高速开关磁阻电机的变频调速控制
2014-09-11何雅慧韦忠朝
何雅慧,韦忠朝
(华中科技大学电气与电子工程学院,湖北武汉 430074)
高速开关磁阻电机的变频调速控制
何雅慧,韦忠朝
(华中科技大学电气与电子工程学院,湖北武汉 430074)
通过结合开关磁阻电机调速系统的两种控制方式——电流斩波控制和角度位置控制,在Matlab/Simulink的环境下建立仿真模型,使得开关磁阻电机的转速能在0~10000r/min的宽范围内进行平滑调节。仿真结果表明,该仿真模型设计较为合理,对转速的调节能够达到预期效果。
开关磁阻电机宽范围调速;电流斩波控制;角度位置控制
开关磁阻电机调速系统作为一种新型的调速系统,以其优良的调速性能日益受到人们的广泛关注,成为当代电气传动发展的热门话题之一[1]。它融新的电动机结构——开关磁阻电动机(Switched Reluctance Motor,简称SRM)与现代电力电子技术、控制技术为一体,兼有异步电动机变频调速系统和直流电动机调速系统的优点[2]。近20年来,国内外对开关磁阻电机调速系统的发展给予了高度关注,目前已在很多领域中广泛应用。为了使开关磁阻电机调速系统满足不同的需求,电机的转速必须能在较宽的转速范围内进行平滑调速。本文在Matlab/Simulink的环境下建立仿真模型,通过各个子模块的配合作用,达到转速在0~10 000r/min的范围内平滑调节的目的。
1 开关磁阻电机调速系统的控制方式
1.1 电流斩波控制CCC
对于给定的SRM,在最高外施电压Usmax、允许的最大磁链ψmax与最大电流ip条件下,存在一个临界角速度wb,它是SRM能得到最大转矩的最高角速度,这一临界角速度称为“基速”[3]。
SRM在低于基速下运行时,采用电流斩波控制。常见的电流斩波控制方式是保持开通角和关断角不变,通过主开关器件的多次导通和关断将电流限定在给定的上、下限值之间,并以此控制转矩。典型的电流斩波方式的相电流波形见图1[4]。
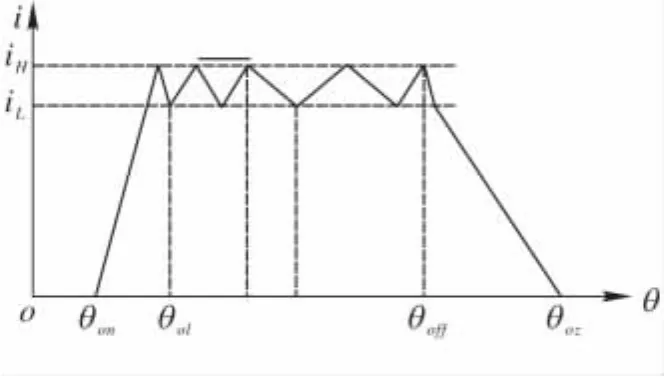
图1 电流斩波波形图
如图1所示,当θ=θon时,主开关器件接通,相电流i从零开始上升,当相电流上升到上限值iH时,开始斩波,即主开关器件关断,相电流i下降;当相电流下降到下限值iL时,主开关器件重新导通,相电流i便开始上升。如此主开关器件反复通断,使相电流控制在上限值iH和下限值iL之间,直到θ=θoff时,主开关器件关断,相电流i一直下降到零。
1.2 角度位置控制APC
当SRM在高于基速的速度范围内运行时,采用角度位置控制。角度位置控制是指在加在绕组上的电压一定的情况下,通过改变绕组上主开关的开通角和关断角,来改变绕组的通电、断电时刻,调节相电流的波形,实现转速闭环控制。
角度位置控制有三种方式:保持开通角不变改变关断角、保持关断角不变改变开通角、同时改变开通角和关断角。改变开通角,可以改变电流波形的宽度、峰值和有效值的大小,还可以改变电流波形与电感的相对位置,从而改变了电机的转矩和转速;而关断角一般不影响电流的峰值,但可改变电流波形的宽度及其与电感曲线的相对位置,进而改变电流的有效值。在开关磁阻电机控制中一般采用固定关断角,改变开通角的控制方法。
2 仿真模型的建立
调速系统的仿真模型见附录I,本调速系统的基本思路为在0~5 000r/min的低转速范围内采用电流斩波控制(CCC),在5 000~10 000r/min的高转速范围内采用角度位置控制(APC)。为了使转速的调节更加平滑有效,对转速的分段进行了细化。经过反复试验,本调速系统最终将转速范围分成六段:0~500r/min、500~1500r/min、1 500~3 500 r/min、3 500~5 000r/min、5 000~8 000r/min、8 000~10 000r/min。根据设定转速值的大小,选择不同的子模块进行调节,结合每个子模块不同的PI环节,使电机转速稳定在设定值。
3 仿真模型的分析
当电机的转速低于5 000r/min时,采用的是电流斩波控制方式。以转速为0~500r/min的子模块为例进行说明,如图2所示。当设定的转速值小于500r/min时,该模块工作。在这一模块中,给定固定的开通角和关断角,通过电流斩波的方式达到转速控制的目的。电流上限值是由转速的差值经过一个PI环节来整定的,当转速在设定转速以下时,转速的差值Δn为正,则PI环节输出的是一个一直增大的电流上限值。PI输出的最大值为200,即设定的最大电流上限值为200A。

图2 调速范围为0~500r/min的子模块
若实际测得的电流没有达到PI环节输出的电流上限值,则在开通角和关断角的范围内,主开关器件一直导通,电压加在绕组两端,使得绕组中通过的相电流上升,电机转速继续增加,直到达到设定的转速值;当电机转速超过设定的转速时,转速的差值Δn为负,PI环节输出的电流上限值减小,当实际测得的电流超过PI环节输出的电流上限值时,主开关器件关断,电流下降,迫使转速降低;如此反复,电机的转速就可在设定的转速值附近波动,最终稳定在转速设定值。转速0~5 000r/min的其他子模块均采用相同的原理,为了满足不同转速的调节需要,各个子模块PI环节略有差异,使得超调量和调节时间在合理范围内。当转速大于5 000r/min时,采用角度位置控制方式,下面以5 000~8 000r/min的子模块为例进行说明。
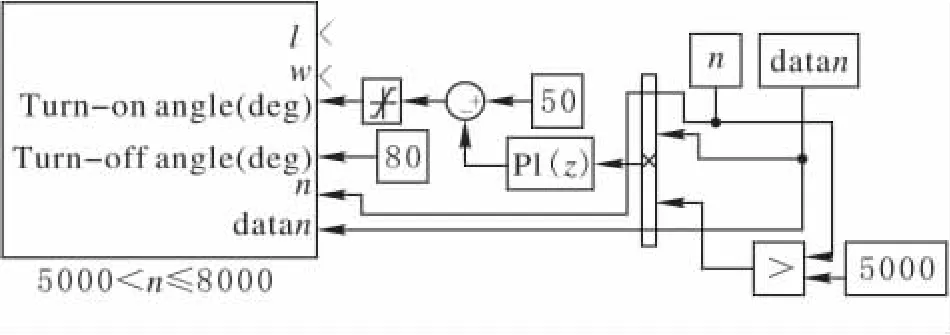
图3 调速范围为5 000~8 000r/min的子模块
在该子模块的调节范围中,转速较高,电流斩波控制方式达不到转速调节的要求,所以采用角度位置控制方式进行调节。如图3所示,设定关断角为定值,对开通角的大小进行调节。开通角的大小随转速的变化而变化,引入一个PI环节,当设定转速大于实际测得的转速,即转速的差值Δn>0时,开通角提前,转速继续上升;当转速的差值Δn<0时,PI环节输出值适当减小,使得开通角推后,如此反复,就能确定一个适当的开通角,使得转速稳定在设定值。转速8 000~10 000r/min的子模块也采用相同原理,不同的是其开通角的初始值为40°。
4 仿真结果
针对各个子模块选取一个设定转速,仿真结果如图4~图9。
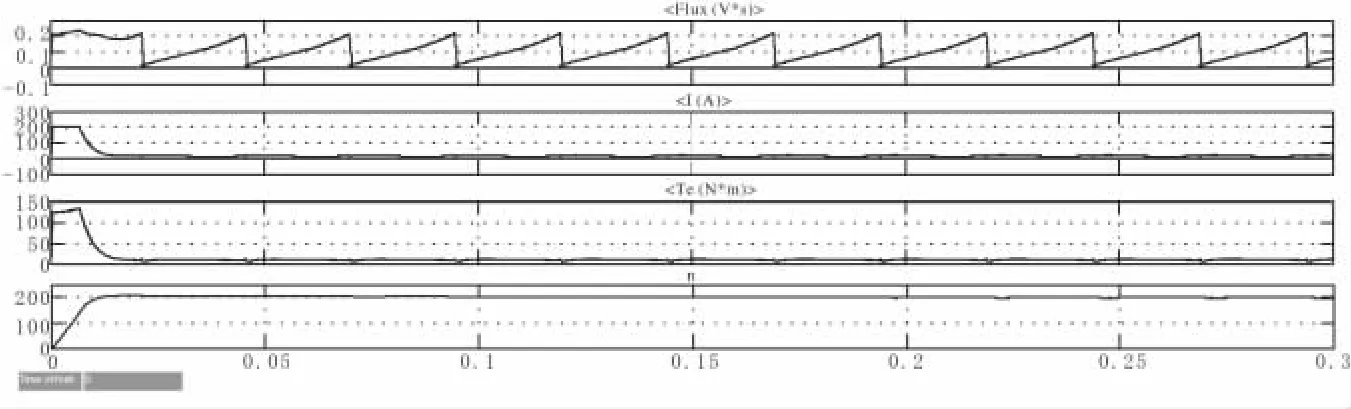
图4 设定转速为200r/min控制仿真波形
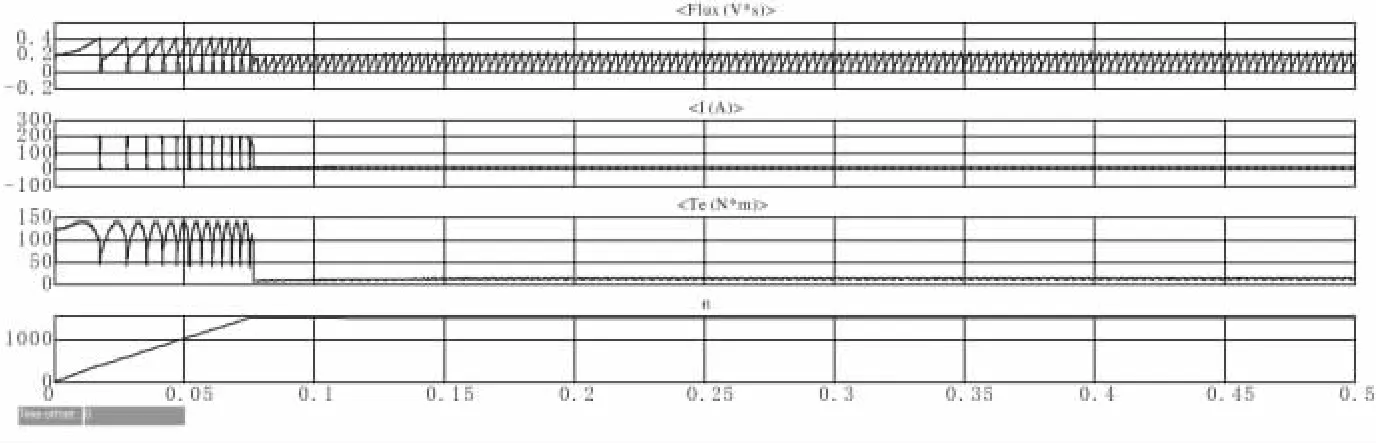
图5 设定转速为1 500r/min控制仿真波形
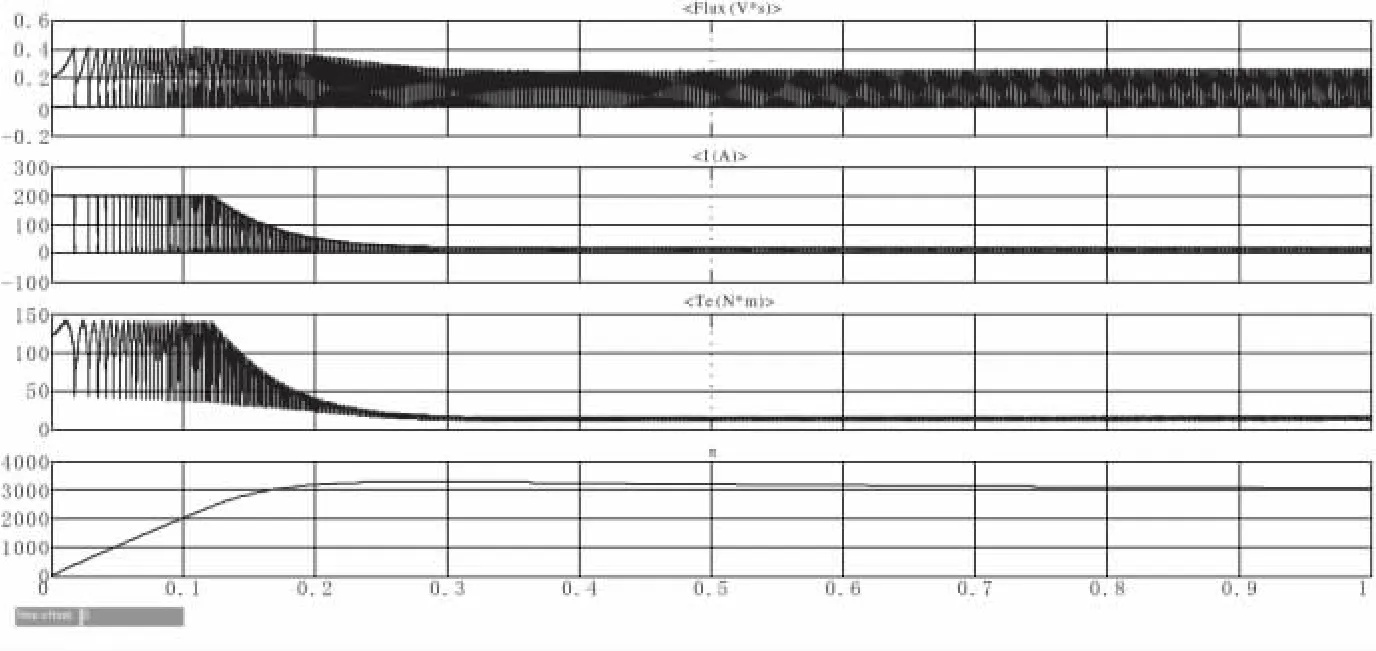
图6 设定转速为3 000r/min控制仿真波形
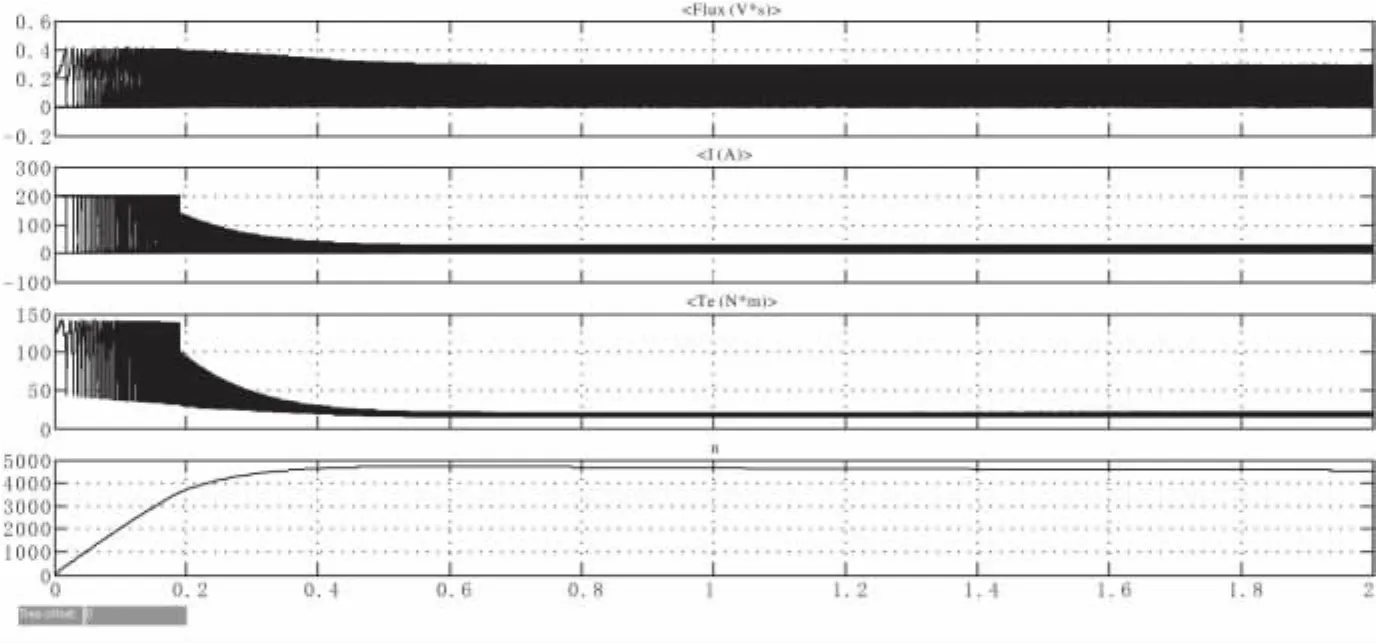
图7 设定转速为4 500r/min控制仿真波形

图8 设定转速为6 500r/min控制仿真波形
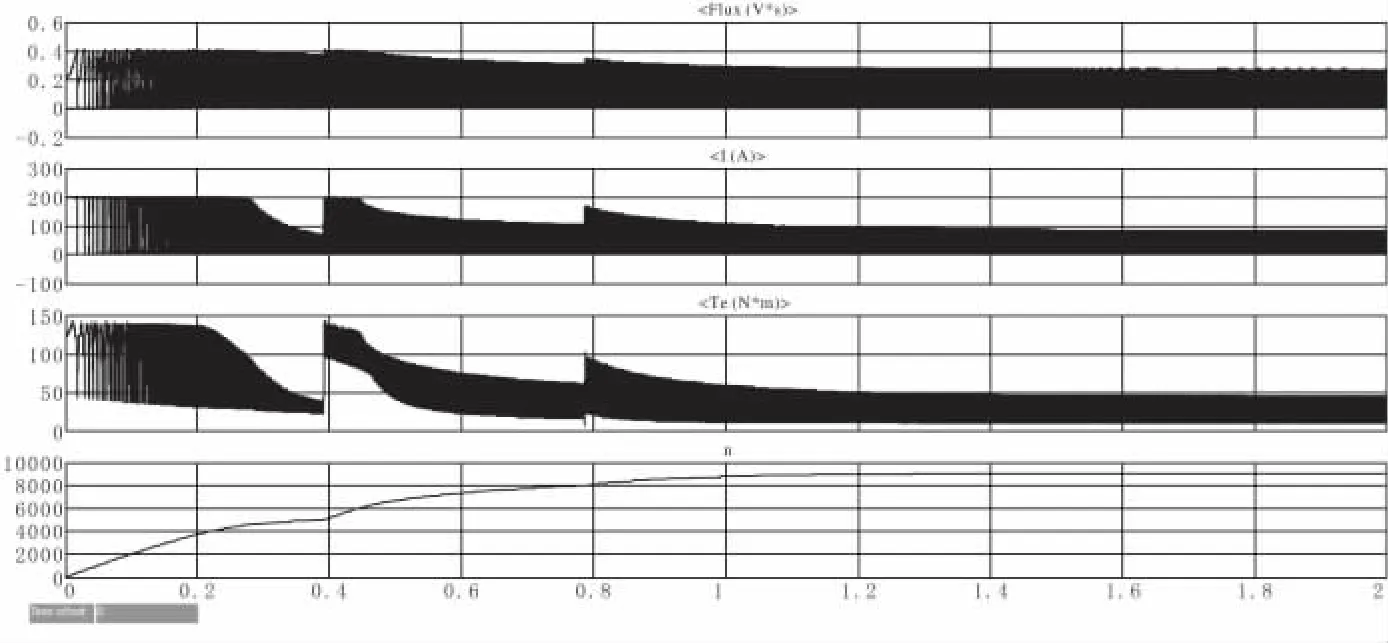
图9 设定转速为9 000r/min控制仿真波形
从仿真波形可以看出,该仿真模型能够对转速进行较好的调节,最终将转速稳定在设定转速。
5 结论
从仿真结果可以看到,该调速系统能够在0~10 000r/min的转速范围内进行平滑调节,与预期的结果相符,说明该模型设计合理。
[1] 詹琼华.开关磁阻电动机[M].武汉:华中理工大学出版社,1992.
[2] 吴红星.开关磁阻电机系统理论与控制技术[M].北京:中国电力出版社,2010:110-120.
[3] 曹伟伟.开关磁阻电机宽范围调速系统研究[D].杭州:浙江大学图书馆,2006:1-70.
[4] 王 磊.开关磁阻电动机调速性能研究[D].西安:西安交通大学图书馆,2011:1-35.
[责任编校:张岩芳]
Variable Frequency Speed Control of the Switched Reluctance Motor
HE Ya-hui,WEI Zhong-chao
(College of Electrical and Electronic Engin.of Huazhong Univ.of Science and Tech.,Wuhan 430074,China)
The switched reluctance motor drive has two control methods:CCC and APC.By combining the two control strategies,a simulation model was built under the environment of Matlab/Simulink.The model should adjust the speed of switched reluctance motors smoothly in the wide speed range.The result shows that this system is reliable and the drive system finally reaches the target requirements.
Switched Reluctance Motor large speed adjusting range;CCC;APC
TM3
A
1003-4684(2014)01-0045-04
2013-11-28
何雅慧(1991-),女,湖北天门人,华中科技大学硕士研究生,研究方向为电机与电器