直升机尾桨涡环边界的计算
2014-09-17孙文胜马鸿儒
孙文胜, 马鸿儒
(海军航空工程学院 青岛分院, 山东 青岛 266041)
0 引言
直升机在垂直下降或斜下降时,旋翼下方来流对旋翼诱导速度气流形成挤压,严重时造成气流向下排出又重新吸入,在桨盘附近形成涡环[1],使直升机拉力下降、扭矩脉动,直升机难以控制从而造成危险。经过国内外技术人员的长期研究,已对涡环状态的形成和特性有了比较充分的认识。辛宏等[2]通过试验得到了高-辛判据,用来计算直升机下降过程中进入涡环状态的速度边界条件,已得到了普遍采用,同时对直升机尾桨涡环也具有适用性[3]。但是对于直升机尾桨涡环尤其是进入尾桨涡环的速度边界的研究远远不够。
本文对直升机尾桨涡环的特点进行了研究,并利用高-辛判据计算直升机进入尾桨涡环的临界速度,包括临界前飞速度、临界侧飞速度和临界悬停回转角速度,根据计算结果,绘制了直升机尾桨涡环的边界曲线,分析了侧滑、前飞速度之间的关系,对直升机飞行安全具有实际的指导意义。
1 尾桨涡环的特点
与主旋翼类似,直升机尾桨在工作中以产生诱导速度来提供拉力,以此平衡主旋翼产生的反扭矩并进行航向操纵,因此在某些特定条件下如悬停回转、悬停于侧风中或倒飞有可能使尾桨进入涡环状态,此时流场基本特点如图1所示。
由图可见,对于右旋直升机来说,右侧飞速度是引起其进入尾桨涡环的直接因素,因此右侧飞速度和左转弯角度不宜过大;一旦进入尾桨涡环状态,即建立起图中所示的流场,要使此流场消散,最佳方法是增加与速度V垂直的速度分量,即使直升机前飞、下降或上升。

图1 尾桨涡环状态Fig.1 Tail rotor vortex ring state
2 涡环状态判据
相比Wolkovitch判据和Peters判据,高-辛判据更适合于尾桨涡环的判定:当相对来流矢量在旋翼尾流速度矢量反方向上的投影超过某一临界值时,旋翼进入涡环状态,且这一临界值就是临界垂直下降率。经试验测定,扭矩平均值异常脉动是发生涡环现象的首要特征,此时,临界垂直下降率为:
Vcr(90°)=0.28Vh
式中,Vh为等效悬停诱导速度。消去Vh,得到无因次的判据公式:

3 尾桨涡环边界的计算及分析
3.1 等效诱导速度
已知某条件下的直升机参数:尾桨半径Rtr(m)、尾桨转速Ωtr(rad/s)、尾桨中心距离机体坐标原点的水平距离L(m)、旋翼半径Rm(m)、旋翼转速nm(r/min)、稳定悬停时对应的功率P(kW)和桨尖损失系数K。另外假设已知某飞行状态下的飞行高度H(m)、当地海拔高度Hloc(m)和当地气温t(℃)。计算过程如下:
飞行高度H处的气温为:
T=t-0.0065×(H-Hloc)
大气密度为:
旋翼轴扭矩为:
尾桨拉力系数为:
根据滑流理论计算出悬停时的尾桨等效诱导速度为:
3.2 临界速度
类似于临界下降率,临界侧飞速度就是直升机侧飞时进入尾桨涡环的最小速度,大小为0.28Vhtr,该速度与尾桨中心距离机体坐标原点水平距离L(m)的比值即为悬停回转角速度的临界值。表1和表2为某型直升机在不同高度和地面温度下飞行的尾桨涡环速度临界值。
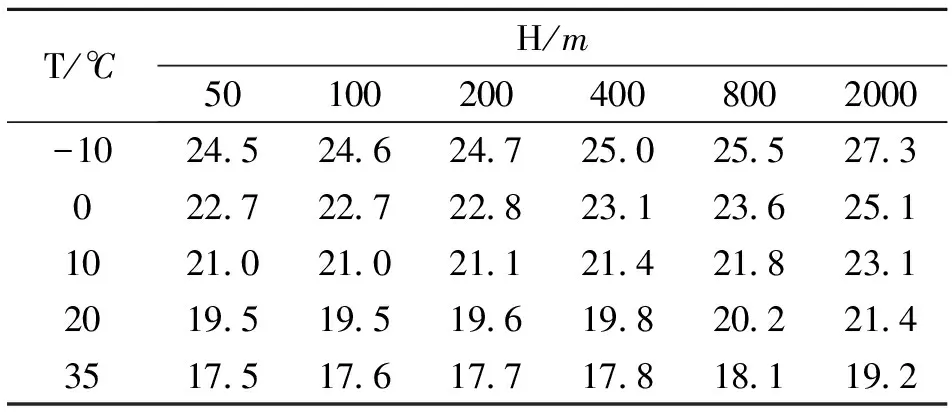
表1 某型直升机尾桨涡环侧飞速度临界值Table 1 Critical lateral rates for tail rotor VRS of a certain type helicopter (km/h)
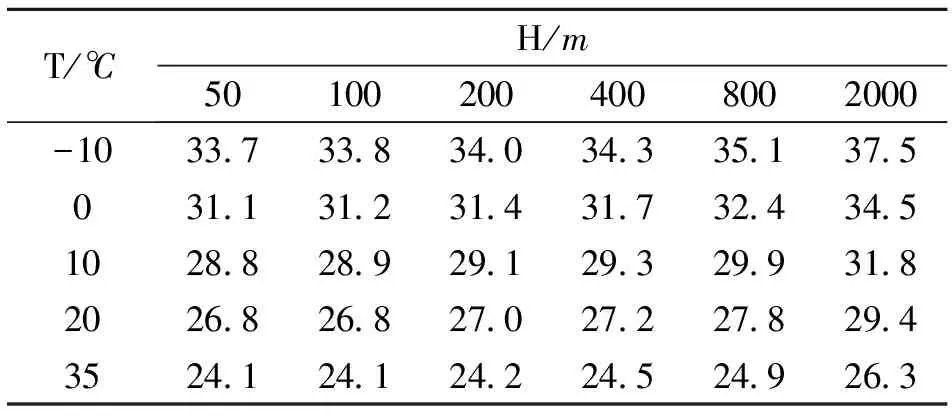
表2 某型直升机尾桨涡环悬停回转角速度临界值Table 2 Critical whirling speed when hovering for tail rotor VRS of some certain helicopter ((°)/s)
观察表1、表2可以总结出,直升机飞行高度和地面温度对尾桨涡环临界值都有影响:随着飞行高度的降低,直升机侧飞或悬停回转进入尾桨涡环的(角)速度有所降低;温度越高,直升机进入尾桨涡环状态(角)速度就越低。
3.3 尾桨涡环边界曲线
由于涡环判据计算的是涡环发生的初始时刻的条件,此时的诱导速度计算仍可以采用滑流理论[4],因此选择前飞状态下的动量理论作为补充方程:
经计算,该型直升机在高度2000 m,地面温度35℃条件下飞行时,其尾桨涡环边界曲线如图2所示。

图2 尾桨涡环边界曲线Fig.2 Tail rotor vortex ring boundary curve
图中,曲线将直升机水平面内速度域分为安全区域和涡环区域,对图中曲线进行如下分析:
(1)直升机侧飞达到一定速度,就可能进入涡环状态,当直升机具有足够的前飞速度时,即使侧向速度再大也不会进入尾桨涡环状态。
(2)直升机垂直侧飞时进入涡环状态的速度最小。斜向飞行时,随前飞速度的增大,进入涡环区域时的侧向速度也在变大。说明直升机不带前飞的垂直侧飞或悬停回转是最易进入尾桨涡环状态的。
(3)仿照安全下滑角,可以定义——直升机以小于该角度侧飞时,不会有发生涡环事故的危险。根据计算,该直升机安全侧滑角在220°~320°范围之外。
(4)临界速度值本质反映的是相对速度,因此图中某一角度下的临界速度既可以表示直升机以该角度侧飞允许的最大速度,也可以表示为直升机在悬停时所能承受的从该方向吹来的最大风速。因此类似于舰载直升机起飞/着舰风限图,可称该图为“悬停风限图”。
图2中的边界参数取值因机型而异,但是各机侧飞进入尾桨涡环状态的基本特点是一致的,因此上述原则对直升机的安全飞行有一定的指导意义。
4 结束语
本文分析了尾桨涡环状态的特性,利用高-辛判据对尾桨涡环边界进行了求解,结果表明,直升机进入尾桨涡环状态的临界速度受到飞行高度和地面温度等因素的影响。对于右旋直升机而言,在其水平面速度域范围内的右半部分存在涡环区域,在一定侧滑角范围内的右侧飞以及悬停于右侧风中或左转弯时有进入尾桨涡环状态的可能,应谨慎操纵直升机加以避免。进一步的研究可将该理论模型应用于机载涡环告警系统的开发,以使飞行员能更好地规避这一危险状态。
参考文献:
[1] 王适存.直升机空气动力学[M].南京:航空专业教材编审组,1985:141-142.
[2] 辛宏,高正.直升机涡环状态速度边界的试验研究[J].南京航空航天大学学报,1995,27(4):439-443.
[3] 汤连刚,朱宇,李显耀,等.直升机尾桨涡环飞行试验研究[J].飞行力学,2008,26(5):63-66.
[4] 辛宏.旋翼非定常气动特性的理论和试验研究[D].南京:南京航空航天大学,1995.
