无人机航摄大比例尺测图的关键技术分析
2014-08-06刘玉洁崔铁军郭继发刘朋飞
刘玉洁,崔铁军,郭继发,刘朋飞
(天津师范大学城市与环境科学学院,天津300387)
随着城市精细化管理和智慧城市建设的逐步推进,大比例尺地图在城市规划、建设、交通、管理、社会与公众服务以及可持续发展研究等众多领域的作用日益重要[1].传统航空摄影存在任务手续繁杂、对机场和天气条件依赖性较大以及成本较高等问题,造成航摄周期较长,无法满足城市快速发展对高精度影像数据现实性的要求[2-3].无人机具有可避免办理空域申请、机动性强、维护操作简便、可在云层下实施航拍、风险小以及低空高分辨率等优点,是获取小范围大比例尺数据的有效手段,目前被广泛应用于应急监测、震后灾情查看和重建、不可达地区地图数据获取、大比例测图与地图数据获取、地图数据局部更新以及小范围三维模型建立等诸多领域[4-9].但在无人机摄影测量中,由于无人机自重较小,飞行不稳定,且所搭载的相机为非专业测量相机,导致获取的影像数据与定位定向系统(position and orientation system,POS)数据不如大飞机精确,具有像幅小、基高比小、重叠度大、分辨率较高和成果数据量较大的特点[8-11].虽然已有多位学者对无人机影像成图及测图问题[9,12-16]进行研究,但由于无人机自身特点带来的正射影像不能无缝拼接、成图精度不高以及大幅高分辨率拼接影像不能一次生成等问题,造成正射影像精度有限,导致使用具有很大局限.本研究采用理论分析和实例研究相结合的方法,对无人机航空影像镶嵌过程中的影像畸变纠正、控制点布设、影像镶嵌和海量影像镶嵌处理这4个关键技术进行分析,制作出满足大比例尺测图需求的航空影像,并以天津师范大学校园为例进行验证.
1 无人机航空影像处理技术流程
无人机航空摄影测量大比例尺成图过程的主要步骤如图1所示.

图1 无人机数据处理工作流程Fig.1 Workflow of UAV data processing
(1)对无人机影像进行畸变纠正处理,提高影像匹配的精度和效率.
(2)选择可用航带,创建影像金字塔,以便提高在ImageStation自动三角测量(imagestation automatic triangulation,ISAT)中数据处理的速度和匹配点密度.
(3)根据以上相机参数和相机工作方式,使用步骤(2)中生成的金字塔影像数据建立工程、相机和航带.
(4)测量地面控制点[13]应保证地面控制点均匀分布于整个测区范围内.
(5)相对定向是对影像进行匹配,利用计算机对有重叠范围的影像以数字计算的方式完成影像的相关,识别出2幅(或多幅)影像的同名像点.目前影像匹配的基本算法有:相关函数法、协方差函数法、相关系数法、差平方和法和差绝对值和法,这些算法均是基于灰度值进行匹配的方法.
(6)不添加控制点的情况下,进行自由网平差;添加控制点,剔除粗差点,进行控制点网平差.
(7)SSK软件中的ISAT模块可将连接点自动提取到空三计算及分析的全部过程.
(8)正射校正处理是在x轴和y轴负方向纠正影像,同时在z轴负方向使用数字高程模型(digital elevation map,DEM)中的高程数据进行纠正.
(9)将影像镶嵌拼接在一起形成一幅较大的经过色彩调整的正射影像,隐藏原始影像间的接缝.
(10)匀光匀色输出,修改整饰出图.
2 关键技术研究
摄影测量工作过程中存在倾斜误差和投影误差,其中倾斜误差是因相片倾斜引起的像点移位,投影误差是因地形起伏引起的像点移位.通过增加地面控制点数量、做好无人机影像畸变纠正、合理进行影像镶嵌以及小像幅大数据量无人机影像数据处理等关键技术的研究与探讨,改进无人机成像质量和数据精度不高的问题.
2.1 影像畸变纠正
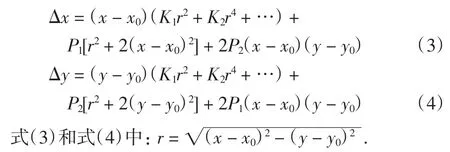
无人机低空航摄采用非量测数码相机,所获影像存在由于镜头设计、制造缺陷和加工安装误差造成的薄棱镜畸变误差,由CCD镜头形状缺陷引起的径向畸变和由光学系统光心与几何中心不一致造成的偏心畸变.CCD引起的误差带来的畸变,由于畸变差对于空三精度具有较大影响,需对影像进行畸变纠正才能用于后期空三处理[17].由于与其他误差相比,由CCD摄像机镜头引起的畸变误差较大,因此,其他误差可以忽略不计,本研究对CCD摄像机镜头畸变误差进行了分析和标定研究,利用标准标定片上三点的实际像素坐标和理想像素坐标,计算出畸变大小和像点在像坐标系中的坐标.像片为横向像幅,以影像中心为坐标系的原点,向右为影像坐标系x轴,向上为y轴.f为相机主距,(x0、y0)为主点,K1、K2[径向畸变系数]和P1、P2[偏心畸变系数]为畸变系数.几何畸变纠正模型[16]为:
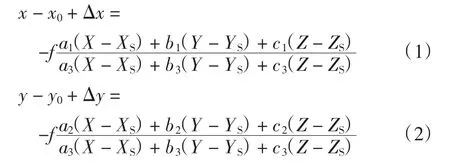
式(1)和式(2)中:(x,y)为像点在像坐标系中的像坐标;(Δx,Δy)为该点与像点处的改正值;(X,Y,Z)是与像点坐标对应的地面点的坐标;(XS,YS,ZS)为摄站坐标;(ai,bi,ci,i=1,2,3)为外方位角元素(φ,ω,κ)所确定的旋转矩阵中的元素.(Δx,Δy)可用式(3)和式(4)表示:
计算及实验结果表明镜头径向畸变较大,切向畸变较小,且图像中心区域畸变很小,边缘畸变大.在精密测量中需要考虑光学成像畸变的影响,并对所测得的图像进行必要的校正.
2.2 控制点布控
由于无人机质量轻,飞行不稳定,其飞行过程中的POS数据精度不高,需要增加地面控制点的数量,以提高测区成图精度.在保证测量人员的人员误差较小、测量温度与大气压适宜的条件下,根据已知地面控制点,采用实时动态定位技术(real time kine-matic,RTK)为无人机航测区域进行控制点加密工作.根据小比例尺地图,设计无人机飞行航带(航向重叠80%左右,旁向重叠60%左右,远大于大飞机航空摄影测量对航带设置的要求),制作精确地面控制点符号(一米见方的十字丝),均匀布设地面控制点.
像控点布设[18]的要求:(1)在测区四周均匀布设.(2)像控点一般应在航向三片重叠和旁向重叠中线附近,困难时可布在航向重叠范围内.(3)大面积无特征区域周围多布设控制点.(4)保证测区内像控点均匀布设,剔除误差较大控制点.
2.3 影像镶嵌
由于无人机采用非测量相机,飞行高度较低,投影误差较大,且其影像不满足共线方程,对于地表高层建筑物无法进行真正射改正,且相机成像原理为中心投影,边缘位置影像投影误差较大,因此需要进行镶嵌处理.影像镶嵌是从已进行正射纠正的影像中提取出满足需要的影像信息,大比例尺成图需尽量满足不出现明显影像间接缝,而自动生成的拼接线不能完全满足需要,因此需要人工交互进行修改.镶嵌线选取及修改应遵循以下原则:(1)尽量采集线性特征的接边线(如道路、河流);(2)避免直接穿过大型建筑物;(3)尽量远离影像边缘;(4)避免直接穿过大面积水区、沙漠、戈壁和森林地带;(5)尽量沿道路和地面实体的边缘.镶嵌线修改完毕后,尽量将整个测区拼接线拼合成一套数据,编辑修改后保存.由于影像获取过程中各种环境因素的影响,影像间存在色差和亮度差异,在调整好镶嵌线之后对影像进行匀光匀色处理,对镶嵌线两侧进行必要的羽化处理,使镶嵌边界处过渡自然,整体影像在纹理、亮度、反差和灰度级色相方保持较好特征.
2.4 海量影像数据处理
无人机航空摄影测量重叠度高带来大量影像信息,增加了影像处理工作量,提高了影像镶嵌和输出难度.影像自动空三需要对所有影像信息进行整体平差处理,提取DEM和正射纠正可以分航带分块处理,临界航带需要重复处理.影像镶嵌工作尽量满足所有影像在同一工程中镶嵌处理,以保证镶嵌线协调统一.对于较大区域,需要在保证具有一定重叠度的条件下对影像进行先人为分块,再镶嵌处理.
镶嵌输出需要在原始编辑好镶嵌线的工程文件下进行.由于无人机低空飞行,采用相机像素高,影像分辨率高,镶嵌后影像数据量较大,受镶嵌软件性能影响(不能输出保存大于4 GB影像),影像镶嵌匀光后输出需分块进行.当需要对工作区域分块时,需在原始编辑好镶嵌线的工程文件下进行,避免输出影像缺失或者出现空洞现象.分块输出的DOM影像文件需要选择能处理大影像的软件进行镶嵌.
3 样区实验分析
实验样区选择坐落于天津市西青区大学城的天津师范大学主校区(经度 117°6′44.11″E~117°7′34.00″E,纬度 39°3′7.24″N~39°4′13.33″N),主校区呈南北向长条形,南北约2 km,东西约1 km,地面高差在1.5 m以内,地势相对平坦,占地面积2.347 km2.
3.1 实验样区数据获取
无人机航空摄影系统是国内自主集成的系统,搭配佳能5D Mark II型数码航摄仪进行航摄,获取真彩色影像数据.像元分辨率为6.41 μm,地面分辨率为0.1 m,相对航高为500 m.由于相幅较小且重叠度较大,航向重叠度为83%左右,旁向重叠度为60%左右,像片数量较大.师大主校区共拍摄像片731张,其中有效航片数为312张,南北方向为航向,共9个航带.控制点数据根据已知的校园少量(2个)控制点位坐标信息使用天宝GPS 5800采用RTK方式测得,数据为西安1980坐标系统下的地理坐标.控制点测量时的点之记为控制点转刺提供准确依据,提高正射影像精度.
3.2 无人机数据处理
由于影像与POS数据质量均不能满足需要,使用畸变纠正算法对影像进行纠正,采用人工匹配同名点的方式进行工作,然后进行相对定向和绝对定向的误差计算,通过交互式对粗差剔除和误差较大的点位进行修改,所有误差均在限差内即可进行自动空三的计算,建立模型.本实例使用14个控制点对校园整个区域进行控制,在14处较明显位置设置检查点来检查生成的DOM精度.表1给出了绝对定向计算的结果.
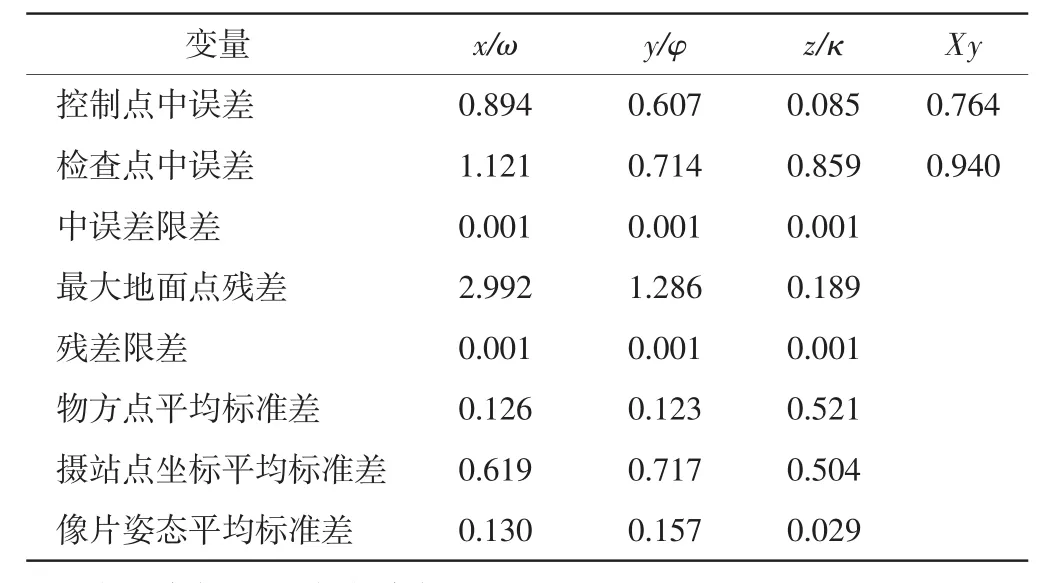
表1 绝对定向结果Tab.1 Results of absolute adjustment
本实例相对定向误差为6.3 μm,满足参考文献[19]中低空数字航空摄影测量的内业规范.文献[19]中相对定向限差为1个像素(6.41 μm)的要求.内业加密点对附近野外控制点的平面位置中误差和高程中误差如表2所示,检查点最大限差如表3所示.
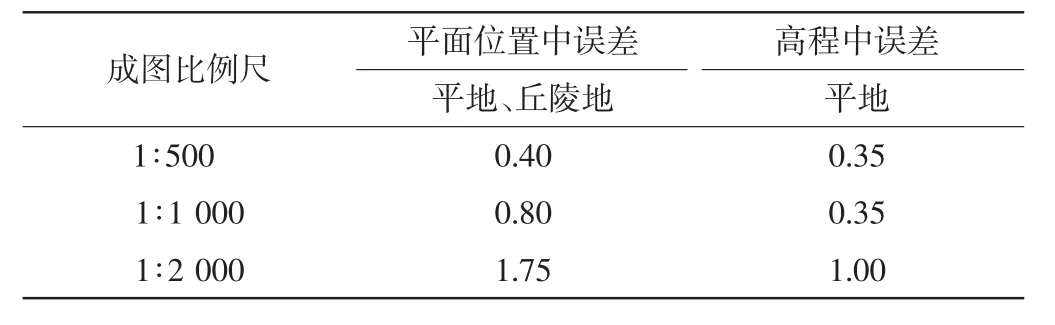
表2 内业加密点对附近野外控制点的误差Tab.2 Mean square error of control points on the field near the encryption points with indoor operation m
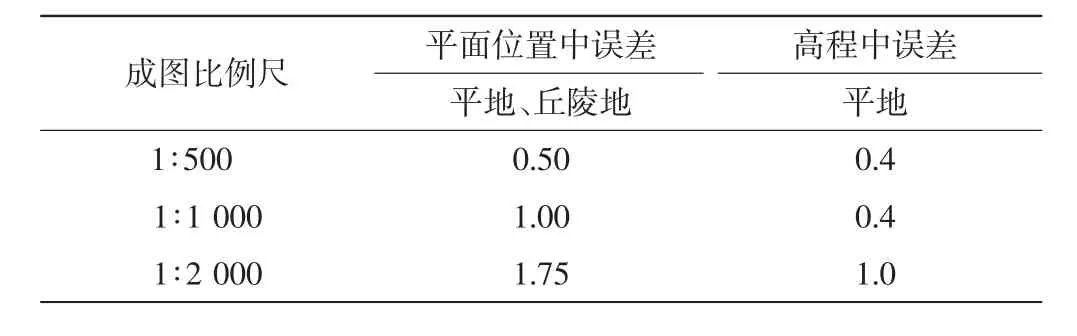
表3 检查点最大限值Tab.3 Maximum limit of checkpoints m
表1显示实例研究区内控制点平面误差为0.764m,高程中误差为0.085 m,与表2对比可知,实例结果满足1∶1 000成图比例尺的要求.
表1显示实例研究区内检查点平面误差为0.940 m,高程中误差为0.859 m,与表3对比可知,实例结果满足1∶2 000成图比例尺的要求.
在Ortho Vista中生成镶嵌线,如图2所示.目视检查调节镶嵌线,对图斑进行匀色匀光处理,生成整幅图像清晰的天津师范大学主校区DOM,如图3所示,图 3(b)为影像拼接全图(图 3(a))中白色矩形范围的放大图.出图前需在ArcGIS中进行镶嵌,通过裁剪工作使边界整齐美观,输出tiff和png等通用图片格式,针对瑕疵位置,结合单幅正射影像使用PhotoShop软件匀色修补完善.
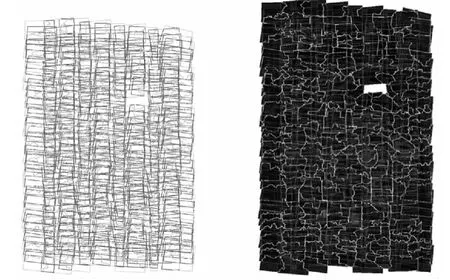
图2 镶嵌线Fig.2 Mosaic lines
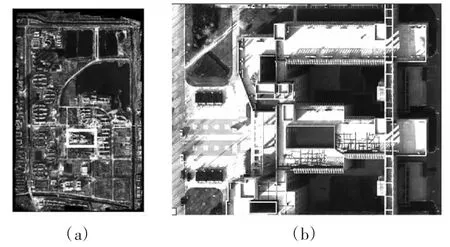
图3 镶嵌图Fig.3 Mosaic image
4 结论
利用实验样区无人机航飞数据,采用自动匹配技术,在尽可能减少地面控制点的情况下进行相对定向和绝对定向,自动空三,生成正射拼接影像.解决了无人机实施大范围、大比例摄影测量中相片畸形矫正、控制点布控、影像自动镶嵌和海量数据处理等关键技术,满足了大比例尺成图精度要求,为高分辨率高精度大比例尺地面正射影像生产提供技术支撑,也为小范围区域大比例尺的测图及三维场景构建提供了有力保障.
[1]EVERAERTS J.The use of unmanned aerial vehicles(UAVs)for remote sensing and mapping[J].The International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2008,37:1187-1192.
[2]BERNI J,ZARCO-TEJADA P J,SUÁREZ L,et al.Thermal and narrowband multispectral remote sensing for vegetation monitoring from an unmanned aerial vehicle[J].Geoscience and Remote Sensing,2009,47(3):722-738.
[3]HARDIN P J,JACKSON M W.An unmanned aerial vehicle for rangeland photography[J].Rangeland Ecology&Management,2005,58(4):439-442.
[4]NIETHAMMER U,ROTHMUND S,JAMES M R,et al.UAV-based remote sensing of landslides[J].Int Arch Photogram.Remote Sensing Spatial Info,2010,38(5):496-501.
[5]郑慧钦.利用无人机航空像片进行大比例尺测图的探讨[J].广东科技,2011(22):183-184.
[6]张庆勇.无人机航摄大比例尺地图试验[J].国土资源,2012(4):92-96.
[7]孙建中.航空遥感在数字化城市建设与管理中的应用前景[J].上海建设科技,2000(3):38-39.
[8]王玉鹏.无人机低空遥感影像的应用研究[D].焦作:河南理工大学,2011.
[9]周占成,朱陈明.无人机航摄系统获取DOM的技术研究[J].测绘标准化,2011,27(3):16-18.
[10]晏磊,吕书强,赵红颖,等.无人机航空遥感系统关键技术研究[J].武汉大学学报:工学版,2004,37(6):67-70.
[11]勾志阳,赵红颖,晏磊.无人机航空摄影质量评价[J].影像技术,2007(2):49-52.
[12]张永军.无人驾驶飞艇低空遥感影像的几何处理[J].武汉大学学报:信息科学版,2009,34(3):284-288.
[13]罗先权,罗甫.无人机航摄系统在大比例尺成图中的应用[J].地理空间信息,2013,11(3):23-25.
[14]李红林.无人机遥感影像空中三角测量应用研究[D].成都:电子科技大学,2012.
[15]王志豪,刘萍.无人机航摄系统大比例尺测图试验分析[J].测绘通报,2011(7):18-20.
[16]赵莹莹.长沙市城市总体规划修编航空摄影测量[D].长沙:中南大学,2012.
[17]陈凤.基于无人机影像空中三角测量的研究[D].南昌:东华理工大学,2012.
[18]王佩军,徐亚明.摄影测量学[M].武汉:武汉大学出版社,2005:126-144.
[19]国家测绘局.CH/Z 3003-2010低空数字航空摄影测量内业规范[S].北京:国家测绘局,2010:2-6.
