单载波高速相干水声通信技术研究
2014-07-26余佳超刘文慧
余佳超,刘文慧,苏 为
(厦门大学 信息科学与技术学院,水声通信与海洋信息技术教育部重点实验室,福建 厦门361005)
水声信道是时变、空变多途扩展信道.单载波高速水声通信受通信带宽受限(10km距离上可用带宽小于10kHz)、多途结构复杂(多途时延扩展可达几十甚至几百个码元)、码间干扰(inter-symbol-interference,ISI)严重的影响,传统时域判决反馈(DFE+PLL)结合二阶数字锁相环技术存在易受均衡器阶数、迭代步长初值设定影响的问题,鲁棒性差[1].本文针对水声信道的稀疏特点,采用复杂度较低的稀疏水声信道估计算法(DAMP)估计信道[2],在此基础上设定判决反馈均衡器(DFE)前馈和反馈阶数及权系数初值,提高了均衡鲁棒性和收敛速度.进一步,针对水声信道的时变、空变衰落特点,采用空域分集接收.在不影响通信数据率的前提下,提高了系统鲁棒性.
1 判决反馈均衡器技术
判决反馈均衡器是非线性的,由一个前馈横向滤波器和一个反馈横向滤波器组成,反馈横向滤波器已前达符号的判决序列作为其输入.从功能上讲,通过反馈滤波器从当前估计值中除去了前达码元的干扰,适用于复杂的水声信道环境.但水声信道是一个双扩展信道,不仅具有多途效应,还有多普勒时变效应.为此,Stojanovic[3]提出了内嵌数字锁相环的判决反馈均衡结构,如图1所示.
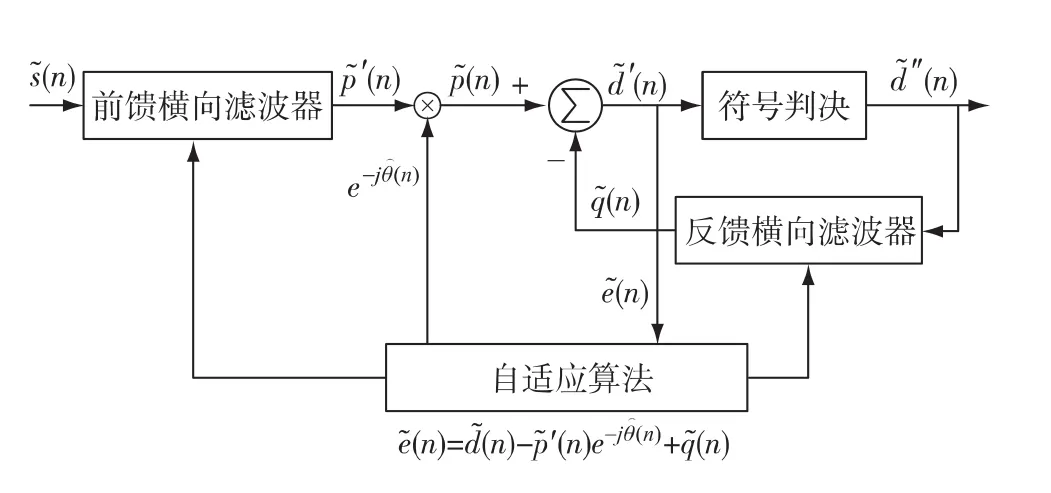
图1 内嵌数字锁相环的判决反馈均衡器结构框图Fig.1 The structure diagram of decision feedback equalization with digital phase-locked loop




在采用最小二乘(LMS)算法时,前馈滤波器权值更新为

反馈滤波器的权值更新式为



对均方误差求导得

令ψ(n)=Im{p′(n)e-j^θ(n)e*(n)},由下式迭代得到对载波相位差的估计值

式中,K1为载波相位的更新步长.为增强载波跟踪能力,可进一步采用二阶锁相环,对应的载波相位迭代公式为

多途传播造成的频率选择性衰落(随时间、空间变化)是高速相干水声通信的一大难题,单通道处理往往有所不足[4].多通道判决反馈均衡器如图2所示.利用了水声信道的空变特性,对抗时、空变衰落,提高通信的鲁棒性.但该技术存在对均衡器阶数、权系数初值)以及迭代步长敏感的缺点.因此,我们对低信噪比下精确的信道估计技术进行了研究,以信道估计结果设计均衡器前馈、反馈阶数和均衡器初值,提高了系统鲁棒性.
2 DAMP
研究中采用DAMP,将信道估计结果变换后作为权值的初值[5].为提高信道估计的准确性,采用循环前缀技术(cyclic prefix,CP),信号结构如图3.信道估计信号连续发送2次,以利于信道估计.其中CP的作用是使信道由线性卷积转化为循环卷积,以利用于频域处理,对信道变化进行跟踪.
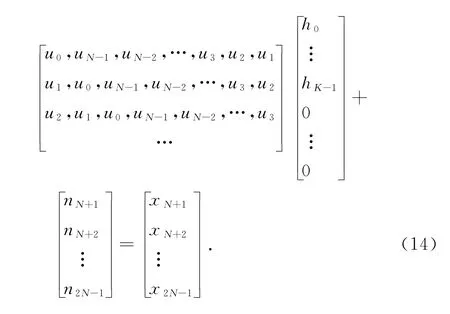
去CP后,信道估计段接收信号表示为


图2 多通道判决反馈均衡器结构图Fig.2 The structure diagram of multi channel decision feedback equalization

图3 发送信号帧结构Fig.3 The structure of sending signal frame

由于h本身具有稀疏性,该问题可采用匹配跟踪(MP)和最优化方法求解.研究中基于MP思想,我们提出了一种低复杂度的DAMP稀疏信道估计算法.利用估计结果,即可对均衡器阶数、初始权值和迭代步长进行最优设计,提高收敛速度,降低均衡器复杂度.
3 实验结果
在厦门港10km距离高速水声通信实验.实验位置处于厦门港航道中,接收端相对发送端更靠近大陆(岛屿).该海域水深在18m左右,最深可达20m.具体实验环境见表1.
同时,信号采用四相相移键控信号(QPSK)的调制方式,其参数见表2.
图4为厦门港区典型信道估计结果.厦门港区水深接近20m,其多途达到时间集中,且存在与主径能量接近的多途信号.图4(b)中红色部分能量最高,蓝色最低.
图5给出单通道接收(对应表3第4路数据)和多通道接收(对应表3第1路数据)的均衡器均方误差收敛曲线.图6为单输入单输出系统(SISO)和单输入多输出系统(SIMO)信号均衡器输出星座图,图7为SISO和SIMO信号处理后的接收端恢复的图片.
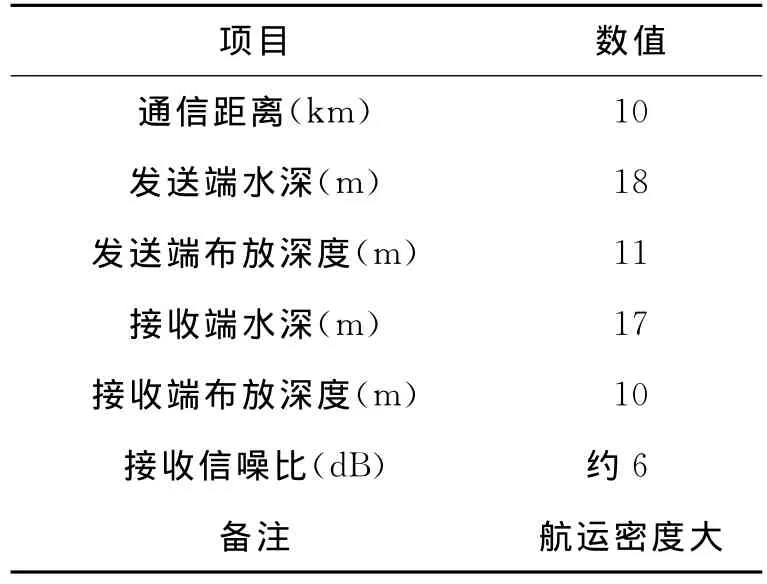
表1 厦门港区海试实验环境Tab.1 The ocean experimental environment in Xiamen Harbor

表2 实验参数Tab.2 The experimental parameters

图4 厦门港区典型信道结构Fig.4 The typical channel structure in Xiamen
对比图5(a)和(b)可以看出,SISO 下,信号的均方误差收敛速度较慢,而SIMO下,信号收敛速度明显快很多,SIMO下有较好的鲁棒性.对比图6(a)和(b)可以看出,SISO下,均衡器输出信噪比已经有较为不错的结果,尤其是第2帧数据,该路数据误码率为1.46%(见表3).而SIMO下,可以看出其均衡器输出信噪比有进一步提高,误码率趋近于0.可见SISO接收在低信噪比下采用本文方法仍然可以收敛,达到1.46%的误码率.但也反映出SISO易受信道时变、空变的影响,鲁棒性差.而采用SIMO接收,即便部分通道性能较差,但通信的鲁棒性显著提高.

图5 均方误差收敛曲线Fig.5 Mean square error convergence curve

图6 星座图Fig.6 Constellation diagram

图7 恢复图片Fig.7 The recovered pictures
表3详细给出了实验结果,其中,第4路处理后误码率相对较大,故在多通道时主要针对这组数据.表中未写出的其他路数据组合的多通道(2个通道和3个通道)处理后,误码率均降低到10-4数量级以下.
给出海试处理结论:1)SISO下,当信道比较简单,信噪比较高时,可以达到0误码率,而当信道相对比较复杂,信噪比较低时,其误码率较大;2)SIMO下,通道数较多或单通道处理时结果较好时,其误码率可以有效降低,其中,实验5误码率降低到0.04%以下,而其他组实验误码率均降到10-4数量级;3)对比SISO、SIMO可以看出,SIMO有更高的鲁棒性,且通道数足够多的情况下,其误码率可以降低到10-4数量级以下.
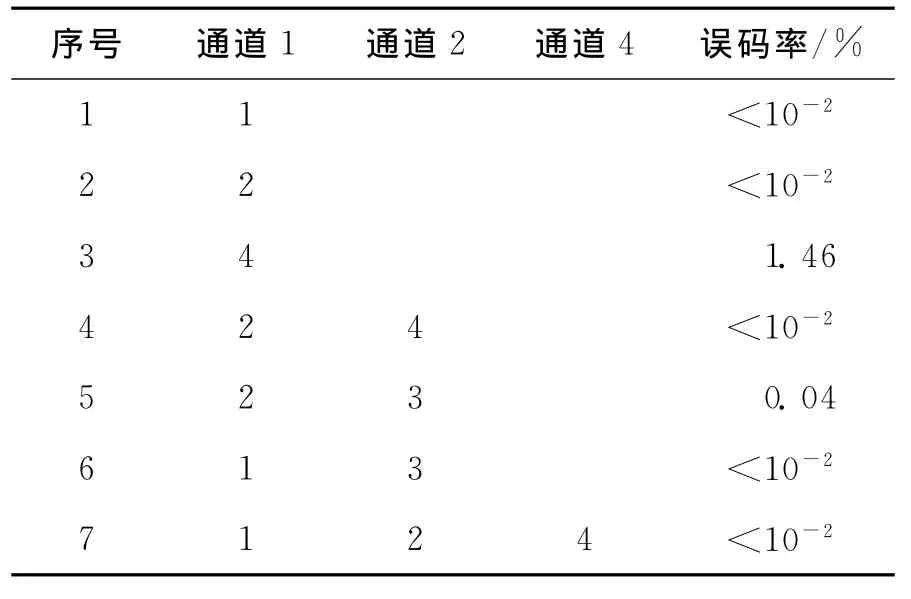
表3 实验结果误码率Tab.3 The experimental result of SNR
4 结 论
论文针对水声信道的稀疏特点,采用复杂度较低的DAMP估计信道,在此基础上设定DFE前馈和反馈阶数及权系数初值,提高了均衡鲁棒性和收敛速度.进一步,针对水声信道的时变、空变衰落特点,采用空域分集接收.在不影响通信数据率的前提下,提高了通信鲁棒性.进行了多次海上实验,表明:在厦门港10 km距离,接收信噪比均值约为6dB的环境下,4kbit/s通信数据误码率均小于2%,传输图片清晰.结合多通道处理,在通道数足够多的情况下,其误码率可以降低到10-4数量级以下.
[1]夏梦露.浅水起伏环境中模型-数据结合水声信道均衡技术[D].杭州:浙江大学,2012.
[2]Xia M L,Xu W,Sun F,et al.Experimental studies of time-reversal underwater acoustic communications[C]∥Proc OCEANS 2009.Bremen,Germany:IEEE,2009:1-5.
[3]Song H C,Roux P,Hodgkiss W S,et al.Multiple-inputmultiple-output coherent time reversal communications in a shallow water acoustic channel[J].IEEE Journal of O-ceanic Engineering,2006,31(1):170-178.
[4]Yang T C.Correlation-based decision feedback equalizer for underwater acoustic communications[J].IEEE Journal of Oceanic Engineering,2005,30(4):865-880.
[5]房栋,李宇,尹力,等.水声通信中一种联合同步均衡的实现方法[J].声学技术,2008,27(5):418-419.