一种机械式在线平衡头的设计与实验研究
2014-09-07顾超华罗迪威张加庆
顾超华,曾 胜,罗迪威,张加庆
(浙江大学 玉泉化工机械研究所,杭州 310027)
大型旋转机械,例如电厂里的透平压缩机,粉碎机等,经常会由不平衡质量造成的过大的振动。振动过大就要停机处理,这就会导致经济效益的损失或者生产效率的降低。因此有必要将这些设备的振动限制在一个较低的范围之内。为了满足这个要求,必须在生产、设计、运行、维护等环节提高要求。但是尽管这些要求能够达到,一些机械由于零件变形,材料的磨损,叶轮表面粘性物质沉积所造成的额外振动仍是不可避免的。现场动平衡通常被用于解决此类问题,但是对于大型机械由停工所造成的损失仍然十分昂贵,理想的解决方案是应用无须停机的在线动平衡方法。
在线动平衡系统包括两个主要部分,第一部分为平衡激励源,也称为平衡头,平衡头安装在被平衡转子上;另一部分是控制单元,由传感器及相关电路,驱动器,微机与相关软件及平衡算法组成。目前的技术水平而言,控制单元部分不存在困难,困难在于平衡头。人们期望一种结构简单,运行稳定,加工便宜的平衡头。
目前,有三种主流的平衡头:电机驱动式机械平衡头[1-2]、液体喷射式平衡头[3-4]和电磁式平衡头[5~9]。第一种平衡头中两个装在两个丝杆上的平衡块,分别由各自的电机驱动,用滑环来连接电机和控制单元。通过电机移动校正块,就能够得到合适方位的校正质量。由于这种平衡头结构复杂,并且有许多的摩擦部件,所以这种平衡头不适用于高转速情况。第二种平衡头具有四个独立的扇形腔和四个液体喷嘴。每一个喷嘴对应一个腔体,通过喷射合适量的液体到指定的腔体,就能得到需要的校正质量。这种平衡头能够工作在非常高的平衡转速下,但是所用的液体限制了工作温度。第三种电磁平衡头有2到3个圆盘,每个圆盘上都有一个校正质量。由定子上的线圈所产生的非接触式电磁力驱动,圆盘能够进行周向运动,从而产生一个校正质量。由于圆盘在高速情况下将产生膨胀,容易引起失控,因此这种平衡头也不适用于高转速情况。Du等[10]设计了一种用正弦波电压激励压电材料,使其产生弯曲蠕动来驱动平衡盘,并产生不平衡校正量的新型平衡头,从理论上分析了方案的可行性,并用实验装置进行了验证。这种平衡头尚处在初始研究阶段。
研究一种新型机械式平衡头,目的在于得到一种能够适应高转速,高工作温度的平衡执行器。论文介绍了平衡头的工作原理,分析了其工作过程和控制方案,并给出了基于该平衡头的实验结果。
1 机械式平衡头原理
机械平衡头由9片铝制的薄圆片组成。主要元件如图1所示。图1(a)是钢球导向板,图1(b)是分隔板,图1(c)是端面板。4块钢珠导向板和3块分隔板一一间隔,周向相差90°的排列在一起,他们与两块端面板一起组成了4个独立的腔体。图2显示了9块版的组装方式。在钢珠导向板中心有一个偏心的圆孔。一块钢珠导向板和其两块相临的分隔板,以及后面将要介绍的喂料装置组成了一个偏心的环形空间。当由这些盘所组成的平衡头旋转起来后,落入到偏心环形空间的钢球将在离心力的作用下滚落到相应的腔体中。平衡头中共有4个互成直角的腔体,每一个都与一个独立偏心环形空间相连。当钢球落入到不同的腔体就会产生平衡校正质量。为了实现此目的,还需要另一个重要的组件,即喂料装置,如图3所示。喂料装置的一端固定于定子上,另一端伸入到平衡头当中。喂料装置中有4个螺线形的小球输送通道,在重力的作用下,钢球能够被从定子传送到环形圈,然后落入腔体。图3给出了小球从外部落入环形空间的过程。
平衡头与喂料装置之间的间隙非常小,仅有0.5 mm,而小球直径为2.5 mm,因此小球不可能被夹住,这已经被在3 700 /min下的实验所验证。在每个腔体中都有一个永磁铁,因此能够防止落入腔体的刚球前后滚动和停车时的滚出。实际上小球导向板的形状设计已经避免了这种情况。
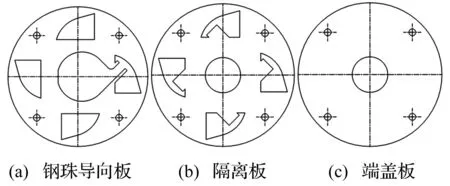
图1 机械式平衡头的主要部件
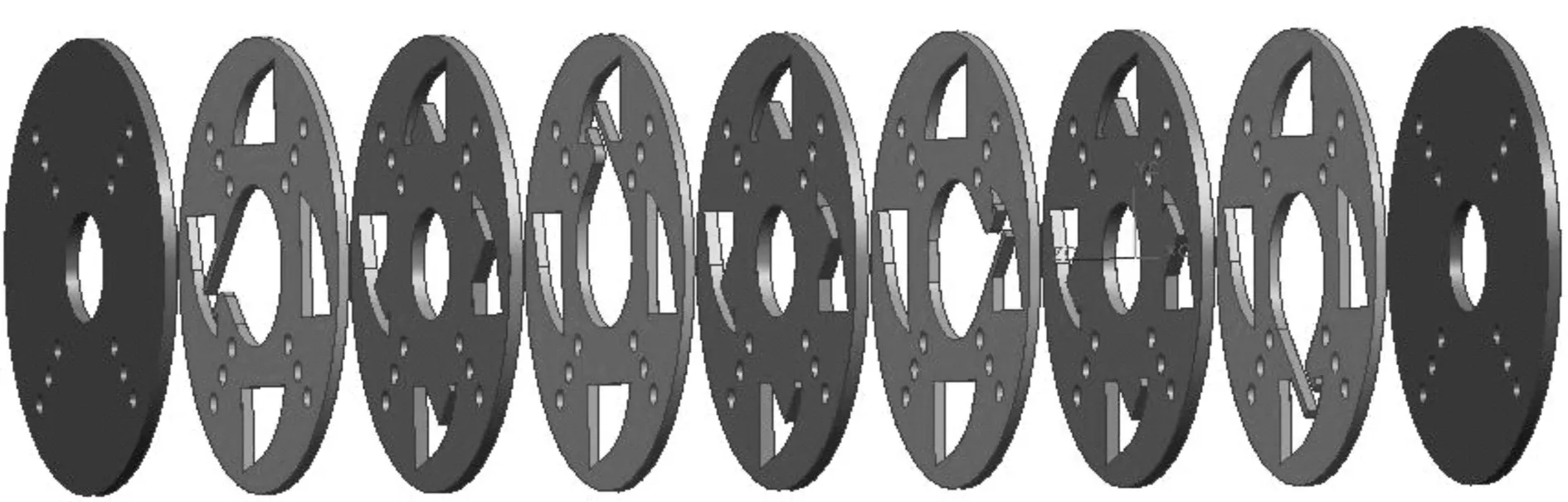
图2 纯机械式平衡头的组装
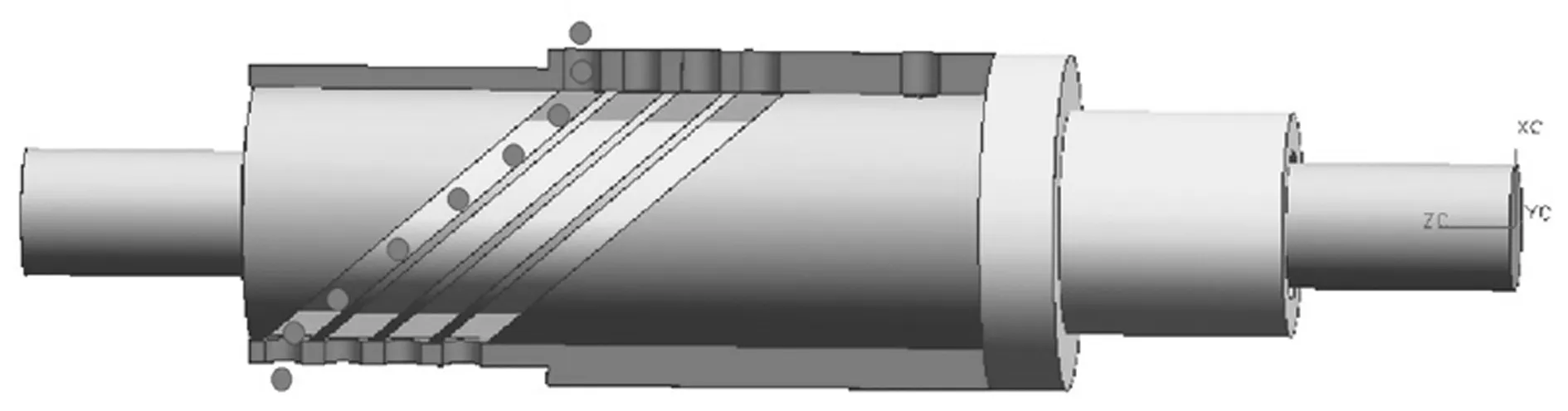
图3 喂料器
(a) (b) (c)
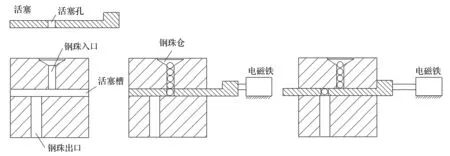
为了使系统能够自动运转,设计一种4通道自动投料装置,其结构如图4所示。图4(a)是投料器的活塞和十字块结构,活塞在电磁铁的驱动下被推入投料器,电磁铁由电脑控制。图4(b)显示了投料准备状态,一粒钢珠恰好处在活塞孔中准备投下。图4(c)显示了投料器的投料状态,一粒钢珠正在活塞的带动下由料仓移动到投料口。系统共有4个独立的相同的机构组成了投料器。投料器与喂料器之间由4个中空的塑料管连接。
钢珠的传送机构可总结如下:料仓->投料器->塑料管->喂料器->偏心环形腔->内腔 .目前钢球传送驱动力是重力。当重力不起作用时,可以使用压缩空气来驱动钢珠通过通路。表1 给出了平衡头的几何尺寸。
平衡头的一个很重要的问题是校正质量的分辨率,直径为2.5mm的钢珠质量大约为0.0648g,所以分辨率大约为0.447g.cm。对比文献[6]中的1.275g.cm分辨率,该分辨率对于此平衡头是合适的。
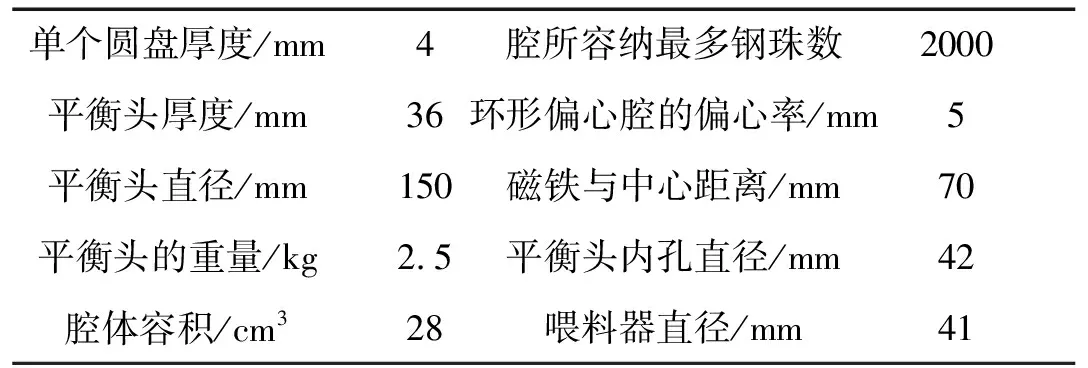
表1 平衡头尺寸汇总
2 平衡方法
平衡头的作用是安装在转子轴承系统中,在线平衡系统中的不平衡量。对于Q个盘,两个支承轴承,P个测量点和N个平衡头的转子系统,该系统的运动方程可写为:
(Bu+D(P×N)fN×1)ω2eiωt
(1)
式中M,C和K分别为等效质量,等效阻尼和等效刚度矩阵;X是在测量点的振动;B是初始不平衡的位置矩阵,当在这个位置上存在不平衡量时,其中的元素为1,否则为0;u是初始不平衡矢量;D是平衡头的位置矩阵,当这个位置上有平衡头时,其中的元素为1,否则为0;f是由平衡头的校正质量产生的校正矢量。
在平衡头里有四个正交腔室,对于第n个平衡头,使某一腔室的周向位置正对基准,则其余腔室相对于基准的位置分别为90°、180°和270°。每个腔室的校正质量是Unm(m=1,2,3,4),则第n个平衡头所产生的校正质量是:
令
Unx=Un1-Un3,Uny=Un2-Un4
则
(2)
在式(2)中,如果Unx>0 或Uny>0,这意味着,钢球分别落下到第一或第二腔室。否则,钢球分别落到相对的第三或第四腔室。总的校正矢量f表示为:
f=[(U1x+jU1y),…,(Unx+jUny),…,
(UNx+jUNy)]T
(3)
结合式(1)和式(3),平衡的的目的就是调整Unx和Uny(n=1,2,…,N),以尽快减小振动量X。
式(1)中,忽略钢珠投放进入平衡头时的瞬态响应,假定则初始不平衡矢量u和校正矢量f产生的振动分别为Xu和Xf,则合成振动X为:
X=Xu+Xf
(4)
校正矢量f由两部分组成,即初始校正矢量f0和可控校正矢量fc。引入影响系数矩阵AP×N,其中的元素apn表示第n个平衡头上的单位校正质量在p个测量点引起的振动。将初始校正矢量f0作为初始不平衡量,与初始不平衡矢量合并,有:
(5)
代入式(4):
(6)

利用机械平衡头,AP×N的识别是比传统的影响系数的平衡方法简单得多。识别步骤描述如下:在某一旋转速度下,先测量初始振动矢量X0,然后将一定数量的钢球投放到第一平衡头的确定腔室,以产生一个已知的校正质量U1,再次测量此时的振动矢量X1;此后,将相同数量的钢球投放到第二头的同一编号的腔室,产生校正质量U2,并测量振动矢量X2;按照相同的步骤执行到第N个平衡头,同时得到UN和XN。

则
A(P×N)×diag[U1,…,Un,…,UN]
(7)
因为校正质量是一步一步产生的,diag[U1,…,Un,…,UN]是一个满秩矩阵,其逆矩阵存在。式(6)中的影响系数矩阵A(P×N)可确定为:
diag[U1,…,Un,…,UN]-1
(8)
在式(6)中,初始可控校正矢量fc一般为零,并且初始振动矢量为X0,则
(9)
平衡整个系统的可控校正矢量fc是由式(10)确定。
X0=-AP×N×fc
(10)
在某些情况下,测点数P等于平衡头数目N,则可以直接求解方程(10)使振动X为零,有,
(11)
更一般的情况为P大于N,则振动矢量X不会为零。作为替代,可用残余振动振幅的平方和S来描述。
(12)
式中ξp是加权系数,表明测量点p的重要性。S可以通过求解方程组来最小化:
(13)
值得注意的是,上述平衡方法能够在不中断正常运行情况下,完成影响系数的识别和在线动平衡过程。对于柔性转子,其影响系数和平衡状态会随转子的转速变化而变化,所以当转子的转速变化时,平衡状态可能会偏离。在这种情况下重复上述过程,可以使转子系统恢复到新的平衡状态。过程重复多次后,不同转速下的影响系数可以拟合成影响系数曲线,存储后使用。
方程(11)或方程(13)仅仅确定最终校正矢量,使振动最小化。一般来说,人们常常期望转子系统停留在高值振动的时间越少越好。由于平衡头只能一步一步产生所需的校正质量,为了尽可能快地减少振动,可通过式(14)来确定的钢珠投放次序[11]。
(14)
式(14)中,具有最大值Qnm的第n个平衡头中的第m个腔室给予钢珠投放的优先权。平衡过程中,可根据已知钢珠投放数目、平衡头施放腔室和振动矢量,对式(8)中的影响系数进行修正。
3 实验装置
为了验证机械式平衡头的可行性,建立实验装置。一个长470 mm,直径17 mm的轴由两个普通轴承支撑,在轴上装有一个需要平衡的转盘,平衡头安装在转盘之上,因此该转子可以认为是一个Jeffcott转子。平衡头及转盘的质量为4.2 kg,转子由直流电机驱动。整个装置包括喂料装置固定在一个通用实验台上。电涡流传感器用来测量轴的振动,光电传感器用来测量键相位。所有的信号都传递到计算机中,在此进行数据的处理和记录。控制平台软件采用了Labview.7.1,转子轴承系统的临界转速约为2 852 r/min。图5为移除了安全罩和塑料管的装置实物图。
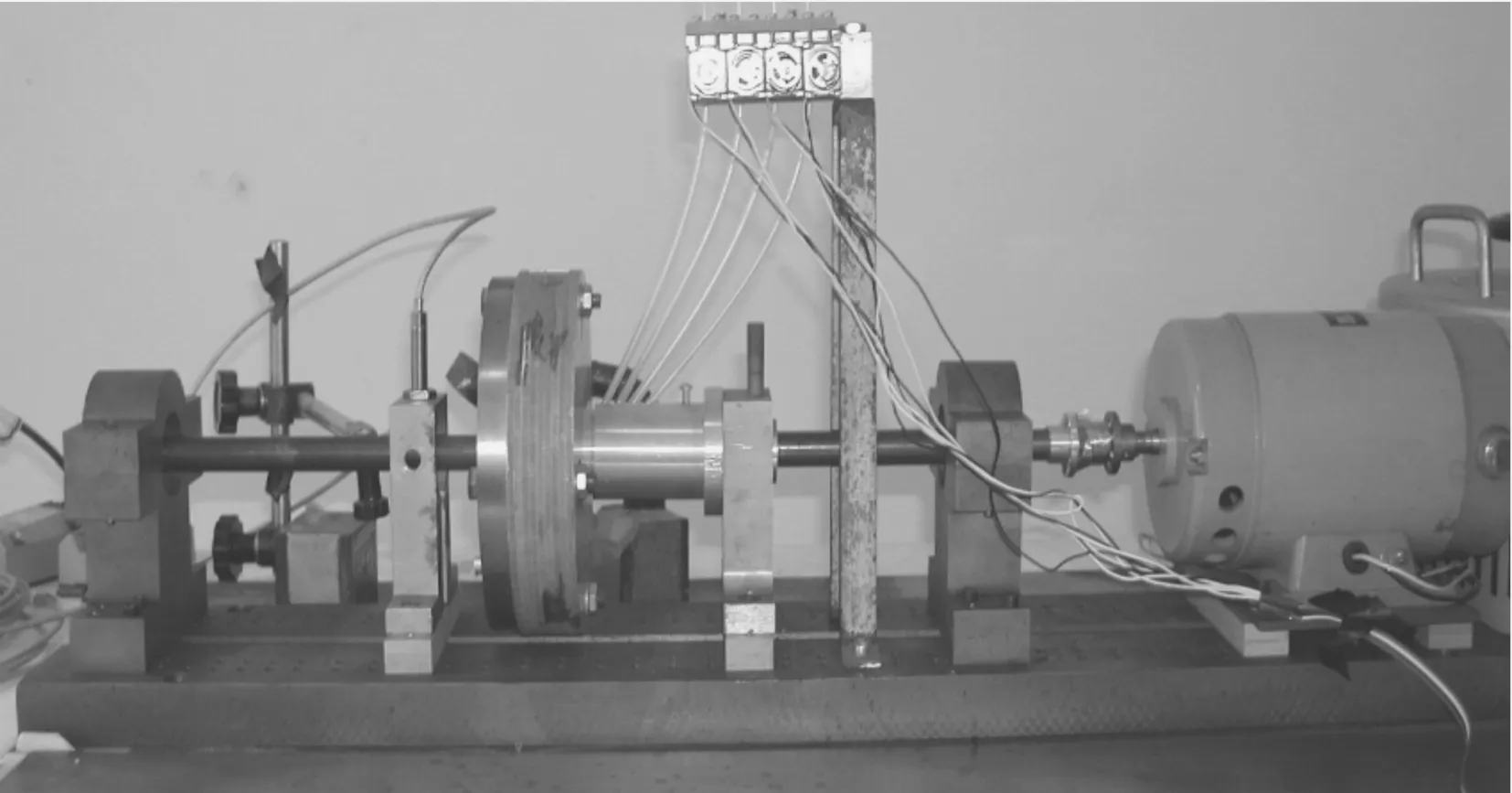
图5 实验装置
4 实 验
在上述实验装置中进行在线动平衡试验。计算机检测振动信号,计算出需要投放的钢珠数目及位置。这些数据显示在显示屏上,同时传递给电磁铁,控制钢珠的投放。由于有两个振动测量点,只有一个平衡头,所以用式(17)来计算校正矢量,并且用式(18)计算钢珠投放次序。
实验初始通过在线试重得到初始的影响系数,由影响系数和实时的振动信号可以计算出校正质量,由此可以得到所需投放的钢珠的数目和位置。然后通过电磁铁控制钢珠的投放。在平衡过程中影响因数需要逐步的矫正以达到精确值。图6和表2给出了实验结果。图6(a)是转子最初和最终的轨迹,图(b)是水平和垂直方向上的同步变化,平衡转速为2 650 r/min,可以看出轴的水平和垂直方向的同步振动分别从最初的100 mm、125 mm降到了15 mm、19 mm,降幅显著。细长轴在测点处的圆跳动度为20 mm,这不能通过平衡来消除。实验中,共在两个互成直角的腔体中投入了48颗钢珠,能够产生2.1g的校正量。在动平衡校正之前,转子不能够达到临界转速,这也是选择2 650 r/min作为平衡转速的原因。平衡之后转子能够平稳的通过临界转速。

图6 实验结果

表2 实验结果汇总
图7为振动调控实验,其实验转速为3 350 r/min,在临界转速之上。最初的水平和垂直同步振动分别为28 mm和29 mm。当在腔体中投入10颗钢珠后振动分别增至65 mm和56 mm。当反方向腔体另外投入10颗钢珠后振动分别降低至28 mm和32 mm。该实验的工作转速可达3 700 r/min,也是所用直流电机的最大转速。
5 结 论
研究了一种机械式在线平衡头,通过实验证明了其可行性,测试的最高转速为3 700 r/min。在这个转速范围内,钢珠能够平顺地投放到平衡头内的腔体中实现在线动平衡。显然这种平衡头可工作在更高的转速和高温环境中。尽管所研究的转子为柔性转子,但该平衡头同样可以被应用于刚性转子机械。例如磨床,在这种情况下,喂料装置可以通过两个轴承安装在平衡头的内孔中。
必须指出论文仅对机械平衡头进行了初步可行性研究和实验,许多问题,如腔体的形状如何设计最合适,已投入腔体的小球群的中心位置如何引起影响系数发生变化,小球在传输轨道中的运动模拟等,需要进行进一步研究。
致谢:本文由浙江省重大科技专项资助(2011C11064),在此表示感谢!
[1] Van De Vegte J.Continuous automatic balancing of rotating system [J].Journal of Mechanical Engineering Science,1964,6(3):264-269.
[2] Van De Vegte J,Lake R T.Balancing of rotating system during operation [J].Journal of Sound and Vibration,1978,57(2):225-235.
[3] Smalley A J,Baldwin R M,Schick W R.Spray automated balancing of rotors: concept and initial feasibility study [J].Journal of Engineering for Gas Turbines and Power,1989,111(4):659-665.
[4] 李燕,王维民,黄立权,等.基于蠕动泵的注排液式转子自动平衡实验研究[J].振动与冲击,2011,30(4):38-41.
LI Yan,WANG Wei-min,HUANG Li-quan,et al.A rotor auto-balance device with continuously injecting and draining liquid based on peristaltic pumps [J].Journal of Vibration and Shock,2011,30(4):38-41.
[5] 李晓冬,王立威,冀清发.径注式砂轮在线液体平衡装置的研究[J].兵工学报,2004,25(3):326-329.
LI Xiao-dong,WANG Li-wei,JI Qing-fa.A study on radial online liquid equilibrator for the grinding wheel [J].Acta Armamentarll,2004,25(3):326-329.
[6] Zeng S,Wang X X.The electromagnetic balancing regulator and the automatic balancing system [J].Journal of Sound and Vibration,1998,209(1):5-13.
[7] 熊四昌,金振峰,孙建辉.在线动平衡调节器的改进快速寻优策略[J].浙江大学学报(工学版),2008,42(8):1415-418.
XIONG Si-chang,JIN Zhen-feng,SUN Jian-hui.Improved fast optimization strategy for online balancing adjustor [J].Journal of Zhejiang University(Engineering Science),2008,42(8):1415-418.
[8] 王仁超,景敏卿,樊红卫,等.一种新型电磁平衡头的静态磁特性研究[J].机械与电子,2012,(7):10-13.
WANG Ren-chao,JING Min-qing,FAN Hong-wei,et al.Magnetostatic study on a new electromagnetic balancer [J].Machinery and Electronics,2012,(7):10-13.
[9] Moon J D,Kim B S,Lee S H.Development of the active balancing device for high-speed spindle system using influence coefficients [J].International Journal of Machine Tools and Manufacture,2006,46(9):978-987.
[10] Du Z,Mei X S,Xu M X.Modelling and analysis of a new piezoelectric dynamic balance regulator [J].Sensors(Switzerland),2012,12(11):14671-14691.
[11] Zeng S.Moving strategy of correction masses in an electromagnetic balancing regulator [J].Journal of Mechanical Engineering Science,2003,217(5):543-549.
