基于虚拟样机的垃圾容器转运车工作稳定性分析
2014-07-25关天民
武 力,关天民,雷 蕾,刘 晓
(大连交通大学机械工程学院,辽宁大连 116028)
垃圾容器转运车是用于城市生活垃圾中转的专用车辆.对于垂直式垃圾压缩中转站,要求垃圾转运车能将垂直放置的垃圾容器背起,水平放置在车上,并且能将水平放置在车上的容器垂直放回泊位.目前垂直式垃圾压缩中转站使用的容器专用转运车架虽然能够实现上述功能,但是存在维护费用较高、操作过程复杂的弊端.通过查阅文献,未见有关垂直式垃圾中转站转运车自主设计和研发的研究报道.现有文献大多关于普通垃圾收集车的车厢压缩机构设计[1]、拉臂车工作装置设计[2]、自卸车作业稳定性分析[3-4]和其他专用车辆的臂架系统设计和仿真[5].本文提出了一种新型的垃圾容器转运车架和工作流程,通过虚拟样机仿真,验证了该车架能够完成垂直式垃圾压缩中转站容器的装载和卸载任务,车架结构简单、操作简便可行.
1 转运车总体方案
1.1 结构方案
垃圾容器转运车是在二类汽车底盘基础上增设转运车架改装而成,主要技术参数尺寸如表1所示,符合国标规定[6].转运车架由底架、翻转架和若干液压缸组成,底架与副车架焊接连接;底架和翻转架在车架尾部铰接连接,之间设有举升和回拉液压缸可实现翻转架的翻转运动;翻转架上设有滑架,滑架通过滑动液压缸可在翻转架的滑道中上下滑动,辅助举升和回拉液压缸完成容器的卸载和装载.整车的设计方案如图1所示.

表1 转运车主要尺寸参数Tab.1 Parameters of transferring vehicle

图1 转运车结构方案Fig.1 Structure scheme of transferring vehicle
1.2 工作流程
以装载流程为例叙述其工作过程,卸载流程为装载流程的逆过程.
(1)将翻转架完全打开,翻转至95°,当车尾与容器距离为300 mm时停车,此时提升滑动液压缸,可保证滑架上的吊钩插入容器的吊耳中,如图2a所示.
(2)回拉液压缸拉动容器翻转,滑动液压缸同步回缩,直至容器底梁与汽车尾部铰接轴接触,此过程容器始终以地面为支点,如图2b所示.
(3)回拉液压缸进一步回缩,滑动液压缸同步回缩,直至滑架触碰翻转架的限位块时滑动液压缸停止动作.回拉液压缸继续缩回,容器脱离地面,如图2c所示.
(4)回拉液压缸继续拉回翻转架,直至与副车架闭合,如图2d所示.
(5)伸长滑动液压缸,推动滑架及其上的容器至限位挡板,滑动液压缸锁定,容器装车流程结束,如图2e所示.

图2 装载工作流程Fig.2 Loading working process
2 虚拟样机建立
利用Pro/E软件建立垃圾转运车的三维模型,通过Mech/Pro接口将转运车模型导入ADAMS,定义材料属性,添加约束、驱动和载荷,最后形成完整的虚拟样机,如图3所示.
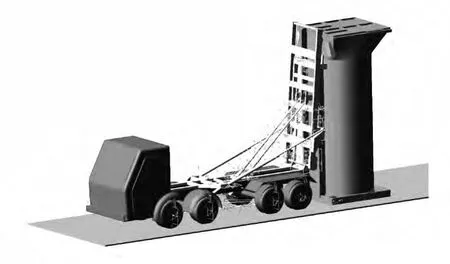
图3 虚拟样机模型Fig.3 Virtual prototypemodel
2.1 添加运动副
设置底架与副车架为固定副连接,底架与翻转架采用旋转副连接,翻转架与滑架采用移动副连接,滑架与容器采用旋转副连接;滑动液压缸活塞杆与滑架采用固定副连接,滑动液压缸缸筒与翻转架采用固定副连接,回拉液压缸缸筒与底架采用旋转副连接,回拉液压缸活塞杆与翻转架采用点线副连接,举升液压缸活塞杆与翻转架采用旋转副连接,举升液压缸与底架采用旋转副连接.
2.2 添加驱动
视液压缸活塞杆相对于液压缸缸体匀速运动,利用STEP驱动函数,在活塞缸与活塞杆的移动副上添加直线驱动Motion,驱动机构进行动作,模拟液压油对活塞的推动作用.
2.3 施加载荷
在系统中施加重力.在轮胎与路面之间定义接触,当两者接触时会产生接触力.测量装载与卸载工况下,车轮所受到的地面反力.
3 稳定性分析
在虚拟样机模型基础上,对转运车的装载和卸载工况进行仿真分析,测量地面对轮胎的支反力,研究转运车工作过程中的稳定性.
3.1 直接背起方式的稳定性分析
所谓直接背起方式是在装载容器时,滑动液压缸自锁,由回拉液压缸直接将容器拽离地面并翻转上车.对此过程进行仿真,地面对前轴轮胎的法向反作用力如图4所示.从图中可以发现,直接装载时,翻转架负载极大,车体无法克服容器重力所形成的阻力矩,导致前轴轮胎脱离地面,接触力从35 kN直线下降为0 N,发生了倾翻事故.因此,必须考虑采用合理的工作流程来避免事故的发生.

图4 直接背起时地面对前轴1的法向作用力Fig.4 Vertical force of front axis 1 on ground when loading directly
3.2 装载流程的稳定性分析
根据第1.2节的工作流程对装载工况进行仿真分析,即在装载容器时,由回拉液压缸与滑动液压缸同步作用,在翻转初期保持容器支点作用在地面,直至容器重心偏移后再将容器拽离地面,然后翻转上车.地面对前轴轮胎的法向反作用力如图5所示.

图5 装载时地面对前轴1和2轮胎的法向作用力Fig.5 Vertical force of front axis 1 and 2 on ground in loading condition
在液压缸启动瞬间,容器对车架的阻力矩最大.由于容器质心突然靠向车架,在刚度和阻尼影响下车架在举升过程中会产生振动.此时,测得的轮胎所受反力亦发生波动.随后在阻尼作用下,波动逐渐衰减趋于稳定.随着车架不断回落,17 s时容器与滑架接触,此时有较大冲击,地面支反力迅速减小后稳定;21 s左右容器脱离地面,前轴1轮胎的地面支反力迅速减小后逐渐增加,前轴2轮胎的地面支反力小幅减小后逐渐增加.在整个装载过程中,地面对前轴轮胎的支反力均大于10 kN并且不会超出其70 kN的额定载荷,说明改进装载方式后,容器负载并未对车体稳定性造成太大影响,前轴轮胎未发生离地翘头事故.
3.3 卸载流程的稳定性分析
根据第1.2节工作流程的逆过程对卸载工况进行仿真分析,得到地面对前轴轮胎的法向作用力曲线,如图6所示.

图6 卸载时地面对前轴1和2轮胎的法向作用力Fig.6 Vertical force of front axis 1 and 2 on ground in unloading condition
在举升液压缸启动瞬间,转运车在刚度和阻尼影响下产生振动,从而使轮胎所受反力发生轻微波动.1 s后在阻尼作用下,波动逐渐衰减趋于稳定.随着容器的起升,地面对前轴轮胎的作用力越来越小,在43 s左右容器接触地面,车架产生振动,地面对轮胎作用力突然增加,随着容器重心偏移回落到地面,地面对前轴轮胎作用力也趋于稳定.由分析可知,在卸载过程中容器负载并未对车体稳定性造成影响,地面对前轴轮胎的作用力始终在5 kN以上,前轴轮胎未发生离地翘头事故,验证了垂直式垃圾转运车卸载流程的稳定性.
4 结论
(1)采用提出的装载和卸载工作流程,地面对转运车前轴轮胎的作用力分别在10 kN和5 kN以上,车体不会发生翘头事故.采用直接装载作业方式,地面对转运车前轴轮胎短暂冲击后,作用力迅速为0 N,会发生翘头倾翻事故.因此,转运车架应按照规定操作流程使用.
(2)在容器与地面、容器与翻转架接触瞬间,前轴轮胎对地面会产生冲击,说明容器对车体各部件也会产生一定冲击,在车架结构和液压系统设计时需考虑该冲击作用.
[1]陈树勋,秦建宁,范长伟,等.一种新型后装式垃圾车结构优化设计[J].计算力学学报,2009,6(26):977-982.
CHEN Shuxun,QIN Jianning,FAN Changwei,et al.The optimum design of a new type of compressed rubbish truck[J].Chinese Journal of Computational Mechanics,2009,6(26):977 -982.
[2]刘大维,刁兵,陈焕明,等.虚拟样机的拉臂车工作装置优化设计[J].现代制造工程,2009(8):135-138.
LIU Dawei,DIAO Bing,CHEN Huanming,et al.Optimum design of hook lift working device based on virtual prototype[J].Modern Manufacturing Engineering,2009(8):135 -138.
[3]严天一,高渐宝,刘大维,等.基于主动横向稳定杆的自卸汽车作业稳定性[J].青岛大学学报:工程技术版,2009,4(24):82 -86.
YAN Tianyi,GAO Jianbao,LIU Dawei,et al.Roll stability of dump truckswith active anti-rollover bars[J].Journal of Qingdao University:Engineering & Technology Edition,2009,4(24):82 -86.
[4]安宁,李秋媚,尹业宏.用 ADAMS分析自卸车作业稳定性[J].湖北工业大学学报,2009,2(24):31 -33.
AN Ning,LIQiumei,YIN Yehong.A study of parametric 3D simulation technology of bridge crane[J].Journal of Hubei University of Technology,2009,2(24):31 -33.
[5]苏小平,殷晨波,王东方,等.混凝土泵车布料臂架系统多体动力学仿真[J].中国工程机械学报,2004,2(2):167 -170.
SU Xiaoping,YIN Chenbo,WANG Dongfang,et al.Simulation of the boom of concrete boom pump truck based on multi-body dynamics[J].Chinese Journal of Construction Machinery,2004,2(2):167-170.
[6]国家质检总局,国家标准化管理委员会.GB1589—2004道路车辆外廓尺寸、轴荷及质量限值[S].北京:中国标准出版社,2004.
General Administration of Quality Supervision,Inspection and Quarantine of the People’s Republic of China(AQSIQ),Standardization Administration of the People’s Republic of China(SAC).GB1589—2004 Limitof dimensions,axle load and quality of road vehicles[S].Beijing:Chinese Standard Press,2004.
