨迹和姿态的影响。首先建立了常值风场下飞行全量六自由度模型,然后基于Matlab/Simulink无人机飞行六自由度模型,分别在横风7 m/s 、纵风7 m/s、横风-7 m/s的条件下进行空中飞行自由运动仿真,通过对仿真结果的分析,得出本样例无人机质量结构不对称性的结论,并分析出在不同横风作用下飞行过程中各运动状态的变化原因,对控制系统设计、飞行包线和飞行品质的评估具有重要的参考价值。
参考文献:
[1] 肖业伦,金长江.大气扰动中的飞行原理[M].北京:国防工业出版社,1993.
[2] 方振平,陈万春,张曙光.航空飞行器飞行动力学[M].北京:北京航空航天大学出版社,2005.
[3] Woodfield A A,Woods J F.Worldwide experience of wind shear during 1981~1982[R].AGARD CP,1983:23-27.
[4] Frost W,Chang H P.Simulated flight through JAWS wind shear[J].Journal of Aircraft,1984,21(10):44-48.
[5] Frost W,Roland L B.Wind shear terms in the equations of aircraft motion[J].Journal of Aircraft,1984,21(11):17-21.
[6] 田琦.飞行模拟机大气干扰仿真及气动数据库设计[D].天津:中国民航大学,2007.
[7] 荣辉,李冬,殷堂春.基于Matlab 无人机数学模型仿真分析与研究[J].科学技术与工程,2008,8(6):1510-1512.
