被动电磁阻尼器对斜拉索振动控制研究
2014-09-05汪志昊陈政清
汪志昊,陈政清
(1.华北水利水电大学 土木与交通学院,郑州 450011;2.湖南大学 风工程试验研究中心,长沙 410082)
斜拉桥拉索极易发生大幅的风振、风雨振和参数振动。拉索减振主要有气动措施、结构措施与机械阻尼措施三大类。相对气动与结构措施,机械阻尼措施属于一种更为广谱的拉索减振措施,从而在实际工程中得到了最广泛的应用。根据阻尼材料的不同,目前常用的拉索减振阻尼器主要有[1]:高阻尼橡胶减振器、粘性剪切型阻尼器、油阻尼器[2~4]、磁流变(MR)阻尼器[5~7]及磁力阻尼器[8]。内置高阻尼橡胶阻尼器对拉索阻尼比的提高极为有限;黏性剪切型阻尼器存在阻尼特性易受温度的影响及尺寸较大等缺点;外置式油阻尼器或MR 阻尼器存在耐久性问题-漏液,而且MR阻尼器还需要外界提供稳定的电源供给;中野龍児等[8]研发的磁力阻尼器目前仅试验性地用于日本天建寺桥,其主要原理是利用磁石与吸着板的吸着或分离实现拉索不同振型能量之间的转化。
电磁阻尼器作为土木工程领域中的一种新型阻尼器,一般来说又分为两种,一是基于发电机电磁阻尼原理,二是电涡流阻尼。Rogelio等[9]提出了一种有望用于土木工程结构的电磁阻尼器,见图1所示。其实质上是一种直线发电机,通过电路耗散结构的振动能量。研究表明:电磁阻尼器和理想的线性黏滞阻尼器具有相同的力-速度关系,只是存在由电路反应时间导致的微小延迟;对于相同的黏滞阻尼系数,二者尺寸基本接近。Sodano等[10]总结了基于电涡流阻尼的各种减振装置,及其在航天结构与汽车减振、刹车,旋转机构的振动控制以及结构振动的控制领域中的应用,典型的电涡流阻尼器构造[11]见图2所示。可见,电涡流阻尼与发电机电磁阻尼的主要区别在于耗能导体是否闭合。
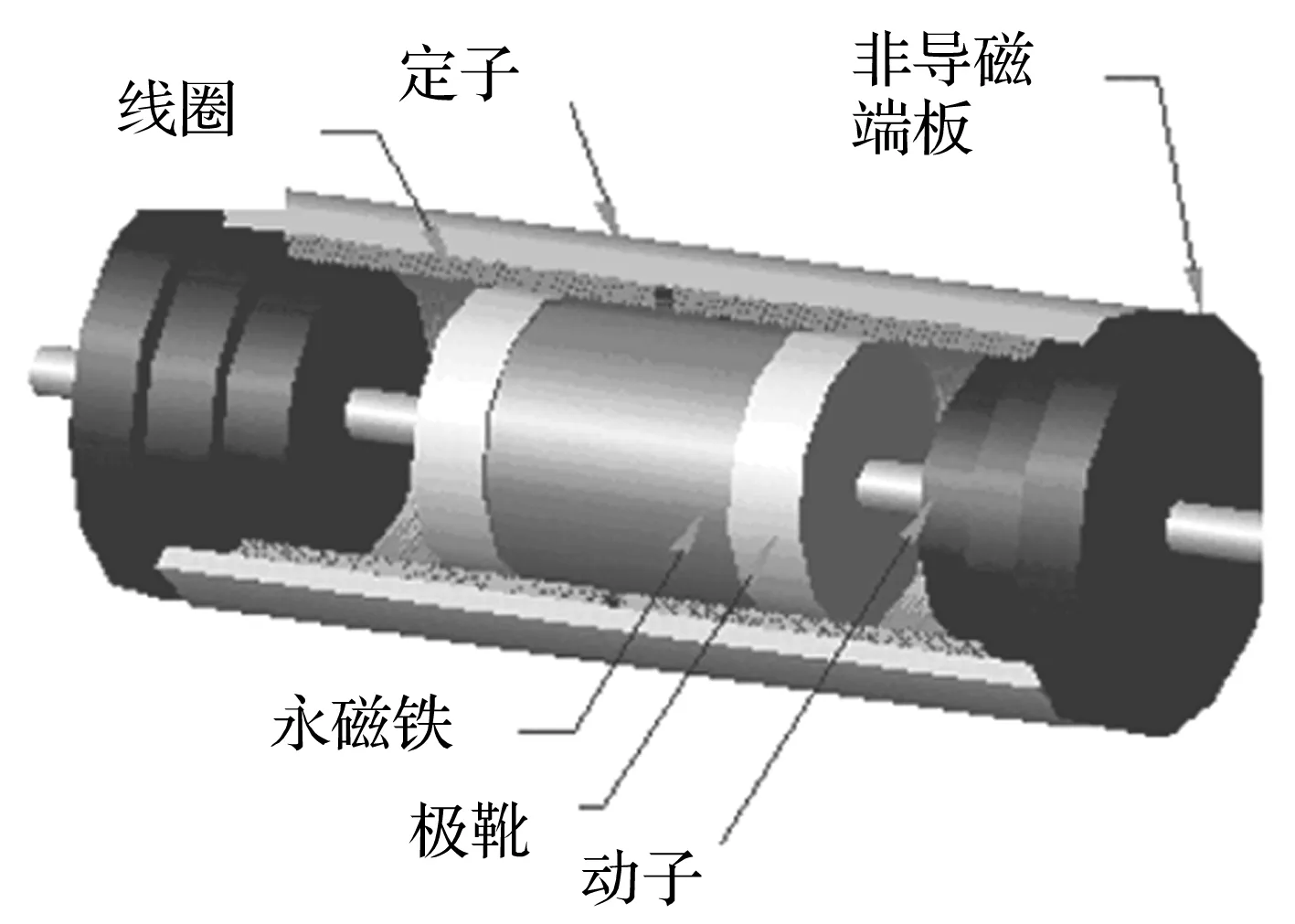
图1 电磁阻尼器

图2 电涡流阻尼器
虽然现有阻尼器减振措施在一定程度上解决了既有拉索振动问题,但也依然存在以下问题:①阻尼器均要求刚性支撑,当安装位置较高时,刚度难以得到保证,从而影响减振效果;②现有常规阻尼器内置硅油或磁流变液体,长期工作存在漏油失效破坏的可能;③耐久性较高的直线式电磁阻尼器易受行程限制,且能耗功率较低[12]。因此,本文尝试开展基于旋转式电磁阻尼器的拉索减振技术研究。
1 电磁阻尼器工作原理与性能测试
1.1 工作原理
旋转式电磁阻尼器选用上海某电机公司生产的CFX-03型直流测速发电机。出厂主要性能参数有:电动势常数ke为0.06V/(r·min-1);静态电枢内阻Ra为6.4Ω;重3.7 kg;最大设计转速3 000 r/min。直流测速发电机的电枢电动势Ea可表示为
Ea=ken
(1)
式中:n表示电机转子转速。忽略电枢接触压降,负载为RL时的输出电压为
(2)


(3)
因此,发电机在一个振动周期2π/ω内耗散的总能量为
(4)
式中:ceq表示发电机电磁阻尼对应的等效黏滞阻尼系数,其大小为
(5)
可见,发电机电磁阻尼的本质就是线性黏滞阻尼。对特定的发电机而言,由于ke与Ra是常数,通过改变η与RL就可调整电磁阻尼系数的大小。本文所有测试中RL均为零,即电源短路,此时对应最大阻尼系数。
1.2 性能测试
旋转式电磁阻尼器性能测试系统示意见图3所示,相应试验照片见图4所示。其中,力传感器1测试的是系统弹性力,力传感器2测试的是阻尼器总出力,二者之差即为阻尼器出力。试验采用变频器调节变频电机的转速,变频电机转轴带动偏心轮转动,经过链条上的弹簧预拉力,使得链条往复直线正弦运动,然后带动测速电机的转子正反方向的转动。试验链条直线运动振幅10 mm,链轮有效转动半径为2.3 cm。
图5给出了激振频率3 Hz时的阻尼器出力时程,图6给出了各频率激振下的阻尼器出力与位移的变化关系。从图6可以看出,电磁阻尼器出力与位移呈椭圆的关系,当激振频率较高时力与位移还呈现出负刚度关系。所谓负刚度,即控制装置的出力与位移存在一个负斜率。理想的黏滞阻尼器在较低的振动频率(3Hz以内)工作时,一般认为其具有零刚度。正刚度的典型代表是黏弹性阻尼器,而内刚度为负的被动阻尼器还较为少见。在结构振动主动与半主动控制的研究过程中,研究者发现了主动控制力的负刚度现象[13~15],而且证实负刚度效应对结构减振具有显著的增强作用。

图3 旋转式电磁阻尼器性能测试系统示意图
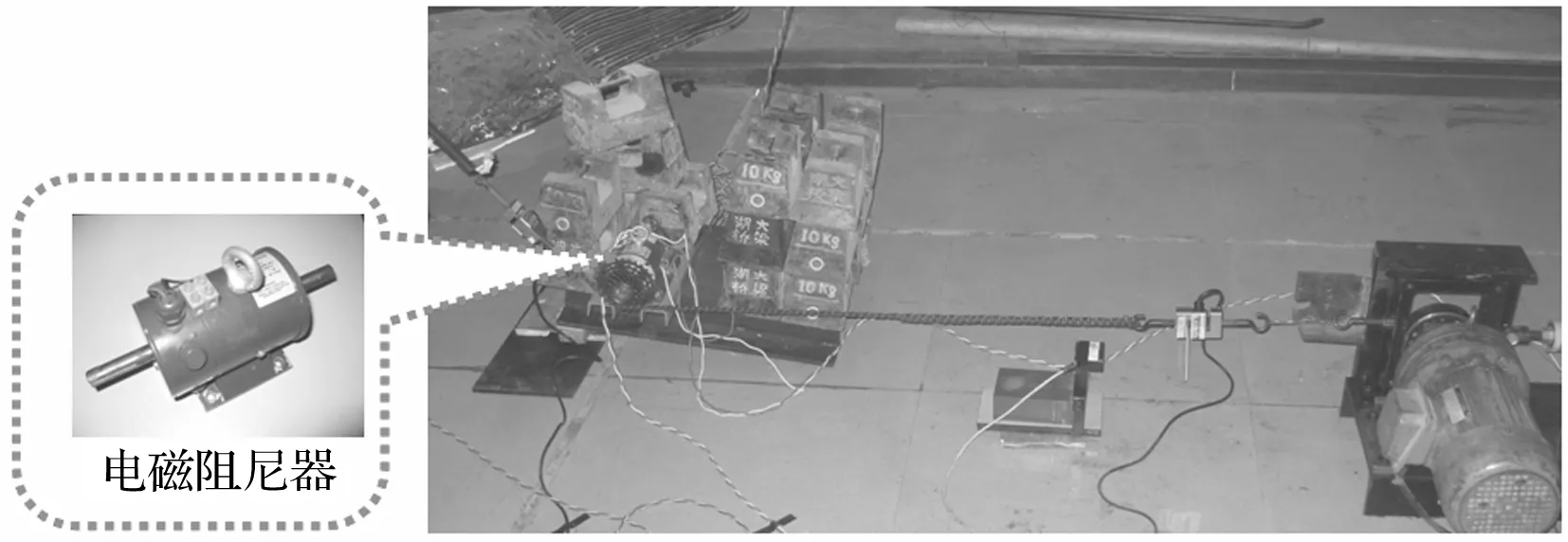
图4 旋转式电磁阻尼器性能测试装置照片
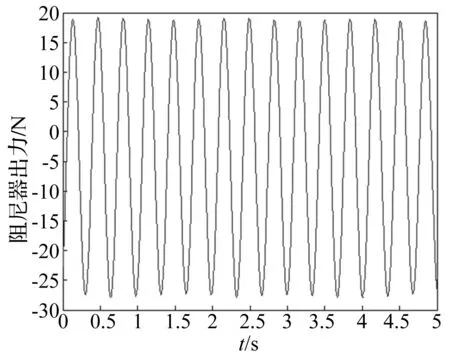
图5 阻尼器出力时程曲线(3 Hz)

图6 阻尼器出力与位移关系(由内到外依次为1 Hz、2 Hz、3 Hz、4 Hz与5 Hz)
忽略摩擦的影响,电磁阻尼器出力可以假定为
(6)


表1 电磁阻尼器的等效刚度与阻尼系数
2 阻尼器-斜拉索减振试验平台
2.1 试验装置
模型斜拉索与试验布置见图7所示,试验拉索取图中滑动支座以上部分进行减振试验,有效长度L为21.6 m。该索受力构件采用7φ5钢绞线,每隔16 cm均匀安装圆筒钢块作为配重(索的配重与自重共计11.01 kg/m),初始张力设为20.5 kN,对应的无量纲垂度参数λ2为16.25(实际桥梁拉索λ2一般小于10[16])。电磁阻尼器采用链条传动,通过一个施加预拉力的钢丝绳与拉索相连,当拉索在面内振动时,链条带动耦连在电磁阻尼器转子上的链轮正反方向转动。现场试验照片见图8所示,试验过程中主要测试的动态信号有:阻尼器安装位置处的拉索面内位移;固定阻尼器的钢丝绳张力;拉索观测点(离滑动支座1/8L处)的加速度。

图7 拉索振动控制试验的布置示意图

图8 采用旋转式电磁阻尼器的拉索减振试验照片
2.2 试验步骤
在减振试验前,首先测试斜拉索的固有动力特性,即拉索前五阶模态的固有频率与阻尼。为考察阻尼器安装位置、传动比对拉索减振效果的影响,减振效果试验中电磁阻尼器位置变化3次,分别安装在0.48 m(1号位置)、1.25 m(2号位置)与2.16 m(3号位置)处;传动比变化2次,链轮有效转动半径分别为2.3 cm(记为链轮1)、3.3 cm(记为链轮2),共计6组正交试验。试验中采用人工激振,先设法使拉索发生目标振型的大幅简谐振动,然后瞬间去除激励,让拉索做自由衰减振动,同时进行信号采集。此外,为了提高激振信号的质量,激振点变化了两次,其中第1、2阶模态距离滑动支座1/4L位置,第3~5阶模态1/10L位置。
3 减振试验结果与分析
3.1 斜拉索的动力特性
通过自由振动测试得到了斜拉索前五阶模态的固有频率与阻尼比,结果见表2所示。从表2可以看出,模型拉索的基频与100 m级实桥拉索较为接近,且拉索第2到第5阶的固有阻尼都很低,与实桥拉索的阻尼也基本相当。
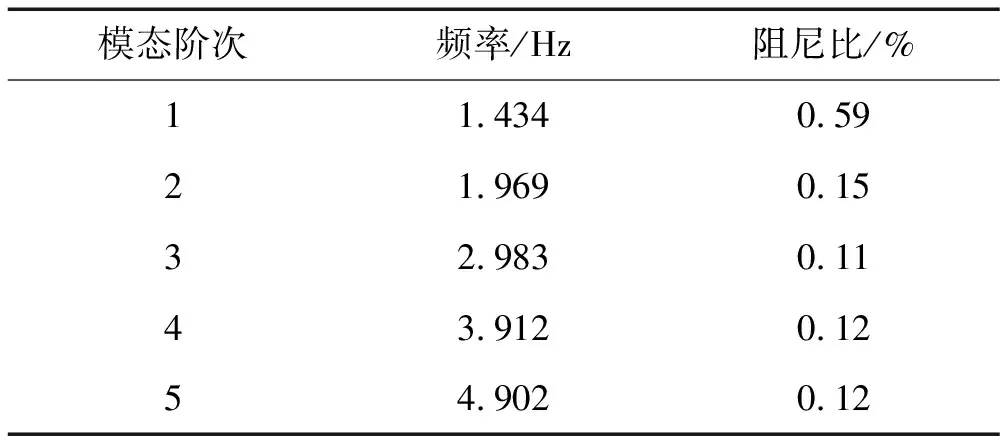
表2 斜拉索的模态频率与固有阻尼比
3.2 阻尼器减振效果
表3~5列出了拉索安装阻尼器后前五阶模态阻尼比及扣除结构固有阻尼后的附加阻尼比,可见:①总的来看,对拉索同一阶振动模态,链轮半径越小,阻尼器安装位置越高,电磁阻尼引起的拉索附加模态阻尼比均较大;②对于相同的链轮半径,当阻尼器安装在较低的1与2号位置时,拉索前五阶模态的附加阻尼比整体呈持续增大趋势;③对于相同的链轮半径,当阻尼器安装在较高的3号位置时,拉索前五阶模态的附加阻尼比先增大,后减小,在第三或四阶模态达到最大值;④对应电机3号位置、链轮1时的拉索前五阶模态的附加阻尼比达到最大,大小分别为0.28%、1.71%、3.82%、3.27%与2.11%,与阻尼器安装高度比的比值分别为0.03、0.17、0.38、0.33与0.21。
3.3 阻尼器出力特性
基于最小二乘原理识别得到的各工况对应的电磁阻尼器等效阻尼系数已列在表3~5中,等效刚度系数识别结果见表6所示。计算得到链轮1与链轮2短路对应的阻尼系数分别为96.96 Nsm-1与47.10 Nsm-1,比较计算值与表3~5中的试验值发现理论计算值整体偏小,但与高阶模态的试验识别值较为接近。此外,从表6结果来看,对于所有的工况,电磁阻尼器系统几乎均从拉索的第二阶模态开始体现出负刚度效应,且高阶模态的负刚度效应更加显著,这与前文的电磁阻尼器单体试验结果也是相互吻合的。

表3 电磁阻尼器1号安装位置时斜拉索的减振效果

表4 电磁阻尼器2号安装位置时斜拉索的减振效果

表5 电磁阻尼器3号安装位置时斜拉索的减振效果

表6 各试验工况电磁阻尼器的等效刚度系数
4 结 论
本文成功地采用旋转式电磁阻尼器进行了模型斜拉索减振控制的室内试验研究,为拉索减振提供了一种新的技术。旋转式电磁阻尼器拉索减振系统的主要优点有:①相对现有拉索减振技术采用的液体阻尼器,电磁阻尼器全部由金属材料构成,不存在漏油失效等耐久性问题,且还可以通过改变负载的大小,较容易地实现阻尼器等效阻尼系数的调节;②由于电磁阻尼器与拉索之间采用柔性索连接,可以安装在拉索的相对较高位置处,从而可以取得更好的减振效果;③电磁阻尼器-拉索减振系统同时体现出黏滞阻尼与负刚度现象,因此体现出较好的减振效果,其中黏滞阻尼是电磁阻尼器的固有特性,而负刚度现象主要来源于阻尼器质量的影响,即旋转式电磁阻尼器转动惯性矩产生的方向与系统弹性力相反、大小与拉索振动频率成正比的惯性力。此外,利用电磁阻尼器的速度传感功能,下一步还可基于频率法在线辨识拉索索力。
[1]孙利民,周海俊,陈艾荣.索承重大跨桥梁拉索的振动控制装置种类与性能[J].国外桥梁,2001,4: 36-40.
SUN Li-min,ZHOU Hai-jun,ZHEN Aai-rong.Cable vibration control of long-span cable supported bridge[J].Foreign Bridges,2001,4: 36-40.
[2]Krenk S.Vibration of a taut cable with an external damper [J].Journal of Applied Mechanics,2000,67: 772-776.
[3]周海俊,孙利民,周亚刚,等.应用油阻尼器的斜拉索实索减振试验研究[J].公路交通科技,2008,25(6): 55-59.
ZHOU Hai-jun,SUN li-min,ZHOU Ya-gang,et al.A full-scale cable vibration mitigation experiment by using oil damper [J].Journal of Highway and Transportation Research and Development,2008,25(6): 55-59.
[4]Cheng S H,Darivandi N,Ghrib F.The design of an optimal viscous damper for a bridge stay cable using energy-based approach [J].Journal of Sound and Vibration,2010,329: 4689-4704.
[5]王修勇,陈政清,倪一清.斜拉桥拉索风雨振观测及其控制[J].土木工程学报,2003,36(6): 53-59.
WANG Xiu-yong,CHEN Zheng-qing,NI Yi-qing.Wind-rain induced vibration and its control on stayed cables of cable-stayed bridges [J].China Civil Engineering Journal,2003,36(6): 53-59.
[6]李惠,刘敏,欧进萍,等.斜拉索磁流变智能阻尼控制系统分析与设计[J].中国公路学报,2005,18(4): 37-41.
LI Hui,LIU Min,OU Jin-ping,et al.Design and analysis of magnetorheological dampers with intelligent control yystems for stay cables [J].China Journal of Highway and Transport,2005,18(4): 37-41.
[7]禹见达,陈政清,曹宏,等.永磁调节式MR阻尼器试验研究及工程应用[J].振动工程学报,2006,19(4): 532-536.
YU Jian-da,CHENG Zheng-qing,CAO Hong,et al.Experimental study and implementation of the adjustable permanent magnet MR damper[J].Journal of Vibration Engineering,2006,19(4): 532-536.
[8]中野龍児,金子成彦,片村 立太.振動モードの切替えによる斜張橋斜材ケーブルの制振方法に関する研究 (第4報,実大ケーブルへの適用実験)[J].日本機械学會論文集(C編),2002,68(672): 2233-2240.
Nakano Ryuji,Kaneko Shigehiko,Katamura Ryuta.A study on countermeasures against wind-induced cable vibrations in cable-stayed bridge by changing vibration modes (4th report,experimental application to an actual cable)[J].The Japan Society of Mechanical Engineers(C),2002,68(672): 2233-2240.
[9]Palomera-Arias R,Connor J J,Ochsendorf J A.Feasibility study of passive electromagnetic damping systems[J].ASCE Journal of Structural Engineering,2008,134(1): 164-170.
[10]Sodano H A,Bae J S.Eddy current damping in structures [J].The Shock and vibration Digest,2004,36(6): 469-478.
[11]Ebrahimi B,Khamesee M B,Golnaraghi F.Eddy current damper feasibility in automobile suspension: modeling,simulation and testing [J].Smart Materials and Structures,2009,18:015017(1-12).
[12]Cassidy L,Scruggs J T,Behrens S,et al.Design and experimental characterization of an electromechanical transducer for large-scale vibratory energy harvesting applications [J].Journal of Intelligent Material Systems and Structures,2011,22(17): 2009-2024.
[13]Pradono M H,Iemura H,Igarashi A,et al.Passively controlled MR damper in the benchmark structural control problem for seismically excited highway bridge [J].Structural Control and Health Monitoring,2009,16(6): 626-638.
[14]Li H,Liu M,Ou J P.Negative stiffness characteristics of active and semi-active control systems for stay cables [J].Structural Control and Health Monitoring,2008,15(2): 120-142.
[15]汪志昊,杨亚彬.结构振动的负刚度控制[J].华北水利水电学院学报,2012,33(2): 26-30.
WANG Zhi-hao,YANG Ya-bin.Negative stiffness control of structural vibration [J].Journal of North China Institute of Water Conservancy and Hydroelectric Power,2012,33(2): 26-30.
[16]Johnson E A,Christenson R E,Spencer B F.Semi-active damping of cables with sag [J].Computer-Aided Civil and Infrastructure Engineering,2003,18(2): 132-146.
