基于非线性理论的2K-V型减速机动力学建模技术
2014-07-27韩林山闪修洋
韩林山 闪修洋
(华北水利水电大学机械学院,河南 郑州 450011)
基于非线性理论的2K-V型减速机动力学建模技术
韩林山 闪修洋
(华北水利水电大学机械学院,河南 郑州 450011)
以2k-v型减速机为研究对象,利用等价力学模型的方法,考虑各零件的制造误差、转矩、间隙、惯性载荷和接触变形等因素的作用,对2k-v型减速机的关键零件进行了受力分析,并根据D'Alembert原理,建立了该传动系统动态传动精度的非线性动力学模型。
2k-v型减速机;误差因素;非线性动力学模型
2k-v型传动装置是一种新颖的摆线针轮传动机构,具有传动精度高、传动比大、传动效率高、抗冲击能力强、刚度大、回差小等特点,广泛应用于印刷机械、机器人、自动化设备、起重运输、石油化工等领域。2K-V型减速机传动系统结构图如图1所示。

图 1 2K-V型减速机传动系统简图
日高照晃教授[1-3]通过建立质量弹簧等价模型来分析和研究2k-v型传动机构的动态传动精度;国内学者对该传动系统的传动精度的研究仅限于静态或几何领域,本文在充分分析2k-v型减速机的组成结构、工作原理及传动特点的基础上,在考虑制造误差、间隙、转矩等因素的影响下,对其受力情况进行了全面的分析,从动力学的角度建立了动态传动精度的数学模型。
1 建立质量弹簧等价模型
本文所研究的2k-v型减速机包括1个太阳轮、3个行星轮、3个曲柄轴、2个摆线轮、针轮和行星架等。
由于摆线针轮系统中存在齿轮啮合间隙、零件加工误差、零件弹性变形和轴承间隙等影响因素,导致零件质心的实际位置位置及其转角与理想位置产生了偏差。根据日高照晃的相关研究,通过线位移、角位移来表示理想位置与实际位置的偏差,并把这些线位移、角位移都叫作微位移。研究减速机动态传动精度的力学模型如图2所示。由于摆线针轮传动装置的各零件在制造和装配环节中存在齿轮啮合间隙、加工误差、轴承间隙及零件弹性变形等影响因素的存在,在受力分析中零件的相对转角及实际质心位置都会与其理想位置发生偏差。在2K-V传动系统受力研究中,将各零件的弹性变形、制造误差,装配误差和轴承间隙等影响因素统一到一个质量弹簧等价模型中。在这个质量弹簧等价模型中,每个元件看作一个刚体,并用弹簧表示各个零件之间的接触强度,那么各个零件的装配误差、制造误差、间隙及微小位移等都可以换算到等价弹簧上,称之为“等价误差”。这样,通过等价误差和等价弹簧就可以表示出个零件上的力。各零件间的刚度系数,如太阳轮与行星轮间的啮合刚度系数kj、行星架与针轮间的轴承支承刚度系数kca、曲柄轴与摆线轮轴孔间的轴承支承刚度系数kji、针齿与摆线轮间的啮合刚度系数kjk和太阳轮的支承刚度系数ks、曲柄轴和行星架轴孔间的轴承支承刚度系数kbi,其中ki通过轮齿弯曲变形来确定[4],ks采用计算太阳轮轴的弯曲变形求得,而kji、kbi、kca、kjk采用Palmgren公式[5]确定。
其次是相关的静、动坐标系的确定方法。把固定针轮中心O设为原点,与其轴线垂直的断面设为平面静坐标系(x,y);从太阳轮端即输入端开始,依次对两个摆线轮进行编号j=1,2,并把摆线轮的理论质心Oj设作原点,以摆线轮的偏心方向为ηj轴,以其公转角方向转动90°做ξj轴,建立摆线轮的动坐标系(ηj,ξj)。在建模过程中,设定摆线轮j=1的ηj轴的初始位置与静坐标系x轴方向一致。同时,在动力学模型中,将各等价弹簧安置在各零件轮齿啮合处或坐标轴的正方向接触处,且设定各因素使弹簧受拉为正,受压为负;ϕi表示摆线轮上的曲柄轴轴孔的相对位置,取ϕi=2π(i-1)/3,i=1,2,3,ψj表示两摆线轮的理论质心Oj的相对位置,取ψj=(j-1)π(j=1,2)。

图 2 2k-v型减速机动态传动精度计算的力学模型
2 各零件的受力分析
2.1 太阳轮的受力分析
太阳轮的受力情况如图3所示。图中,ωs为太阳轮的自转方向,xs、ys为太阳轮的微位移,Rsx、Rsy、Rgi为由于转矩Ts的作用在O处及啮合处产生的作用力;Fsx、Fsy、Fspi为由于太阳轮和第i个行星轮的基园偏心误差(Es,βs)、(Epi,βpi)和太阳轮的装配误差(As,γs)的影响在O处及啮合处产生的弹性力。
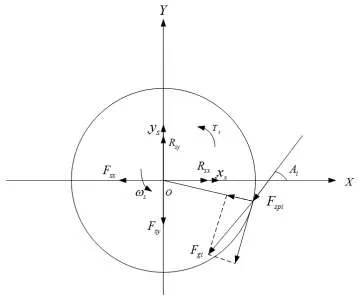
图3 太阳轮的受力
设esx、esy为装配误差(As,γs)在支承处x、y方向上所产生的位移。其大小为:esx=Ascosγs,esy=Assinγs。
则Fsx=ks(xs-esx) Fsy=ks(ys-esy)
设Si为微位移xs、ys在啮合处产生的位移,si=xscosAi+yssinAi;Spi为行星轮的微位移xpi、ypi、θpi-θp在轮齿啮合处产生的位移Spi=-xpicosAi-ypisinAi-Rbp(θpi-θp);
esi、epi为太阳轮基圆偏心误差在啮合处产生的位移
esi=-Escos(θs+βs-Ai),epi=Epicos(βpi-θp-Ai)
则:Fspi=ki(Si+Spi+esi+epi)
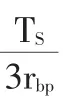
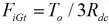
Fgi=TS/3rsb(rsb为太阳轮的基圆半径)
2.2 摆线轮的受力分析
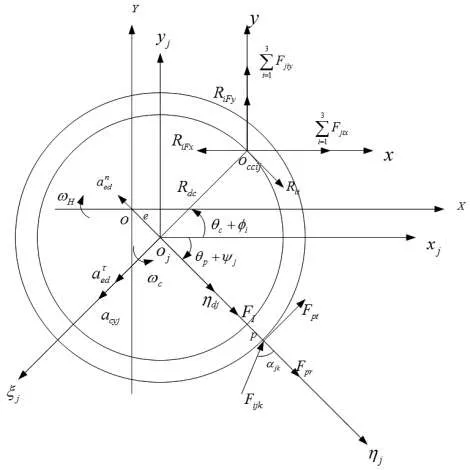
图 4 摆线轮的受力
令摆线轮的3个微位移分别为ηdj、θdj-θc和θoj-θp,其中ηdj表示摆线轮的线微位移,θdj-θc表示摆线轮的自转角微位移,θoj-θp表示摆线轮的公转角微位移。




式中±号是依据摆线轮与曲柄轴接触处的变形量大小进行确定。
④Fijk是由于误差、间隙等因素产生的摆线轮轮齿与针齿间的作用力Fijk=kjk(Sjk+eRk+ePk+eRjk+ePjk+ej+ejk)。
式中,Sjk是摆线轮的3个微位移在轮齿啮合处所产生的位移

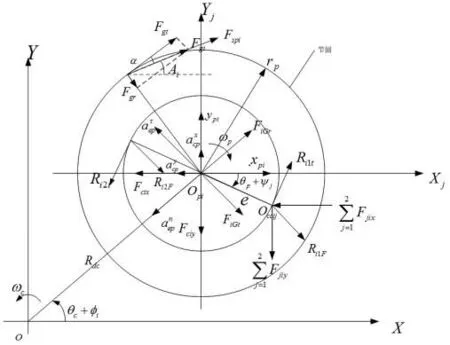
图 5 曲柄轴及其固联的行星轮的受力
eRK是针轮齿槽偏差RK所引起的位移eRk=-Rkcos(αjk-ϕjk)
式中,αjk是第kr个针齿的中心与第j个摆线轮的节点连线和ηj轴正方向和ηj轴正方向间的夹角(°),其中kr=1,2,…Zr;ϕjk——第j个摆线轮ηj轴正方向和第kr个针齿半径方向之间的夹角(°)。
epk是针轮在其圆周方向具有的齿距累积偏差Pk所产生的位移eRk=-Rkcos(αjk-ϕjk)
eRjk是摆线轮齿槽具有的偏差Rjk产生的位移eRjk=Rjkcos(αjk-ϕdjk)式中,ϕdjk是第kr个针齿中心与第j个摆线轮的中心连线和轴ηj正方向之间的夹角。
epjk是摆线轮齿距累积偏差pjk产生的位移ePjk=Pjksin(αjk-ϕdjk)。

2.2 曲柄轴及其固联的行星轮的受力分析(见图5)
①图中,Rit、RiF为摆线轮对曲柄轴承的作用力Ri的两个分力,与上文的摆线轮受力中的曲柄轴对摆线轮的力是一对作用力与反作用力,这里不再详细介绍。

④设Sbix、Sbiy是行星架的三个微位移xca、yca和θca-θc在曲柄轴支承处x、y方向上产生的位移;Six、Siy是行星轮的微位移xpi、ypi和θpi-θp在行星架接触处x、y方向上产生的位移;ecaxi、ecayi是行星架的曲柄轴孔偏心误差为(Ecai,βcai)在x、y方向上所产生的位移;exi是行星架上的曲柄轴孔处的轴承间隙δxi在支承处产生的位移,则由于误差等因素的作用产生的行星架与曲柄轴接触处x、y方向上的作用力:
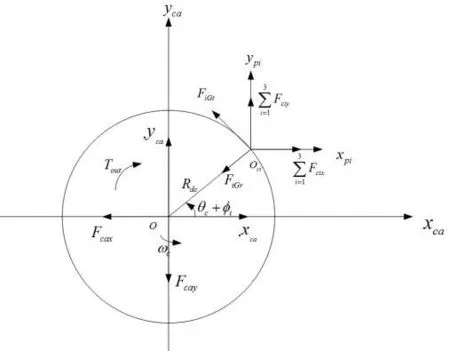
图 6 行星架的受力图

式中±号是根据行星架与曲柄轴接触处的变形量多少来确定。
其具体判断方法为:若Sbix+Six+ecaxi≥-exi,取+号;若Sbix+Six+ ecaxi≤exi,取-号;若-exi≤Sbix+Six+ecaxi≤exi,表明行星架曲柄轴孔处没有接触载荷即Fcix、Fciy的值为零。
2.3 行星架的受力分析
行星架的受力如图6所示,由于建模时传动系统是垂直放置的,所以不考虑由于重力而使行星架所受得支承力。
设行星架的三个微位移为xca、yca和θca-θc,其在壳体支承处x、y方向上产生的位移分别为:Scax=xca,Scay=yca
行星架与减速机壳体间的轴承间隙为δca,则其在支承处所产生的位移为:eca=-δca
综上所述,由于误差的影响使行星架壳体支承处x、y方向上产生的作用力为:Fcax=kca(Scax-ecx±eca)=kca(xca-ecx±eca)
Fcay=kca(Scay-ecy±eca)=kca(yca-ecy±eca)
式中±号是依据行星架壳体支承处变形量的大小来确定。具体判定方法为:若Scax-ecx≥-eca,取+号;若Scax-ecx≤-eca,则去-号;若-eca≤Scax-ecx≤eca,表明行星架壳体支承处没有接触载荷,即Fcax、Fcay的值为零。
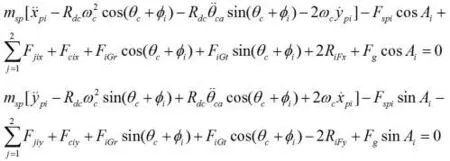
3 系统动力学模型的建立
首先对零件处于理想位置时进行受力状况,然后根据D'Alembert原理建立动态传动系统的动力学模型。
在动力学建模过程中,特别考虑了行星轮、摆线轮及曲柄轴的科氏加速度,系统中的摩擦阻力给予忽略。在啮合过程中,由于轮齿的加工误差、间隙、装配误差以及微位移的作用,其啮合力的方向都会与其理想的啮合方向产生偏移,但是,考虑这些作用都比较小,所以在建模时,可以按照在理想状态时的行星齿轮机构确定其啮合力作用方向,从而忽略啮合力方向的细微改变。
经过整理,2k-v型传动系统的动态传动精度动力学模型为:






式中:ms——太阳轮质量(kg)
msp——曲柄轴及行星轮的质量总和(kg)
mbx——摆线轮质量(kg)
JOP——曲柄轴及行星轮转动惯量(kg·m2)
JOj——摆线轮的转动惯量(kg·m2)
ωc——行星架的理论转动角速度(rad/s)
ωP——行星轮理论自转角速度(rad/s)
TO——外界负载转矩N·m
式中M、C、K分别为质量矩阵、阻尼矩阵和刚度矩阵,矩阵阶数均为20×20;X为位移向量
X=(xs,ys,xp1,yp1,θp1,xp2,yp2,θp2,xp3,yp3,θp3,ηd1,θo1,θd1,ηd2,θo2,θd2,xca,yca,θca);Q是广义力矢量。
由于刚度系数kji,kbi,kca,kjk可以用位移的函数表示,而且存在间隙,所以该系统式非线性的。
4 结语
本文在2K-V型减速机的工作原理及传动特性的基础上,对2K-V型传动系统典型零部件做了全面的力学分析。考虑各零件的制造误差、装配误差、转矩、间隙和弹性变形等因素时的受力情况,利用弹簧“等价模型”方法,建立了双摆线轮、三曲柄、圆盘式输出类型2K-V型减速机的弹簧等价力学模型,为提高2K-V的综合性能等方面的研究打下了基础。
[1]日高照晃ほか.サイクロイド齒車を用ぃたK-H-V形遊星齒車装置の回轉傳達誤差に開する研究(第1報,解析方法).日本耭械學會論文集(C編),Vol.60,No.570,1994.
[2]石田武ほか.サイクロイド齒車を用ぃたK-H-V形遊星齒車装置の回轉傳達誤差に開する研究(第2報,各種加工誤差、组立誤差が回轉傳達誤差に及ほす影響).日本耭械學會論文集(C編),Vol.60,No.578,1994.
[3]石田武ほか.サイクロイド齒車を用ぃたK-H-V形遊星齒車装置の回轉傳達誤差に開する研究(第3報,各種誤差にほす相互影響).日本耭械學會論文集(C編),Vol.60,No.578,1994.
[4]李润方,王建军.齿轮系统动力学[M].北京:科学出版社,1997.
[5]丁长安(导师:朱均,周福章).滚动轴承-主轴系统静动特性研究[D].西安:西安交通大学,2003.
[6]李充宁,孙涛,刘继岩.2k-v型行星传动的结构和力的分析[J].机械传动,2000(2):7-9.
[7]郑州工学院机械原理及机械零件教研室.摆线针轮行星传动[M].北京:科学出版社,1978.
[8]韩林山(导师:沈允文).2K-V型摆线针轮系统动态传动精度的研究[D].西安:西北工业大学,2008.
TH132.4
A
1671-0037(2014)12-97-4
韩林山(1964-),男,工学博士,教授,研究方向:机械设计及理论研究。
闪修洋(1989-),男,在读研究生,研究方向:机械设计及理论。