反应堆压力容器主螺栓螺母超声检测控制软件的设计与实现
2014-09-06,,,
, ,,
(1.中核核电运行管理有限公司,浙江 海盐 314300;2. 国核电站运行服务技术有限公司,上海 200233)
反应堆压力容器主螺栓螺母超声检测控制软件的设计与实现
李世伟1,柏勇2,孙茂荣2,张宝军2
(1.中核核电运行管理有限公司,浙江 海盐 314300;2. 国核电站运行服务技术有限公司,上海 200233)
0 引言
反应堆压力容器主螺栓螺母是反应堆压力容器本体和顶盖之间的连接紧固件,长期在高温高辐照和交变应力环境下工作,易于形成疲劳损伤,是反应堆压力容器中重要的受力易损部件,属ASME规范、RCCM规范要求的必检部件[1]。
对主螺栓的超声检测方法主要是以中心孔检测为主,辅以端面扫查。传统的手动检测方式存在重复精度不高、检测效率低和易漏检等缺点,而自动检测不仅能够克服手动法的缺点,具有可靠性高、灵敏度(信噪比)高和重复性好等优点外,也可以在很大程度上提高检测效率,对核电站高效高品质地及时发现隐患,确保部件的运行安全有重大意义[2],这也对承载及控制超声探头的自动系统提出了更高要求。因此,自主开发了一套反应堆压力容器主螺栓螺母超声检测控制软件系统,该控制系统不仅提高了检测时传动机构运动的稳定性,消除了由于径向跳动带来较大的误差,从而提高了检测精度及信噪比;而且解决了耦合剂的自动供给、排放及回收,满足了不同堆型核电站主螺栓螺母的全体积超声检测的要求。
由于该系统需对主螺栓螺母的多个重点部位实行严格的无损检测,并且涉及定位精度、水位控制、检测方式和参数设置等问题。因此,为了控制软件界面操作的简便性和简单性,宜采用Outlook风格显示。另外,考虑到机械装置控制部分的硬件驱动接口应具备通用性和稳定性,故最终确定采用VC6.0作为控制软件的开发平台。
1 系统逻辑结构设计
控制软件的逻辑结构主要包括界面显示、人机交互、视频显示、水位信号采集和电机闭环控制等。从程序逻辑的实现上包括中断模块、采集模块、电机驱动模块和系统状态监控等。其逻辑设计如图1所示。
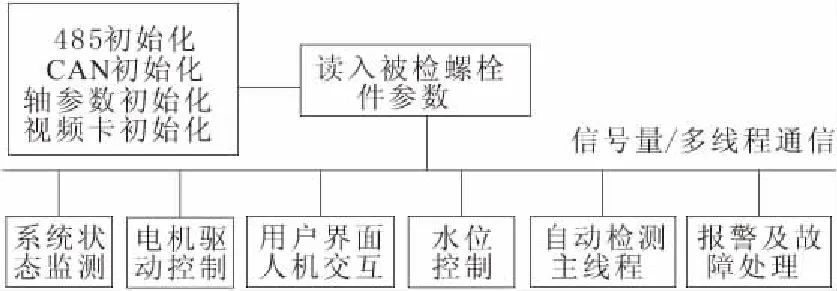
图1 系统逻辑设计
2 关键技术
2.1 运动控制
VC++是现在最为通用的开发工具之一,它提供了相当齐备的类库和友好的界面,为控制系统的开发提供了比较好的开发环境,提供了多种简便的开发技术。因此,借助VC++可以开发出功能强、速度快、应用广并且占用资源少的小型运动控制系统。
目前,在Windows环境下实现串行通信主要有2种方式[3],即WindowsAPI函数和MSComm控件串口通信编程。
Windows API是Windows应用程序编程接口的缩写,它由一系列的例程构成,应用程序通过调用这些例程来请求操作系统完成一些低级的服务。使用其编写串口程序具有很大的灵活性,配合Win32的重叠I/O操作和多线程设计,可以编写出高效灵活的通信程序。
MSComm控件是Microsoft公司提供的简化Windows环境下串行通信编程ActiveX控件,该控件通过串行端口传输和接收数据。VC为其提供了使用RS232进行数据通信的所有协议,同时提供了标准的事件处理函数、过程,软件开发人员可方便地通过属性和方法的设置进行串口通信。
控制系统选用的是Techno soft驱动控制模块,集成了运动控制和伺服放大功能。控制方式为闭环控制,运动速度在一定范围内连续可调,所采集的超声信号具有高信噪比及精确定位等特征。该模块提供RS232/Ethernet和CAN接口,一般使用RS232或Ethernet连接PC机和某一模块,而各轴驱动之间的连接由CAN网实现。如图2所示。
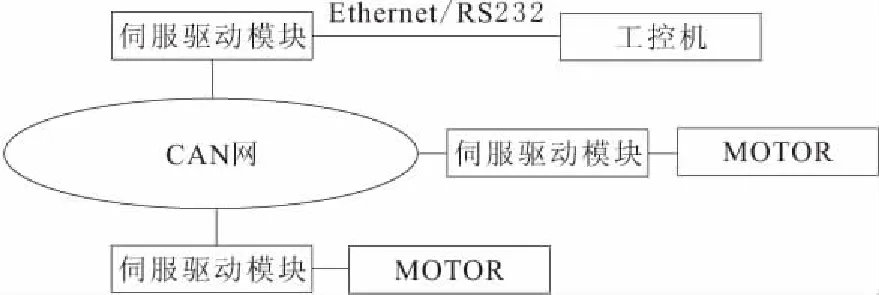
图2 运动控制系统结构
定位方式主要通过电机编码器、光电开关及主螺栓上端面周向指示,实现缺陷的轴向及周向精确定位。
2.2 水位控制
在主螺栓中心孔超声检测过程中,由于检测工艺的要求,需要保证水位始终高于检测探头一定高度。在实际检测过程中,探头上下往复运动的速度可达150mm/s,需要水位高度快速跟随探头高度的变化。而且,螺栓中心孔内直径约为26 mm,由于探头需要保证贴合内壁,一般为24~25 mm,注入的去离子水位于中心孔和探头之间的窄小缝隙中,根据检测要求,水位不能低于探头,否则无法保证超声检测信号的有效性。这种情况下,探头的上下往复动作将带来水位的大幅变化,如探头的上升动作会使得水位急剧下降脱离探头高度,如探头向下运动,将导致水位急剧升高或溢出螺栓,造成现场污染。因此,必须对供水回路施加控制,使水位高度能够始终跟踪探头高度,保持在一定范围内,即便在探头高速进行上下往复动作时仍能够保持快速跟随特性。根据以上特点和要求,设计了水位控制系统,其结构如图3所示。
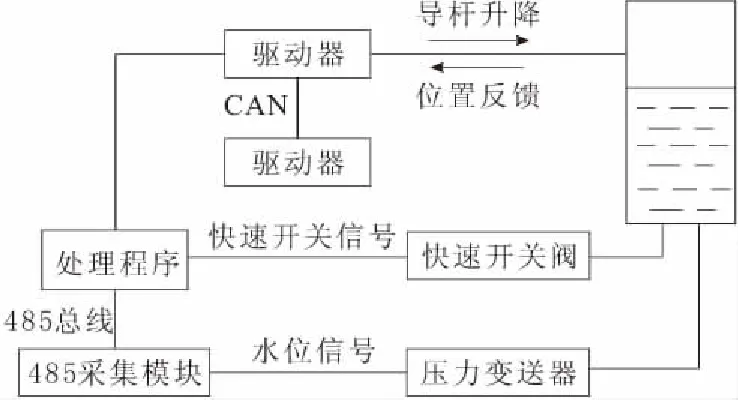
图3 水位控制系统
其中,处理程序根据导杆位置的反馈信息,确定水位控制的目标范围。同时根据当前水位的水高,经相应的程序处理,输出相应的快速开关信号。控制算法采用模糊控制[4],模糊输入量有2个,分别为当前水位偏差和当前水位偏差的变化,输出为快速开关阀的通断占空比。其语言描述举例为:
a.IF 偏差 is 正大 AND偏差变化 is 正大 THEN 泄水阀开关频率 is 正大。
b.IF 偏差 is 正大 AND偏差变化 is 正小 THEN 泄水阀开关频率 is 正大。
c.IF 偏差 is 正大 AND偏差变化 is 零 THEN 泄水阀开关频率 is 正小。
其他规则以此类推。
3 软件功能的设计和实现
根据主螺栓不同检测部位和检测方法的要求,该控制软件主要功能模块如图4所示。

图4 主螺栓超声检测软件功能模块
3.1 系统准备模块
系统准备模块为用户提供了被检螺栓类型选择功能,包含了AP1000、CPR1000和C23种堆型。选好指定的堆型后,在其右侧对应属性区域中将会显示系统默认的初始参数,若有所偏差可通过手工方式修改,点击应用按钮后系统会自动更新数据库,这主要由FirstView类来实现。
3.2 端面扫查模块
端面扫描功能模块主要为主螺栓上部端面检测用,控制界面设计为手动模式、自动模式。通常系统默认初始为手动模式。通过输入相应的参数值,可控制转台电机的转动和光杆电机的升降运动。另外,操作区域的“端面归零”功能用于径向电机运动至由光电开关设定好的零位后停止,这将作为检测的起始位置。“联动”功能将控制转台和径向电机,按照设定好参数和运动方向同时运动。
3.3 主螺栓超声检测模块
主螺栓超声检测模块界面设计为点动模式和自动模式2种操作方式,包括导杆归零、启动水位跟踪、水位控制退出和切换人工4个功能。
处理程序根据导杆位置和传感器的反馈信息确定水位控制的目标范围。同时水位显示部分将根据当前水位的高度,经相应的程序处理,输出相应的实时水位高度和导杆位置情况二维柱体图。控制算法采用模糊控制,模糊输入量有2个,分别为当前水位偏差和当前水位偏差的变化,输出为快速开关阀的通断占空比。程序会控制导杆运动至光电开关设定的零位处停止,并将此点作为检测的起始位置。
3.4 运行视频模块
运行视频模块设计为由机械装置上的监控摄像头捕捉画面,通过本控制软件显示。这样可以在装置检测时实时监控运动的情况,以保证检测过程的正确性。摄像头的监控位置可根据现场实际调整摆放,并可在需要时增加数量以观察多处感兴趣的位置。
另外,该模块还用于在端面扫查前对螺栓端面零点位置的确定,通过右侧对转台的控制按钮的点击和视频目视监测,将突出的指示块尖顶对准端面零点位置,这将作为端面扫查的起始坐标。对导杆和径向电机的位置调整,也可通过相应按钮和视频目视监控来逐步精确到位。
3.5 系统调试模块
系统调试模块主要用于装置的调试,比如相应硬件设备通电状态的显示以表明设定点输出正常;另外也可以检测探头是否能正确回到指定零位,测试程序是否正常、运动是否稳定。
4 结束语
目前,该系统的基本功能、控制应用可靠性、安全性、性能和技术指标完全满足核电站工程应用现场的实际检测要求,消除了主螺栓可能存在的安全隐患,确保其状态满足运行要求,从而有效减少机组故障和核事故的发生机率。但由于控制系统的开发是在缺乏相关资料,国内基本没有相关产品参照的情况下进行的,同时开发周期短、时间紧,并且为第一代产品,其不完善的地方在所难免,后续将进一步地改进和完善。
[1] 林诚格. 非能动安全先进核电厂AP1000[M]. 北京:原子能出版社,2008.
[2] 代利军. 超声波检测主螺栓裂纹波与假信号识别[J]. 无损探伤,2004,28(4):36-37.
[3] 刘锐宁,宁 坤. Visual C++从入门到精通[M]. 北京:清华大学出版社,2009.
[4] 李士勇. 模糊控制、神经控制和智能控制论[M]. 哈尔滨: 哈尔滨工业大学出版社,1996.
Design and Implementation of Ultrasonic Inspection ControlSoftware for Reactor Pressure Vessel Primary Bolt and Nut
LIShiwei1,BAIYong2,SUNMaorong2,ZHANGBaojun2
(1. CNNC Nuclear Power Operation Management Co.,Ltd.,Haiyan 314300, China;2.State Nuclear Power Plant Service Company, Shanghai 200233, China)
核电站反应堆压力容器主螺栓螺母是重要的受力易损部件,必须对其进行定期的缺陷检测。介绍了自主研发的主螺栓螺母超声检测控制软件的构成,主要从软件的系统逻辑结构、水位控制实施方案,各模块的功能设计与实现等几个方面进行了阐述,并对控制算法进行了简单描述。事实证明,该控制软件极大方便了对反应堆压力容器主螺栓螺母的役前和在役超声检测工作。
核电站;主螺栓螺母;超声检测;水位控制
The primary bolt and nut of reactor pressure vessel is an important component which is easy to be damaged and need to be inspected periodically. The sketch of control software for ultrasonic inspection is introduced. This article from the software system logic structure, the scheme of leveling control, function and implementation of each module and other aspects are described, and control algorithm is also designed.It proves that the control software greatly facilitates the ultrasonic inspection work for the primary bolt and nut during pre-service and in-service inspection.
nuclear power plant; primary bolt;ultrasonic inspection;leveling control
2014-05-09
TP273.5
A
1001-2257(2014)09-0071-03
李世伟(1973-),男,福建莆田人,高级工程师,工学学士,研究方向为机械制造与工艺;柏勇(1983-),男,安徽六安人,助理工程师,工学硕士,研究方向为热能工程。
