空间对接机构缓冲试验台对连接分离试验的影响*
2014-09-17张华肖余之
张华 肖余之
(1.上海市空间飞行器机构重点实验室,上海 2 01108)(2.上海宇航系统工程研究所,上海 2 01108)
空间对接机构缓冲试验台对连接分离试验的影响*
张华1,2†肖余之2
(1.上海市空间飞行器机构重点实验室,上海 2 01108)(2.上海宇航系统工程研究所,上海 2 01108)
为了模拟空间的分离过程,在地面上研制了具备五自由度的大型缓冲试验台,以此研究在对接分离过程中运输飞船和空间站相对分离速度、姿态角及姿态角速度等的变化规律.本文建立了地面环境及空间零重力环境两种状态下的理论分离模型,对比了两种状态下的分离过程和结果;同时还建立了两种状态下的全数值样机仿真模型,依据某工况下的试验条件,计算分析了运输飞船和空间站在分离过程中的运动特性.从理论和数值仿真两方面阐述了缓冲试验台在模拟分离时的情况,论证了利用缓冲试验台模拟空间状态下两飞行器分离过程的有效性.
空间对接机构, 缓冲试验台, 连接分离, 仿真
引言
空间对接机构是运输飞船与空间站实现空间交会对接的关键机构[1-5].当两个交会的飞行器满足一定的对接初始条件后[6-8],从接触的瞬间起,对接机构需完成捕获、缓冲、校正、拉近和密封连接等一系列连接功能[9-10],并满足一定的姿态和速度要求的安全分离功能.空间对接机构对两飞行起的对接、分离成功起着至关重要的作用,因此,如何做好充分的地面模拟试验非常重要.
为了模拟太空零重力下的对接过程和分离过程,特别研制了缓冲试验台来模拟试验.该试验台是我国首创的对接机构缓冲试验装置,设想通过该试验台进行对接分离过程的全物理全过程试验,验证对接机构设计的正确性.
从理论上开展了缓冲试验台对连接分离的影响分析,论述了地面模拟试验和空间零重力环境下两飞行器在分离瞬间的运动对比情况;最后通过建立空间对接机构和缓冲试验台的全数字虚拟样机模型及相应的仿真计算,对理论分析的结果进行了验证.
1 缓冲试验台的结构及参数
缓冲试验台的结构简图如图1所示,空间对接机构包含主动对接机构和被动对接机构,主动对接机构与主动飞行器相连,称之为主动端如图1左端所示,被动对接机构与目标飞行器相连称之为被动端如图1右端所示.为方便研究,本文取其中之一的主动端单体作为研究对象,坐标系的定义见图2.
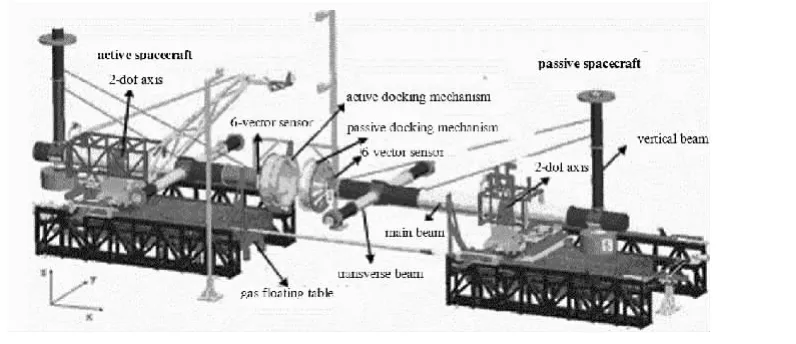
图1 含空间对接机构的缓冲试验台模型Fig.1 Buffering Test Table Model
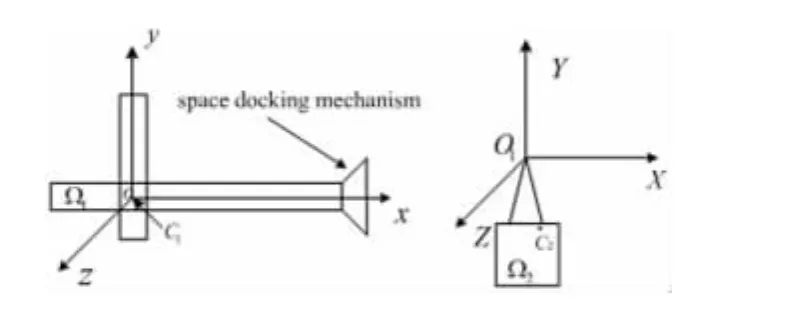
图2 定义坐标系Fig.2 Definition of the Coordinates System
为了用数学模型来分析描述飞行器在分离时的运动特性,本文提取了飞行器和对接机构的主要力学和物理参数:飞行器的质量惯量特性,对接机构的分离推杆和对接锁系的力学参数以及由它们在分离过程中产生的附加力矩等等;缓冲试验台主要影响参数:重力平衡装置,缓冲试验台机械装置的摩擦阻力矩等.

图3 空间对接机构示意图Fig.3 Schematic Plan of Space Docking Mechanism
Ω1是模拟器,包含主动对接机构、主动飞行器及相应的配重,质量为m1,Ω2是二维转台,质量为m2,见图3,Ω1在Y向与地相连,其余2个方向移动和3个方向转动放开,因此该试验台具有5个自由度.o-xyz为动坐标系,固结在Ω1上的,o是回转中心;O1-XYZ为固定坐标k系,初始时刻与oxyz重合.
2 缓冲试验台理论模型
2.1 广义坐标的选取
基于图2定义的坐标系,取o点在XZ平面上的位移u、w为广义位移,再加上Ω1绕o转动的三个角φ、θ和ψ作为转动的广义坐标∶φ为俯仰角,θ为滚转角,ψ为偏航角,它们依次绕ix2转动ψ、绕ix3转动φ、绕ix1转动θ,如图4所示.
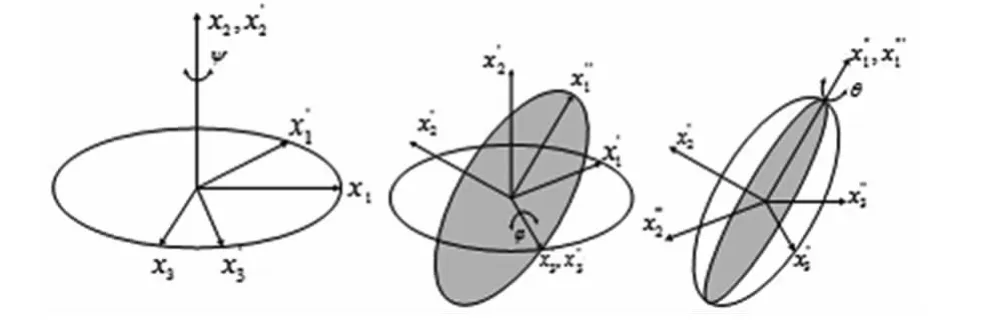
图4 广义坐标选取Fig.4 Definition of Generalized Coordinates
通过图4可以得到从O1-XYZ系到o-xyz系的变换矩阵A:

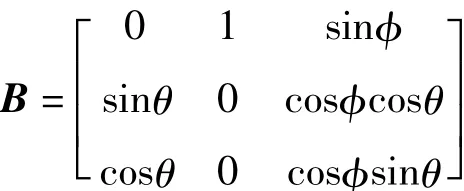
三个方向的角速度与姿态角关系为:

B为变换矩阵,表示为
2.2 系统动能
系统的总动能由下式(2)表述,T1和T2分别为模拟器和二维转台的动能:

表示为广义形式为:

式中{~v}为广义速度:

D为一包含模拟器和二维转台质量惯量特性及运动方向角的矩阵,可简化为:

ε为模拟器惯性积与主惯量的比值(ε≪1)
2.3 广义载荷
四根分离推杆中每一根的推力都作用在对接框面上见图3,且沿x(负)方向(见图3):

Fi是第i根推杆作用的推力,uxi(≤0)是第i根杆的端面在x方向的位移,F0,k分别为推杆的预紧力和弹性常数,s0是弹簧推杆的最大伸出长度.M0为二维转台机械装置的转动阻力矩.分离推杆作用在o点的力和力矩可简化为:

这里},}分别为广义力和广义位移
通过第二类拉格朗日方程

得到动力学方程式(7):

3 空间零重力环境理论模型
为便于对比,坐标系的选取与上述相同,广义坐标选o点的位移u、v、w和绕o点的转动φ、θ、ψ,只是增加y向的位移,质量惯量特性和Ω1与Ω2之和等效.
同样道理可以通过系统动能,利用第二类拉各朗日方程可以得到该种状态下动力学方程:


4 两种模型结果对比
将各类输入条件如质量惯量特性、作用载荷、空间对接机构尺寸等带入式(7)和式(8)可以分别获得各个自由度方向的分离速度,归纳总结见表1:

表1 两种模型的速度结果对比Table 1 Results comparison between the two models
缓冲试验台理论模型和空间零重力理论模型两种情况下的运动方程在形式上是一致的,都是由第二类拉格朗日方程导出,由动力学方程式(7)和式(8)及表1的计算结果的比较,主要区别在于:
(1)两者自由度不同,空间比缓冲试验台多了关于质心y向位移的第二个方程,这个方程与其它自由度的耦合体现在力向量中,但其它5个方程并不与它发生耦合;
(2)缓冲试验台中的二维转台与模拟器并非完全一体,发生俯仰角后导致总的绕y轴的转动惯量发生变化,体现在D和D'阵中;
(3)b0,d0为分离推杆与对接锁解锁时引起的初始俯仰角和偏航角,t为对接锁解锁到飞行器分离所需的时间(毫秒级).从表1可以看出两种模型得到的结果除滚转角速度外基本一致,但滚转角速度由于本身量级就非常小(10-3deg/sec以下),本文认为该差别可以忽略.
(4)从表1的计算结果来看,缓冲试验台在我们关心的精度范围内真实反映了空间零重力环境下的分离运动情况.
5 虚拟样机动力学仿真
依据空间对接机构和缓冲试验台的性能参数与设计原理,建立了两种理论模型的全数字虚拟样机模型,见图5和图6.

5 包含空间对接机构的缓冲试验台动力学模型Fig.5 Dynamics Model of Buffering Test Table

图6 空间零重力下的仿真分离模型ig.6 Dynamics Model of Docking Mechanism under the Space Zero Gravity
本文随机抽取了地面试验中的一组工况,给出了两种模型计算出的结果对比,在滚转方向上的角速度虽然两者的离散性比较大,但是它们本身的绝对数值却非常小(基本在10-3deg/sec量级),可以认为两者没有影响,同样在横向(Y向偏航和Z向俯仰)的线速度相比分离方向小了2个数量级(毫米级),本文就不赘述列举;具体结果如图7~图12所示.

图7 分离方向(X向)的线速度0.180m/s(缓冲试验台模型)Fig.7 Velocity along the X direction(Buffering test table model)

图8 Y向的分离角速度0.41deg/sec(缓冲试验台模型)Fig.8 Angle velocity around the Y direction(Buffering test table model
上述仿真结果图9和图12曲线中出现了速度变化尖点,其原因与空间对接机构解锁的不同步性和分离推杆作用力相关,当最后一把对接锁解锁时,分布在该方向上的分离推杆由于被压缩的相对厉害,产生的推力会相对较大,使得飞行器姿态角速度有一个“纠偏”动作,表现在分离曲线上就会出现如图9和图12的下凹变化,地面试验曲线与仿真曲线比较吻合,后续会进行相关报道.从仿真结果上进行横向比较,两种状态在分离速度上非常接近,可以认为没有差异;在偏航和俯仰方向两种状态的角速度也非常接近,基本上两种模型的结果比值在1的附近.依据以上分析结果可以推断,空间对接机构缓冲试验台对连接分离试验不会带来影响,利用缓冲试验台进行的地面连接分离试验可以有效反映空间零重力环境的分离过程.
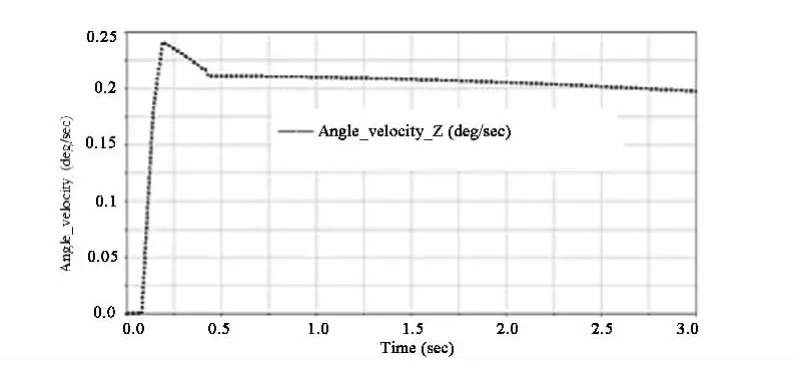
图9 Z向的分离角速度0.21deg/sec(缓冲试验台模型)Fig.9 Angle velocity around the Z direction(Buffering test table model)

图10 分离方向(X向)的线速度0.184m/s(空间零重力模型)Fig.10 Velocity along the X direction(Space zero-gravity model)

图11 Y向的分离角速度0.43deg/sec(空间零重力模型)Fig.11 Angle velocity around the Y direction(Space zero-gravity model)
图12 Z向的分离角速度0.22deg/sec(空间零重力模型)Fig.12 Angle velocity around the Z direction(Space zero-gravity model)
6 结论
本文从理论上论述了空间对接机构缓冲试验台对分离试验的影响,同时建立了相应的全数字样机模型.理论分析和仿真计算结果表明,缓冲试验台能够模拟空间零重力环境下运输飞船和空间站的分离过程与运动特性,从而确认了在地面上获得的大量分离试验数据真实有效.
1 娄汉文,曲广吉,刘济生.空间对接机构.北京:航空工业出版社,1992:30~70(Lou H W,Qu G J,Liu J S.Space docking mechanism.Beijing:Aviation Industry Press,1992:30~70(in Chinese))
2 郑永煌.空间交会对接技术.自然杂志,2011,6:311~315(Zheng Y H.Rendezvous and docking technology for space flight.Chinese Journal of Nature,2011,6:311 ~315(in Chinese))
3 张柏楠.航天器交会对接任务分析与设计.北京:科学出版社,2011,6:358 ~417(Zhang B N.Analysis and design of aerocraft rendezvous and docking.Beijing:Science Press,2011,6:358~417(in Chinese))
4 Rendezvous F W.Docking technology development for future european missions.ESA,1985:1~16
5 Endo E,Mitsuma H,et al.Berthing and docking mechanisms for Japanese space structure.AIAA,1990,90 -0561:1~11
6 Nease A.Shuttle MIR Missions Precursor to international space station alpha.AIAA,1994,94-4603:1~5
7 Ghofranian S,Schmidt M ,McManamen J,Schliesing J,Briscoe T.Space shuttle docking to Mir mission.AIAA,1995,95-1196:333~339
8 陈宝东,郑云青,邵济民等.对接机构分系统研制.上海航天,2011,6:1~6(Chen B D,Zheng Y Q,Shao J M,et al.Development of docking subsystem.Aerospace Shanghai,2011,6:1 ~6(in Chinese))
9 张崇峰,肖余之,李明福.飞行器对接机构缓冲器的设计研究.哈尔滨工业大学学报,1998,30(5):111~114(Zhang C F,Xiao Y Z,Li M F.Design method for buffer of aerocrafts docking mechanism.Journal of Harbin Institute of Technology,1998,30(5):111~114(in Chinese))
10 张华,肖余之,陈萌,杜三虎.空间对接机构对接锁系同步性仿真研究.宇航学报,2009,30(1):310~314(Zhang H,Xiao Y Z,Chen M,Du S F.Study on synchronization of space docking mechanism’s docking lock.Journal of Astronautics,2009,30(1):310 ~ 314(in Chinese ))
*The project supported by Shanghai Science and Technology Committee Fund(06dz22105)
† Corresponding author E-mail:Robin_moon@sohu.com
EFFECT ANALYSIS OF SPACE DOCKING MECHANISM BUFFERING TEST TABLE UPON THE CONNECTION AND SEPARATION EXPERIMENT*
Zhang Hua1,2†Xiao Yuzhi2
(1.Shanghai Key Laboratory of Spacecraft Mechanism,Shanghai201109,China)(2.Aerospace System Engineering in Shanghai,Shanghai201109,China)
Space docking mechanism was used to realize the space docking and separation for the aircraft and space station.In order to simulate the process of space separation,the buffering test table was developed to study the variety rule attitude angle and attitude angle velocity of the aircraft and space station.At the same time,the digital prototype model was built to analyze the movement characteristics of the space vehicles.Comparing the results obtained from the two analysis methods,this paper demonstrates the effect of the buffering test table on connection and separation experimentation.
space docking mechanism, buffering test table, connection and separation, simulation
20 June 2014,
20 July 2014.
10.6052/1672-6553-2014-058
2014-06-20 收到第 1 稿,2014-07-20 收到修改稿.
*上海市科学技术委员会资助项目(06dz22105)
E-mail:Robin_moon@sohu.com
