基于RANSAC算法的地铁隧道点云数据滤波
2014-08-25余鹏磊于海洋谢秋平卢小平
余鹏磊,于海洋,,谢秋平,卢小平,,李 珵
(1.河南理工大学 矿山空间信息技术国家测绘地理信息局重点实验室,河南 焦作 454000; 2. 河南理工大学 矿山空间信息技术河南省重点实验室,河南 焦作 454000)
基于RANSAC算法的地铁隧道点云数据滤波
余鹏磊1,于海洋1,2,谢秋平2,卢小平1,2,李 珵2
(1.河南理工大学 矿山空间信息技术国家测绘地理信息局重点实验室,河南 焦作 454000; 2. 河南理工大学 矿山空间信息技术河南省重点实验室,河南 焦作 454000)
三维激光扫描技术能够快速、有效地获取隧道点云数据,可用于提取地铁隧道的形变信息,但隧道点云数据中包含着噪声点、离群点,需要滤波去除,目前已有滤波算法不适用于隧道环境。文中采用统计特征去除部分噪声点,利用区域增长方法初步提取隧道壁部分点云作为RANSAC算法种子点,进一步利用RANSAC算法拟合数学模型提取隧道壁全部点云数据,并利用RANSAC点云拟合模型对隧道盾构体施工精度进行评估。实验结果表明了方法的有效性。
统计特征滤波;离群点;地铁隧道;区域增长;RANSAC
三维激光扫描技术能够高效获取高密度、高分辨率的目标点云数据,是一种将多种高新技术集成于一体的新型空间信息数据获取手段,在文物景观的三维数字化、大型建筑物的三维重建等领域应用广泛,也适用于地铁隧道变形监测、施工质量检查、竣工验收等。但是获取的隧道点云数据由于隧道设施等影响,包含大量的离群点和噪声点,需通过滤波方法去除。
目前滤波算法主要有数学形态学滤波算法[1]、基于自适应TIN滤波算法[2]、线性预测滤波算法[3]、基于回波强度信息的滤波算法、坡度滤波算法[4]、移动曲面拟合法等[5]。这些滤波算法不同程度上存在一定的局限性,如地形条件、坡度、回波强度信息和局部低点的限制,导致部分信息丢失;隧道点云是封闭空间内曲面上的点,上述滤波方法不能完全适用。本文通过对统计特征滤波器滤波和改进的RANSAC算法的研究,设置合理的参数,得到可靠的隧道点云滤波效果。
1 基于点云统计特征的噪声点处理
激光扫描仪获取隧道点云数据时,由于设备自身的精度、操作人员的经验和环境因素等的影响,获取的隧道点云数据集中存在离群点和噪声点,需要进行滤波处理。
在对获取的隧道点云数据集进行滤波处理时,通过对每个查询点的邻域进行统计分析,设置合理的阈值滤除噪声点。对于离群点移除方法是通过计算获取的隧道点云数据中的查询点到邻近点的距离分布[6]。对每个查询点而言,计算该点到所有邻域点的距离及其平均距离。假定得到的结果是一个高斯分布,该分布的形状由均值和标准差决定,平均距离在所设置的标准范围之外的点可定义为离群点并将其移除。
基于统计特征噪声点处理时首先对隧道点云数据集中的每个点pq的邻域pk进行统计分析,对每个点pq∈P,计算该点到其所有邻域点的距离di,并估算其平均值μk和标准差σk,如果该距离超出平均距离α个标准差,则该点被标记为离群点,并将其移除;若该距离在平均距离α个标准差以内则保留该邻域点为pq的同一类点云。滤波后保留的内点p*表示为

(1)
式中α是点云密度限制因子。
2 隧道壁点云提取
基于统计特征噪声点处理虽然能滤除掉一部分的噪声点,但并不能有效去除所有的噪声点云,本文利用改进的RANSAC算法拟合出隧道模型能实现隧道点云的精确提取。改进的RANSAC算法是根据包含离群点的点云数据集,通过R邻域搜索法搜索查询点一定半径内的邻域点,通过计算点云的法线初步分离隧道壁点和离群点,然后通过在初步处理后的隧道壁点上选取一定的点云拟合隧道壁初始模型,计算其余点到该模型的距离,判断该距离是否大于设置的阈值,如果大于,则滤除掉,否则,归为隧道壁点,然后将这些隧道壁点不断进行加入到初始模型进行迭代计算出隧道模型,从而准确分离出离群点,最终精确提取隧道壁。
2.1 区域增长
由于隧道壁点云与部分离群点点云的距离较小,难以通过统计特征算法进行滤除。本文通过R搜索法来对整个隧道壁点云进行区域增长,然后根据点云的法线方向可有效分割出隧道壁和离群点。区域增长算法计算速度比较快,但其关键因素是种子点的选取和特征参数R的设置。区域增长的流程如下:
1)在图1中选择隧道壁上点Pi作为第一个种子点。

图1 区域增长之后的面片搜索结果

3)在2)中隧道壁点区域中选择未处理的一个点作为种子点继续进行区域增长处理,直到种子点集中的点云处理完毕,说明区域增长处理结束。
表面上一点法线的问题可以近似于估计该表面的一个相切面法线的问题,故可以转换成一个最小二乘平面拟合估计的问题。实质上法线方向计算是分析种子点与邻域点组成的一个协方差阵的特征值和特征向量。对于每一个点pi,其法线计算公式为

(2)

2.2 数学模型的确定
传统的数学模型参考估计方法是根据扫描获得的隧道点云数据集来估计并优化数学模型参数。在隧道点云数据获取中,由于遮挡等问题造成隧道壁上的点云数据缺失,同时点云中也包含离群点在内,使得无法直接利用最小二乘法正确估计模型参数。盾构地铁隧道的标准形状为圆柱模型,首先拟合两侧的边界线,然后根据边界线拟合出隧道中轴线,中轴线经过旋转使其平行于Y轴[8],故其圆柱模型为(x-a)2+(z-c)2=R2。本文采用改进RANSAC算法,在区域增长算法处理之后选择一组正确的点云数据,拟合出初始曲面模型,通过阈值的设置和不断迭代计算出隧道模型,剔除离群点,提取出隧道壁点云。
2.3 RANSAC的基本思想
RANSAC算法是一种从包含离群点的数据集中,随机选取局内点通过迭代方式估计数学模型的参数,为了提高算法的准确度,需提高迭代次数。
本文RANSAC算法提取隧道壁的基本思想如下:
1)在经过区域增长后的隧道较大面片点云作为种子点样本集P拟合隧道的初始化的圆柱模型。
2)计算其余点云到中轴线的距离误差与设置的阈值进行比较,若误差小于阈值,则认为该点为隧道壁点,其共同构成了隧道壁点的一致集;若误差大于阈值,则认为该点是离群点并予以滤除。
3)将2)中新添加的点云数据代入上一次拟合的模型中,重新进行模型计算。
4)判断参与拟合隧道模型的点数是否大于一定的阈值N,若大于,则认为得到正确的数学模型参数,停止迭代,并利用内点集中的点云数据采用最小二乘等方法重新计算该模型;若小于,则将确定的隧道壁点代入模型进行重新计算。
5)直到得到符合规定的模型参数,准备分割提取出隧道壁上的点云数据[9]。
传统的RANSAC算法在选取点云子集S时通常是随机选取的,本文提出的改进RANSAC算法是根据一定的R搜索半径进行区域增长,并根据点云数据法线间夹角来判断部分的隧道壁点云,然后在这些隧道壁点中选取部分点云进行模型初始化,根据其余点到初始模型距离来判断是否为隧道壁点,将新添加的隧道壁点代入模型中进行不断迭代计算,获取隧道模型,最终根据该模型精确提取隧道壁上的点。RANSAC算法流程如图2所示。
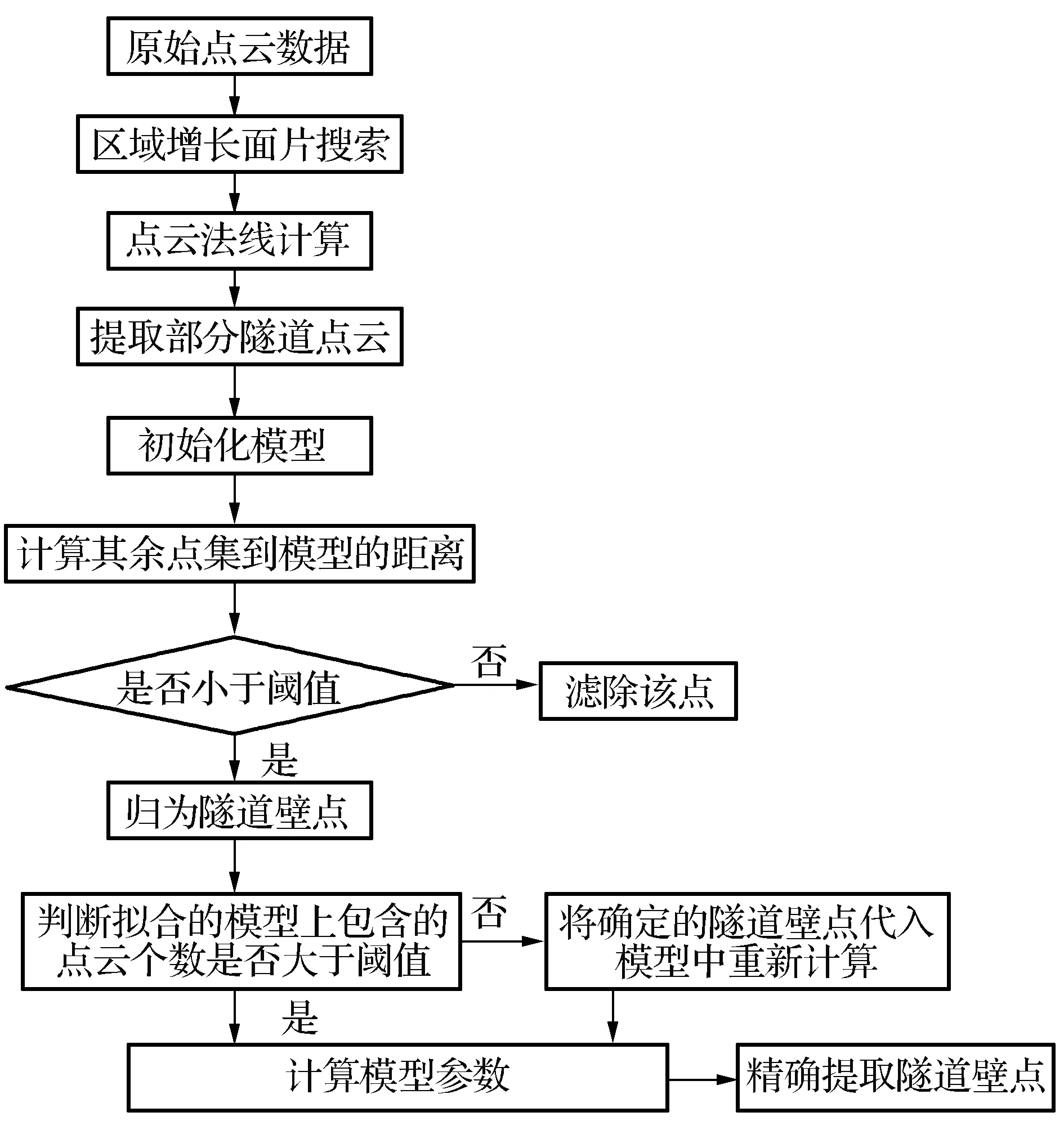
图2 RANSAC算法流程
3 实例验证
3.1 实验数据
实验区位于郑州金水路与民航路交叉口,点云数据由Riegl-VZ-400激光扫描仪获取,获取时间为2013年3月30日。在获取隧道点云数据时,由于仪器本身测距的限制,隧道数据的获取分6站进行。通过扫描仪获取独立坐标系下的点云坐标,故应根据隧道中的控制点通过坐标转换将点云数据转换到绝对坐标系,然后将6站的点云数据进行配准,对其进行整体的滤波处理和隧道断面的提取。本文截取0.5 m宽度的隧道点云作为实验数据,对该试验区48 507个点进行数据滤波及其隧道断面数据提取试验。实验区的点云数据包含隧道面上的点云,钢结构支撑架点云以及管道点云等。统计特征噪声点去除和改进的RANSAC方法的结合能有效滤除离群点,拟合隧道模型,最终得到隧道面片上的点云数据。
3.2 数据处理与精度评定
在基于统计特征滤除离群点的实验中,邻域点数设置为50,点云密度限制因子分别设为1.0和2.0进行结果比较。在改进的RANSAC算法曲面拟合进行隧道壁点云分割提取的实验中,法线方向夹角阈值为0.03π,邻域搜索半径为1.0,最大迭代次数为10 000。实验结果如图3~5所示。

图3 原始图像
图3为原始图像,从图3中可以看出隧道中点云数据包括隧道壁上的点和一些离群点。点云总个数为48 507,经过滤波处理后,α=1.0时,基于统计特征滤波器滤除了4889个点,滤除率为10.08%;α=2.0时,滤除2008个点,滤除率为4.14%。图4(a)、图4(b)分别表示α=1.0和α=2.0时基于统计特征噪声点滤除后的内点可视化结果,由图4(b)可知有些离群点被当作内点而没有被滤除(Ⅱ类误差)。通过图4(c)、图4(d)的比较,可知图4(c)中隧道壁上的一部分轮廓点也被当作离群点而被滤除(Ⅰ类误差)。

图4 基于统计特征滤除离群点
在保证隧道壁完整的条件下,采用基于统计特征滤除离群点(α=2.0)结合RANSAC方法,最终较准确提取出隧道壁上的点云数据(见图5)。

图5 改进的RANSAC提取的隧道壁
Ⅰ、Ⅱ类误差分别为
T1=b/a,T2=d/c.
(3)
式中:a,c分别为手动滤波后隧道点云数据中隧道壁点和离群点的数量;b为隧道壁点被误分为离群点的数量;d为离群点被误分为隧道壁点的数量。在复杂环境条件下,高精度模型通常选择较小的Ⅰ类误差。表1说明结合RANSAC算法的Ⅰ类误差和Ⅱ类误差较小,能保留较好的隧道壁点。

表1 滤波精度评定结果
在进行滤除处理之后,需对提取的隧道模型进行精度评估。在实际隧道施工中,共有26 950个点参与隧道模型的拟合,其隧道管道直径的标准尺寸为5.4 m,采用改进的RANSAC算法拟合的隧道壁的直径为5.405 m,其误差为5 mm。而在施工过程中采用改进的RANSAC算法拟合的隧道壁的标准误差为7 mm,根据盾构法规范规定,其容许标准误差最大为10 mm,故符合规定,可为后续工作提供相关的借鉴。
4 结束语
本文利用统计特征进行部分噪声点的滤除,进一步结合改进的RANSAC算法滤除了大量的噪声点和离群点,拟合出隧道壁模型,精确提取出隧道壁上的点云数据,对隧道施工精度进行了评估。实验结果表明,本文提出的算法具有较高的准确性,可精确提取隧道壁点云,同时也为隧道后期的施工验收提供依据。
[1]黄先锋.机载LIDAR数据滤波方法评述[J].测绘学报,2009,38(5):466-469.
[2]吴丛丛,卢小平,李国立,等.基于TIN的LiDAR数据滤波算法研究[J].测绘通报,2013(3):32-35.
[3]张靖,张晓君,江万寿,等.一种改进的线性预测滤波算法[J].国土资源遥感,2011(1):52-56.
[4]高志国.海量点云数据滤波处理方法研究[J].测绘工程,2013,22(1) :35-38.
[5]曹红新.机载LIDAR数据滤波方法研究[D].四川:西南交通大学,2011.
[6]RUSU R B,S COUSINS.3D is here:Point Cloud Library [C].Shanghai:ICRA,2011:9-13.
[7]KLASING D, ALTHOFF D, WOLLHERR.Comparison of Surface Normal Estimation Methods for Range Sensin g Applications [C].Japan : Kobe,2009:12-17.
[8]拖雷,康志忠.基于三维激光扫描数据的地铁隧道变形监测[D].北京:中国地质大学,2012.
[9]李宝,程志全,党岗,等.一种基于RANSAC的点云特征线提取算法[J].计算机工程与科学,2013,35(2):147-153.
[责任编辑:刘文霞]
Filtering for subway tunnel point cloud data based on RANSAC algorithm
YU Peng-lei1,YU Hai-yang1,2, XIE Qiu-ping2, LU Xiao-ping1,2,LI Cheng2
(1.Key Laboratory of Mine Spatial Information Technologies of NASG, He’nan Polytechnic University, Jiaozuo 454000, China;2. Key Laboratory of Mine Spatial Information Technologies of He’nan, He’nan Polytechnic University, Jiaozuo 454000, China)
The tunnel point cloud data acquired by the three dimension laser scanner quickly and effectively can be applied to the extraction of the deformation information in subway, but the point cloud data in subway contain the noise and outliers, which are needed to be filtered. The current filtering methods are not suitable for the subway environment. A statistical outlier removal method is used to filter some noise. The region growing method is utilized preliminarily to extracta part of the point cloud of tunnel wall as the seed point of RANSAC algorithm. Then the mathematical model is fitted based on RANSAC algorithm to extract the point clouds in subway wall and to evaluate the tunnel shield construction accuracy. The experiment result shows that the method is effective.
statistical outlier removal filter;outliers;subway tunnel;region growing;RANSAC
2013-08-09
国家自然科学基金资助项目(U1304402);河南理工大学博士基金资助项目(B2009-80)
余鹏磊(1986 -),男,硕士研究生.
P234.4
:A
:1006-7949(2014)08-0028-04