智能材料模拟肌体组织柔顺性特征研究
2014-08-08戴金桥俞阿龙王爱民徐宝国
戴金桥, 俞阿龙, 王爱民, 徐宝国
(1.淮阴师范学院 物理与电子电气工程学院, 江苏 淮安 223300;2.东南大学 仪器科学与工程学院, 江苏 南京 210096)
智能材料模拟肌体组织柔顺性特征研究
戴金桥1, 俞阿龙1, 王爱民2, 徐宝国2
(1.淮阴师范学院 物理与电子电气工程学院, 江苏 淮安 223300;2.东南大学 仪器科学与工程学院, 江苏 南京 210096)
针对微创手术训练中现存的柔顺性触觉再现设备大多是机械接触,模拟肌体组织柔顺性特征时容易产生失真的问题,开展了液体智能材料模拟肌体组织的柔顺性特征研究.简单介绍了液体智能材料的流变学特性,进行了体现其柔顺性特征的压力释放实验研究,根据实验结果,利用Kelvin模型建立了其压力释放模型并进行了验证. 利用不同磁场作用下液体智能材料模拟不同肌体组织柔顺性实验,建立了肌体组织压力释放模型并与相应磁场作用下智能材料模型进行了比较. 结果表明液体智能材料在较大程度上能够模拟肌体组织的柔顺性特征.
肌体组织柔顺性模拟; 微创手术训练; Kelvin模型; 压力释放; 液体智能材料
0 引言
微创手术因具有创伤小、出血少、痛苦少、恢复快、疗效好、疤痕不明显、住院时间短、治疗费用低等优点而备受关注,近年来也得到了迅猛的发展.但因为手术过程特别是内脏手术中所用的手术器具长度较长,医生很容易失去对肌体组织的力触觉,触觉的减弱使医生失去触诊能力,特别对组织的柔顺性的感觉,因此医生需要长期和大量的手术训练才能积累足够的临床经验. 研究表明,一名医生要想使微创手术达到熟练的程度需要至少750次的手术过程训练[1].
随着机器人技术、计算机图形学、生物工程学和数学建模技术的高速发展,基于虚拟现实的虚拟手术训练系统为医护人员的手术训练提供了机会.虚拟手术训练过程中,医生通过力触觉设备对虚拟的器官进行手术,感觉好像他们处在真实的环境当中对真实的器官操作一样,虚拟手术中获得的经验可以应用于实际手术中,通过虚拟手术训练的医生在做解剖手术时其速度更快,失误更少并且动作更简洁性得分更高[2].
在虚拟手术训练系统中,力触觉交互设备能否再现肌体组织的柔顺性显得至关重要,目前对柔顺力触觉技术的研究较少,主要有以下几种:基于弹性梁柔性触觉再现[3],电磁驱动的交互设备[4]和基于气动人工肌肉的触觉装置[5]等.也有利用已商业化的力触觉交互设备如Sensable公司的Phantom[6],Immersion公司的CyberForce[7],Force Dimension公司的Delta[8],Omega[9]手控器.国内的上海交通大学、天津大学、哈尔滨理工大学、北京航空航天大学、哈尔滨工业大学等相继开展了虚拟手术力触觉交互设备的研究[10-14].
目前存在的力触觉交互设备基本上是机械接触,在模拟肌体组织的柔顺性和黏性特征时容易产生失真,为此,本文对磁流变液的柔顺性特征进行研究,建立磁流变液在磁场作用下的柔顺性模型,与实际的肌体组织柔顺性特征进行比较,验证磁流变液模拟肌体组织柔顺性的可行性.
磁流变液是一种液体智能材料,在外加磁场作用下,其流变学特性将发生剧烈变化,屈服应力也随着磁场强度的增大不断增大,撤离磁场时能够同样快速地恢复到液体状态[1].磁流变液早已商品化,但其应用仅局限于阀、离合器、制动器和阻尼器等设备.如果磁流变液随着磁场变化后的黏弹性能够模拟肌体组织柔顺性,在微创外科手术的器具手柄中集成磁流变液,可以实现对微创外科医生进行手术训练,因此磁流变液可应用于肌体组织柔顺性触觉交互装置的研制.
1 磁流变液
如图1所示,磁流变液是一种智能材料,在外加磁场作用下流变学特性发生剧烈的变化,是由微米级的可磁极化的粒子分散于合成油中形成的,没有外加磁场时,表现为牛顿流体的特性,当施加磁场时,形成精确可控的屈服应力,为了更好的描述其功能机制,我们假设在两个磁极之间有一个缝隙,两磁极之间无磁场时,磁流变液可以自由通过,但施加磁场时,缝隙中的粒子被磁化并沿着磁场方向排列形成粒子链,这个链可阻碍液体的流动,增大或减小磁场强度可以改变粒子间的作用强度,从而可以连续控制流变学特性.暴露于磁场中,磁流变液在毫秒级时间内能够转变为类固体,磁流变液的流变学特征变化程度与施加的磁场强度呈一定的函数关系,该可控液体的行为经常由宾汉塑料模型来表征:

图1 磁流变液的流变学特性

(1)
式中,τσ为屈服应力,μ为粘度,dv/dy为液体剪切率.
2 柔顺性模型的建立和参数识别
2.1 实验装置
为了在磁流变液样品上施加磁场,我们设计了一个电磁体,设计过程中主要考虑减小磁路中材料的磁阻、引导磁力线全部穿过磁流变液;使磁场能量尽量集中在磁流变液中,减少磁路中其它部位的磁泄漏.为了实现该目标,把磁流变液放置在一块电磁体的空气间隙中,电磁体上串联绕着2 400圈直径为0.8mm的铜线,允许通过的最大电流为1.26A,能够产生足够大的磁场强度来满足实验要求.
2.2 模型建立
一般情况下可用两种现象来描述磁流变液柔顺性特征,即压力释放和蠕变,前者是对磁流变液样本突然施加一个变形并保持该变形为常量,记录其随时间减小的力.后者是对样本在一段时间内保持力大小不变,记录样本的变形.本文只关注压力释放现象,因为压力释放现象容易建立合适柔顺性模型.
利用建立的实验装置将磁流变液样本置于不断增大的磁场中,对磁流变液样本施加给定增幅的形变,获得相应压力释放曲线.实验进行了多次以确保该现象的可重复性,施加的变形增幅为2.5mm,磁场强度不断增大直到磁流变液的磁饱和.
实验中,当未施加磁场时,力为几千分之一牛顿,当施加磁场强度大于0.25T时磁流变液样本达到饱和状态,基本上没有明显的压力释放现象,力为7~8牛顿.因此我们把磁场强度限制于0~0.3T,在该范围内磁流变液的压力释放现象是显著的.为了便于操作,我们将线圈中的电流增量设定为0.05A,相应的磁场强度增量为dB=0.031 T,当B=0.124 T时磁流变液样本压力释放曲线如图2所示.
图2所示的压力释放曲线从开始的峰值、随着时间的释放到最后的稳定值都与Kelvin模型相吻合,因此可用Kelvin模型建立磁流变液的柔顺性模型.鉴于高阶Kelvin模型的复杂性,这里取2阶Kelvin模型,如图3所示,其微分方程为:

图2 B=0.124 T时磁流变液压力释放曲线 图3 2阶Kelvin模型
(2)
式中,F(t)为Kelvin模型的输入力,ε(t)是模型的输出变形,系数a1、a2、b0、b1、b2分别为:


式中的K1、K2和Kr分别是模型的3个弹性系数,η1和η2分别是模型的2个黏度系数如图3所示,微分方程经拉普拉斯变换后得:
Σ(s)=K(s)E(s)
(3)
式中Σ(s)和E(s)分别是F和ε的拉氏变换,其中K(s)为:

(4)
K(s)可理解为压力/变形的传递函数,并且可以表达成具有2个零点和2个极点的有理式:
(5)
式中:

模型的3个弹性系数和2个粘度系数,可对实验数据的分析获得.
设施加的变形是阶跃函数,则
根据式(3)有

(6)
将K(s)代入并展开得
(7)
残差c1和c2由模型参数决定,并且其和为1.将式(7)进行拉普拉斯反变换,得力在时域表达式
(8)
式中:
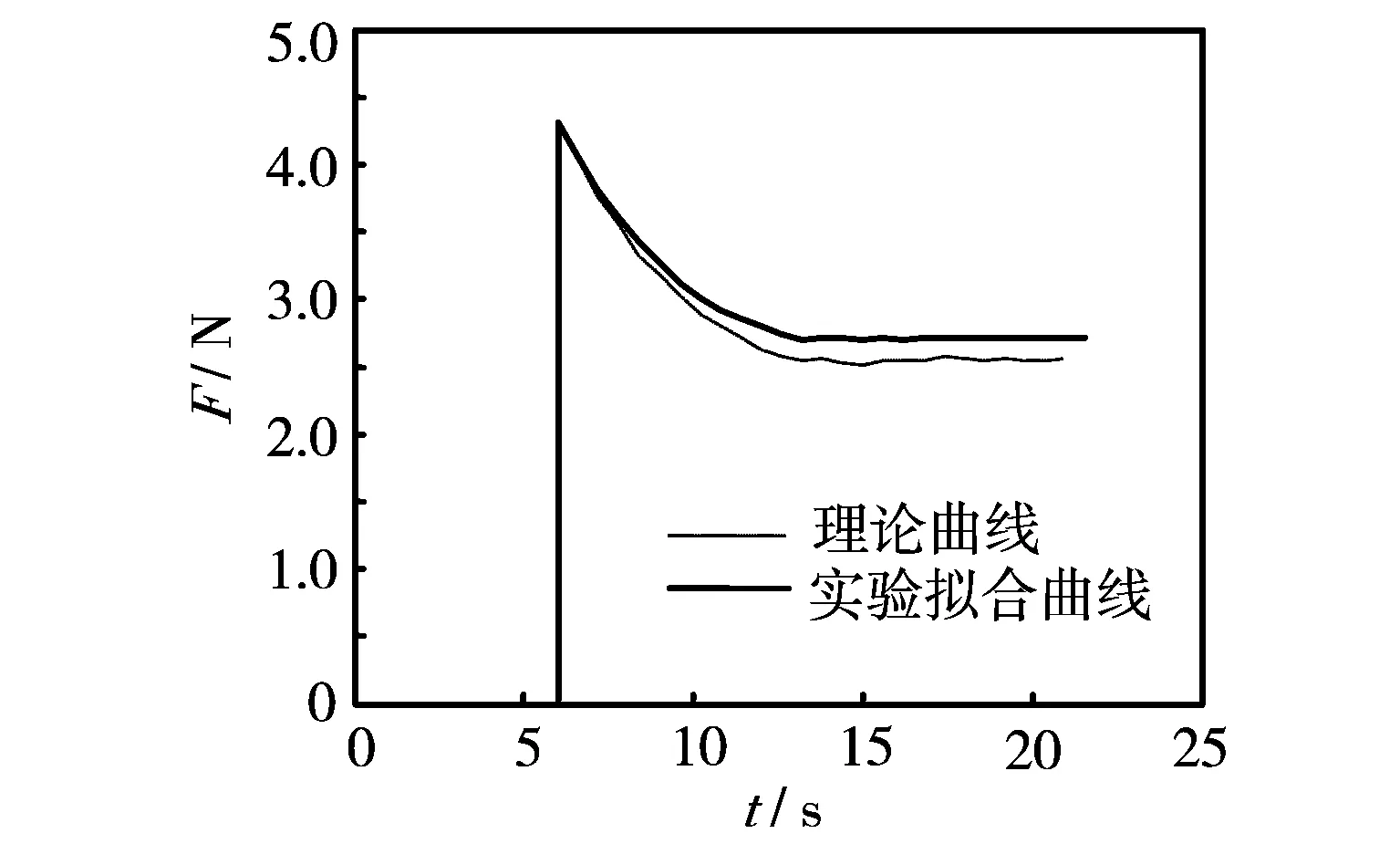
图4 磁流变液压力释放模型与实验曲线
F0=(Kr+K1+K2)ε0,F∞=Krε0,
式(8)也可以表达成适合于数值拟合的形式:
(9)
式中:

所以,力是依赖于时间和5个模型参数的非线性函数,图4中分别为将实验数据拟合曲线和利用Kelvin模型推导的理论曲线,从图中可以看出,理论模型可以较为精确地模拟磁流变液的柔顺性特性.
3 实验研究

表1 磁流变液模拟肌体组织时磁场强度
从上述分析结果可以看出,磁流变液在磁场作用下具有柔顺性特征,但磁流变液能否用于生物组织的柔顺性特性模拟还需进一步验证,为此我们准备3个猪的肌体组织,分别为大脑、脾、肝,每个样本体积切成与磁流变液体积相同,以消除人为干扰的影响,测试者用双手分别触摸肌体组织和磁流变液样本,通过调节施加于磁流变液样本上的磁场强度直到参试者认为两者的柔顺非常相似,这时记录磁场强度,实验重复多次,以取磁场强度的平均值,确保该磁场强度施加于磁流变液样本上时与相应的肌体组织柔顺性达到最大的相似,实验结果如表1所示.
为进一步验证上述实验的有效性,我们运用上文所述的建立磁流变液柔顺性模型方法,对肌体组织样本进行了压力释放实验,确定该压力释放实验可以由二阶Kelvin模型来描述,其参数利用实验数据进行数值拟合估算得到,并通过该方法得到了和3种不同肌体组织相对应磁流变液的模型,分别计算出不同磁场强度下的磁流变液模型参数,估计理论的压力释放曲线.比较由肌体组织推导出来的模型和磁流变液样本模型的理论压力释放曲线如图5所示.从图5中可以看出,肝脏、脾和大脑肌体组织柔顺性和相应磁场作用下磁流变液柔顺性吻合得较好.在图5的每幅图中,较高的曲线是由肌体组织的压力释放,较低点的由磁流变液的压力释放曲线,起始值非常相近,最终值稍有不同,并且释放时间有些不同,事实上,肌体组织的释放时间要比磁流变液的长,但两者的行为还是相当相似的.

图5 肌体组织样本与相应的磁流变液压力释放曲线
4 结论
磁流变液是一种极具应用潜力的新型材料,在磁场作用下屈服应力能够发生剧烈变化. 研究表明,这种变化可在很大程度上能够模拟生物肌体组织的柔顺性特征,如果将磁流变液集成于微创外科手术工具的末端,可用于对医生的微创外科手术训练,因此可以说本文的研究成果为外科手术训练力触觉交互技术的研究提供了较好的参考价值.
由于实验所用样本为已经死亡猪的内脏器官,因死亡动物的器官与活体组织在弹性、黏滞性等特性存在着一定差别,磁流变液能否模拟活体组织的柔顺性还有待进一步验证,因此本课题的下一步工作是开展磁流变液模拟活体动物组织的模拟理论和实验研究.
[1] Vickers A J, Savage C J, Hruza M, et al. The Surgical Learning Curve for Laparoscopic Radical Prostatectomy: A Retrospective Cohort Study[J].The Lancet Oncology, 2009, 10(5): 475-480.
[2] Reznick R K, MacRae H. Teaching surgical skills, changes in the wind[J]. The New England Journal of Medicine, 2006,355(25):2664-2669.
[3] 宋爱国,Dan Morris,J Edward Colgate,等. 遥操作和虚拟操作的实时柔性触觉再现装置研究[J]. 仪器仪表学报,2006,27(2):141-144.
[4] Yuan K, Zhu H B. A new kind of force-reflecting device and its control[R]. Lausanne: Proceedings of the IEEE Conference on Intelligent Robots and System, 2002.
[5] Sun Z S, Bao G, Yang Q J, et al. Design of a Novel Force Feedback Dataglove Based on Pneumatic Artificial Musc-les[R]. Luoyang China: Proceedings of the IEEE International Conference on Mechatronics and Automation, 2006.
[6] Shun L, Banerjee P P, Edward D P. A High Performance Graphic and Haptic Curvilinear Capsulorrhexis Simulation System[R]. Minnesota USA: 31st Annual International Conference of the IEEE EMBS, Minneapolis, 2009.
[7] Andrea F A, Giovanni A, Vincenzo L, et al. A Pervasive Visual-Haptic Framework for Virtual Delivery Training[J]. IEEE Transactions On Information Technology In Biomedicine, 2010,14(2):326-334.
[8] Tholey G, Desai J P. A General Purpose 7 DOF Haptic Interface[R]. Washington: First Joint Eurohaptics Conference and Symposium on Haptic interfaces for Virtual Environment and Teleoperator Systems, 2005.
[9] Ning Y, Guo X J, Li X R, et al. The implementation of haptic interaction in virtual surgery[R]. Wuhan: International Conference on Electrical and Control Engineering, 2010:2351-2354.
[10] 宋亚冲,赖芸,杨扬,等. 五维力反馈虚拟手术装置的优化设计[J]. 中国神经再生研究, 2009,13(26):5087-5090.
[11] Zhao C, Luo X M, Ma F T, et al. Transparency design of a new haptic interface[R]. Yichang: International Conference on Electrical and Control Engineering, 2011:6193-6197.
[12] Wang M N, Chi X, Wang H J. Design and Research of Simulated Surgical Instruments for Medical Training System[R]. Harbin: International Conference on Electronic & Mechanical Engineering and Information Technology, 2011:2175-2178.
[13] Li C B, Wang D X, Zhang Y R. et al. A haptic device for virtual reality dental surgery simulation[R]. Beijing: International Conference on Virtual Reality and Visualization, 2011:179-184.
[14] Li Y, Yan Z Y, Wang H M, et al. Design and Optimization of a Haptic Manipulator Using Series-Parallel Mechani-sm[R]. Chengdu: Proceedings of IEEE International Conference on Mechatronics and Automation, 2012:2140-2145.
[责任编辑:蒋海龙]
Research on Smart Material Simulating Tissues Compliance Characteristic
DAI Jin-qiao1, YU A-long1, WANG Ai-min2, XU Bao-guo2
(1.School of Physical and Electronic and Electrical Engineering, Huaiyin Normal University, Huaian Jiangsu 223300, China)(2.School of Instrument Science and Engineering, Southeast University, Nanjing Jiangsu 210096, China)
Research on smart fluid material simulating tissues compliance characteristic is carried out to overcome infidelity in simulating tissues compliance characteristic by the existing compliance haptic devices because of the mechanical contact. The rheological property of smart fluid materials is shortly introduced. An experiment is done on the stress relaxation which shows tissues compliance characteristic of smart fluid material. The stress relaxation model is set up on the base of the Kelvin model according to the experiment results and the validity is verified. The compliance of different tissues is simulated by smart fluid material applied by different magnetic field. The stress relaxation models of the tissues and the corresponding smart fluid materials are set up and compared. The results indicate that tissues compliance characteristic can be simulated by the smart fluid material to a large extent.
tissues compliance simulating; minimally invasive surgery training; kelvin model; stress relaxation; smart materials
2014-07-22
国家自然科学基金项目(61104206); 江苏省科技支撑计划项目(BE2012740); 淮安市科技支撑计划项目(HASZ2013006)
戴金桥(1973-),男,江苏涟水人,讲师,博士,研究方向为力触觉交互技术、测控技术与智能系统. E-mail: djq@hytc.edu.cn
TP242.6
A
1671-6876(2014)04-0302-05
