一种惯性测量装置火箭橇试验误差分离方法
2014-07-19魏宗康刘建波段宇鹏
刘 璠,魏宗康,刘建波,段宇鹏
(北京航天控制仪器研究所,北京 100039)
一种惯性测量装置火箭橇试验误差分离方法
刘 璠,魏宗康,刘建波,段宇鹏
(北京航天控制仪器研究所,北京 100039)
惯性测量装置火箭橇试验可以提供大过载环境,为标定加速度计高阶误差项系数提供必要条件。为了利用位置外测信息准确辨识加速度计高阶误差项系数,提出一种针对火箭橇试验的惯性测量装置误差模型参数辨识方法。在给出加速度计高阶误差模型后,该方法通过建立惯性测量装置位置遥测误差和误差模型参数间的线性函数关系构建位置环境函数,之后利用最小二乘法估计出误差系数数值。仿真结果表明,该方法在辨识加速度计高阶误差项参数上具有很高的精度;应用该方法对一次火箭橇试验数据进行误差分离后,通过对解算结果进行显著性分析,证明了辨识出的高阶误差项系数的有效性。
火箭橇试验;环境函数;误差分离;参数辨识
验证惯性测量装置动态性能的主要途径有火箭橇试验、实弹飞行试验、模拟飞行试验、离心机试验、振动试验等。相对于其它试验方式,通过火箭橇试验能够考核惯性测量装置在综合环境下的各项性能指标,验证惯性测量装置误差模型在高动态条件下的正确性,特别是在大过载情况下的高次项的放大作用,能够确定惯性测量装置高次误差项对导航性能的影响,是实现惯性测量装置动态性能验证的最佳途径[1]。除此之外,火箭橇试验还可无损回收被试惯性测量装置,供进一步测量、检查及继续进行试验。高精度的惯性测量装置造价高,通过火箭橇试验可重复进行多类多次的测试试验,包括环境适应性试验和精度试验,增加试验样本量,确保飞行试验一次成功,减小飞行试验次数,降低试验成本,加快研制周期。
在火箭橇试验之后,还需要选择合适的参数辨识方法对试验数据进行处理,以得到较高精度的参数值。对捷联惯导系统误差模型系数进行辨识常用的研究方法有参数的直接标定法和环境函数矩阵分析法。环境函数矩阵是用惯导系统的位置误差、速度误差及姿态角误差对惯导工具误差系数进行求导计算后得到的系数矩阵[2]。它代表了单位惯导工具误差系数引起的“弹道”位置、速度及姿态角的误差。通过环境函数矩阵建立遥外差与惯导系统工具误差系数的函数关系,即遥外差观测方程,分离惯导系数工具误差系数,这种方法称为环境函数矩阵分析法。环境函数矩阵分析法是分离惯导系统工具误差系统的一种有效方法,使用这种方法得到误差模型参数的计算量小、速度快。而相对于环境函数矩阵分析法,采用参数直接标定法对惯性测量系统误差模型进行辨识时,需要采用更高精度的惯性测量系统给出的外测量标准值,而这一要求在实际试验环境中无疑会有更高的实现难度且花费巨大,因此选用环境函数矩阵分析法进行研究是更为合适的。
在文献[3]中,针对惯性器件低阶误差模型应用速度环境函数矩阵进行了分析。因为火箭橇试验所得数据为位置信息,换算为速度信息时已有精度损失,而在试验可激励出误差高阶项的情况下采用低阶误差模型,会降低参数的辨识精度与可靠性。针对这两点,考虑到火箭橇试验主要对加速度计进行激励,本文推导出位置环境函数矩阵,并应用其对加速度计的高阶误差模型进行分析。之后,应用公式对一次火箭橇试验的实际数据进行参数辨识,并对方法有效性进行了验证。
1 加速度计高阶误差模型
由于在重力场试验条件下,惯性器件高阶误差项不能被充分激发出来,所以现有工程误差模型中只考虑到零次项和一次项。火箭橇具有大过载、高动态的特点,能够激发惯性器件(主要是加速度计)的高阶项,进而完善误差模型。而现有工程误差模型在大过载条件下的有效性,也需要通过火箭橇试验来进行验证。
经过完善的捷联系统加速度计高阶误差模型为
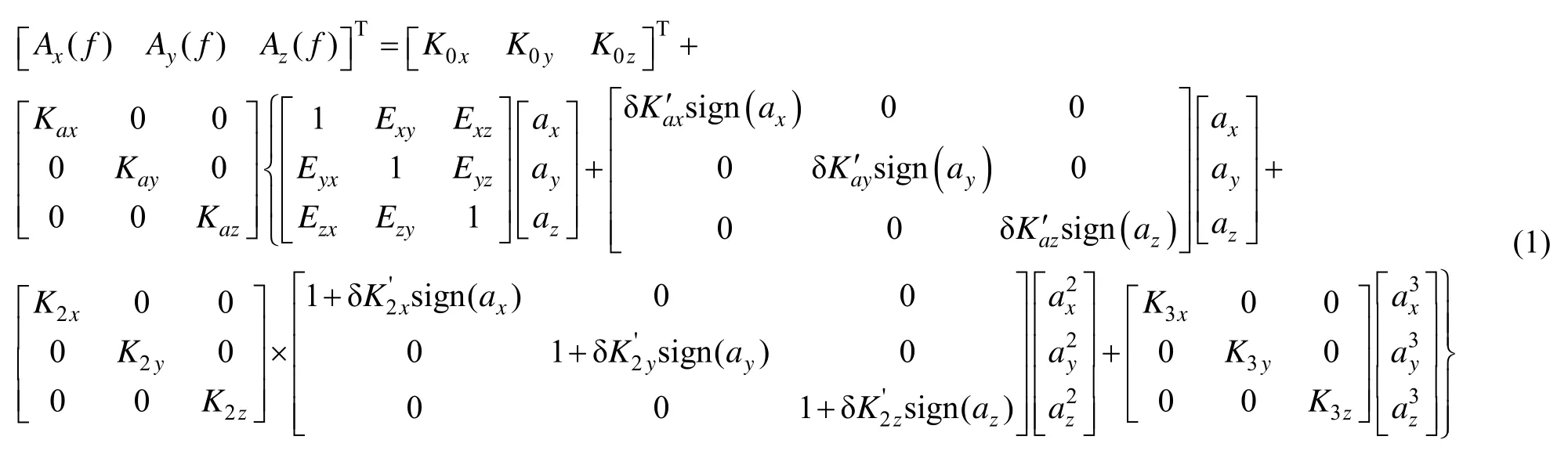
式中,Ax(f)、Ay(f)、Az(f)为X、Y、Z轴加速度计输出脉冲频率(Pulse/s),Kax、Kay、Kaz为加速度计标度因数(Pulse/s/g0),K0x、K0y、K0z为加速度计零偏(Pulse/s),Eyx、Ezx、Exy、Ezy、Exz、Eyz为安装误差角(rad),为一次项不对称系数,ax、ay、az为X、Y、Z轴向惯性加速度(g0),K2x、K2y、K2z为加速度计二次项误差系数为二次项不对称系数,K3x、K3y、K3z为三次项误差系数。
2 位置环境函数
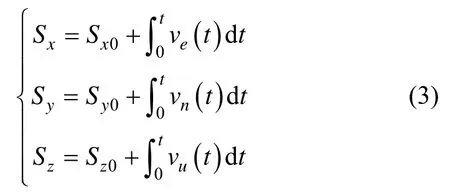
在火箭橇试验中,直接得到的外测量是位置信息,因此需要在速度环境函数的基础上进一步提出位置环境函数分析方法的计算公式。由于火箭橇试验位置信息是一维观测量,即

式中,Sx、Sy、Sz分别为东、北、天三个方向上的位置分量,并有如下关系。
由于火箭橇试验时的轨道近似于水平,有:

另外,由于轨道方向单一,因此可设:
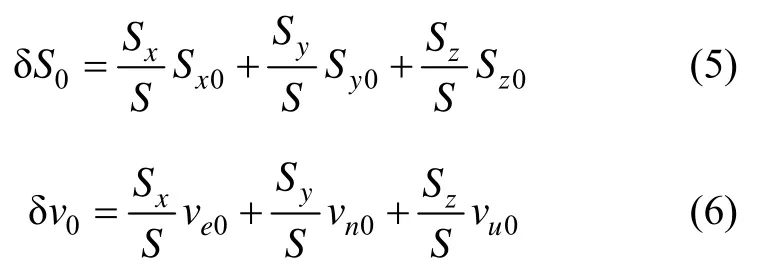
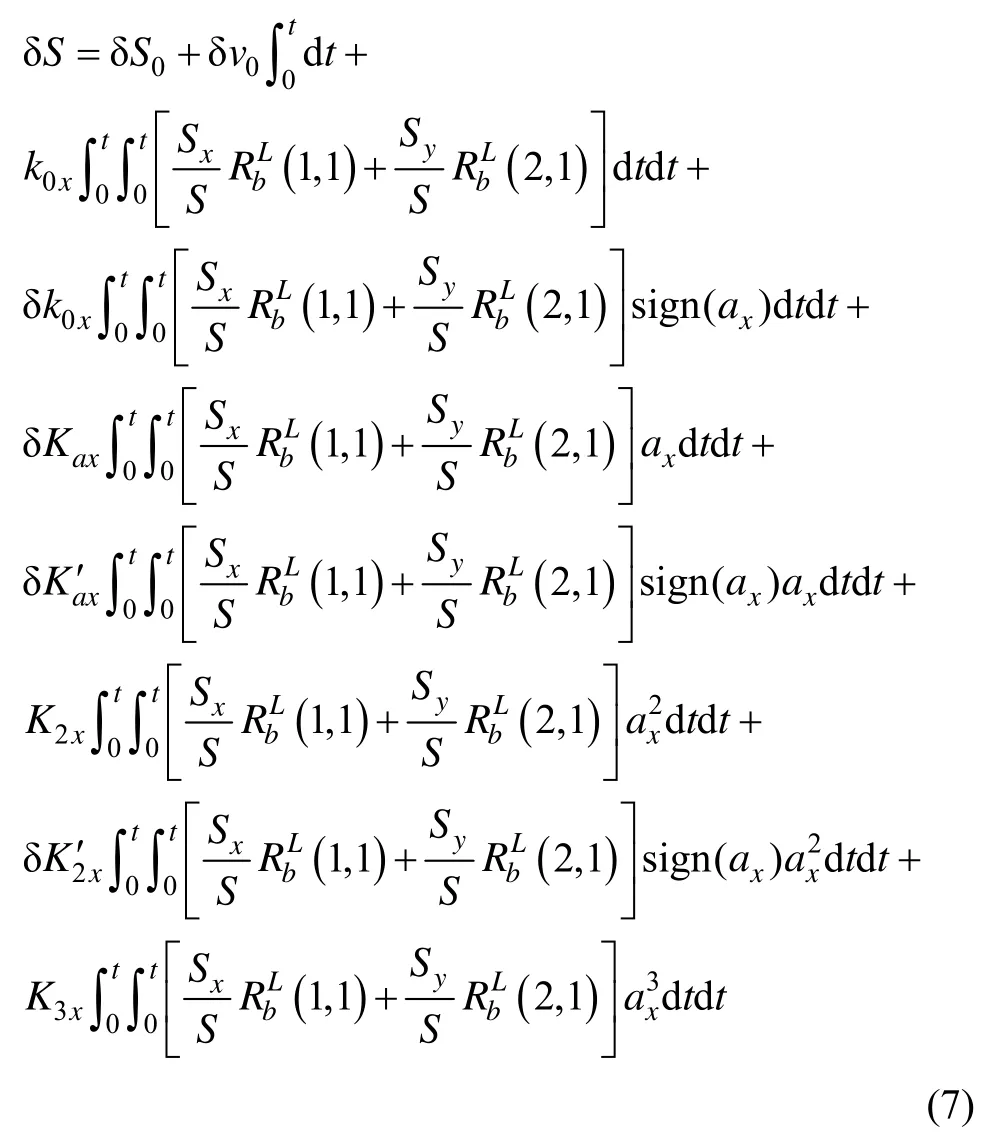
由于此次试验主要考核X轴加速度计,因此环境函数中可忽略与Y轴有关的误差项。再考虑到高度通道可忽略高阶误差项,可得火箭橇试验捷联系统加速度计的位置环境函数方程如式(7)所示。
式(7)中,δS0为初始位置偏差,δv0为初始速度偏差,加入这两项是因为火箭橇试验中遥测和外测设备的初始零点会存在微小偏差。
3 仿真和试验
3.1 算法仿真测试
针对上节提出的算法,使用仿真试验对误差参数辨识精度进行检验。系统输入的仿真过载信号如图 1所示,为了尽可能贴近真实试验数据,已加入了与速度值成正比的随机误差。
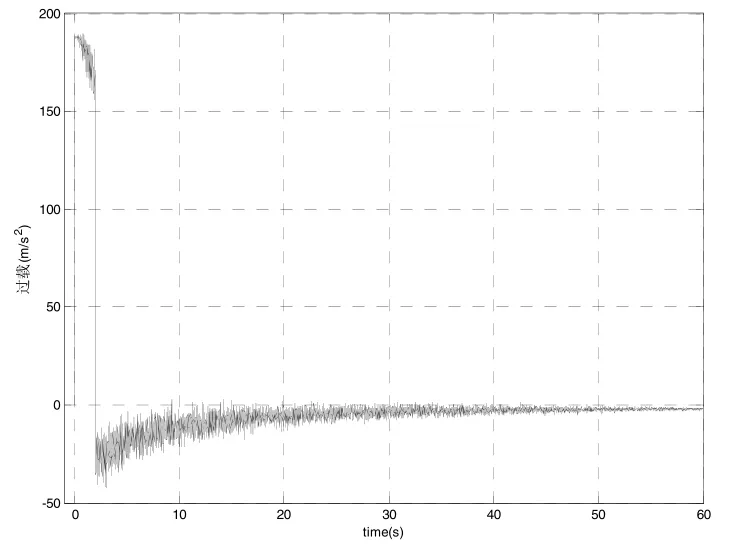
图1 仿真试验过载Fig.1 Overload curve of simulation
仿真数据生成时所用误差模型参数如表1第二列所示,进行参数解算时使用最小二乘方法,具体解算方式如下。
对式(7)的位置环境函数,令
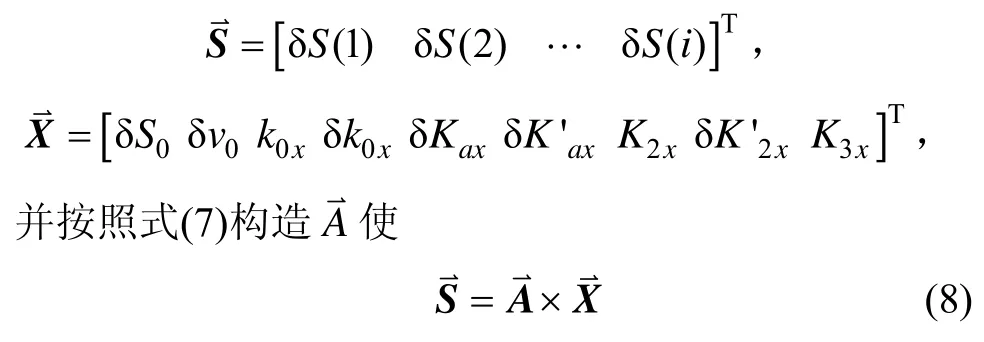

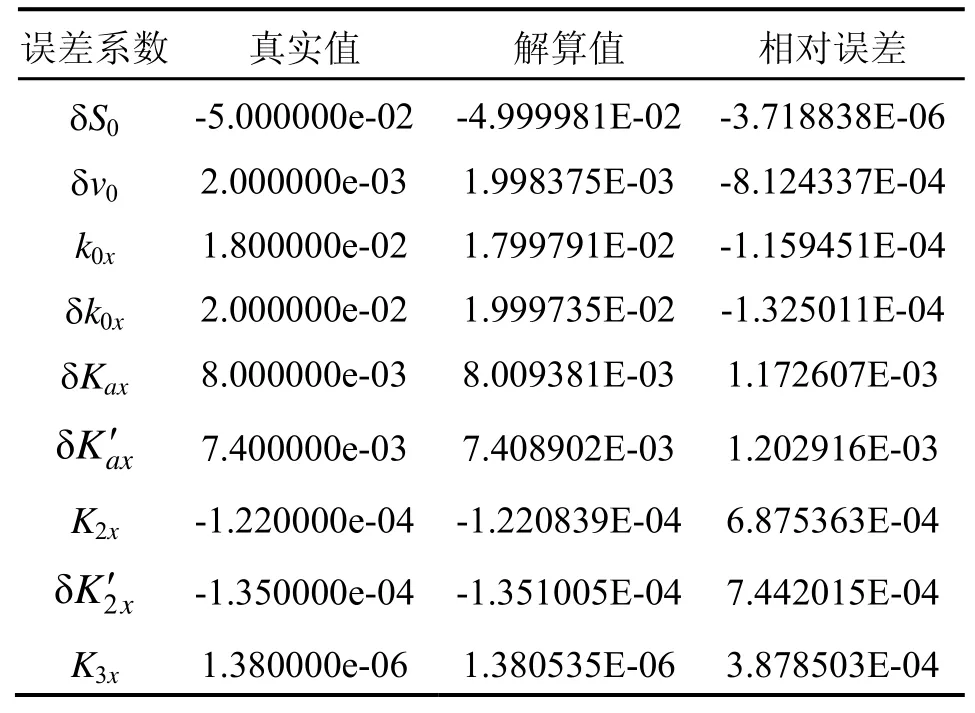
表1 仿真中误差真实值和解算值Tab.1 True value and calculated value in simulation
从表1中可以得出,辨识出的误差参数值的相对误差最大不超过 0.13%,具有很高的精度,可以在实际试验分析中使用。
3.2 实际试验数据分析
采用上述方法对对一次火箭橇试验数据进行分析,该次试验过载曲线如图2所示。

图2 试验过载曲线Fig.2 Overload curve of test
利用遮光板外测数据和末区位置信息的拟合结果见图3,辨识出的误差系数值见表2。
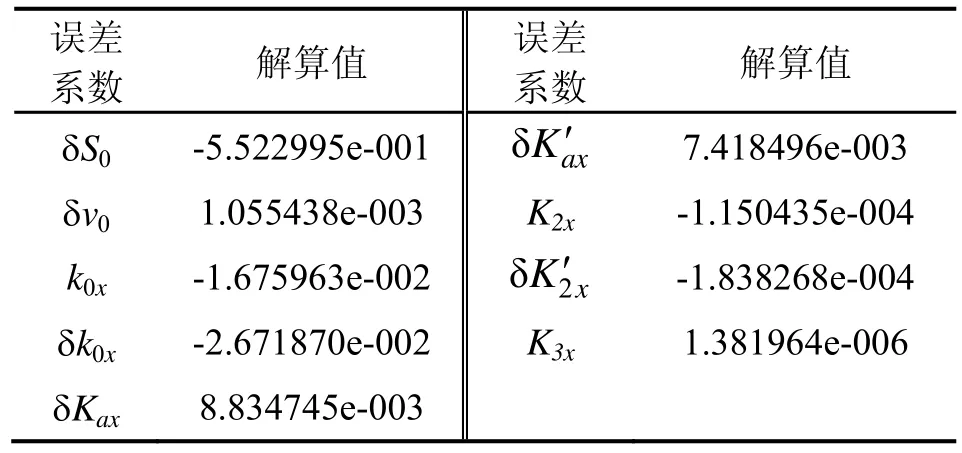
表2 分离的误差系数Tab.2 Separated parameters of error model
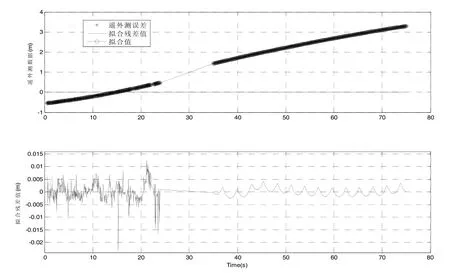
图3 用遮光板组件的遥外测数据以及末区位置信息拟合情况Fig.3 Parameters separated from fusion data
在实际试验中,无法得到系数真值并进行系数辨识精度考察,但可以使用显著性分析方法验证模型误差参数有效性。
对方程(7)进行显著性检验,误差系数n=9,样本值m=883包括482个遮光板数据和401个末区位置信息,有:
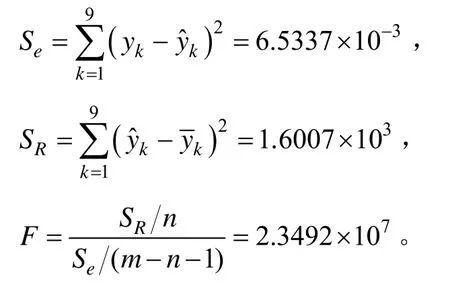
设显著性水平a=0.01,则:

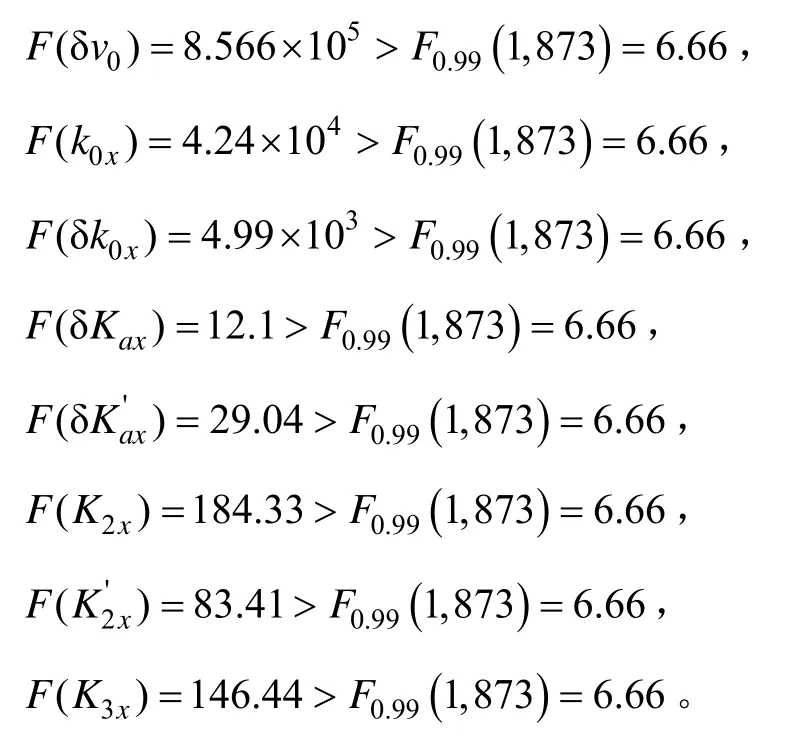
进行显著性分析后分析可以得出,所有系数均显著,即各误差参数在实际中均存在,在实际试验中可以使用式(7)进行数据分析。
4 结 论
本文通过一系列推导,导出了可应用在火箭橇试验中的位置环境函数公式。从仿真试验中可以得出,本方法辨识精度高,参数辨识结果相对误差不超过0.13%;在应用该公式对一次火箭橇试验所得数据进行分析后,成功分离出所有高阶误差系数,进行显著性分析后可以得出,加速度计高阶误差模型中在显著性水平a=0.01的条件下有效,可用于实际误差参数分离解算。本误差分离方法解算过程简单,结果精度高,具有较高的实用价值。
(References):
[1]AFDTC-TP-92-38,6585th Test Group.Honeywell advanced guidance technology advanced inertial measurement unit laboratory and sled test[R].Holloman AFB.New Mexico 88330-5000:Guidance Test Division,1992:10-21.
[2]王超,王跃钢.火箭橇试验分离制导工具误差的有效性分析[J].中国惯性技术学报,2012,20(2):248-252.WANG Chao,WANG Yue-gang.Availability analysis of guidance instrument error separation in rocket sled experiment[J].Journal of Chinese Inertial Technology,2012,20(2):248-252.
[3]陈东生, 魏宗康, 房建成.验证石英加速度计误差模型的火箭橇试验[J].中国惯性技术学报,2009,17(2):236-239+245.CHEN Dong-sheng,WEI Zong-kang,FANG Jian-cheng.Verifying QFPA’s error model based on rocket sled testing[J].Journal of Chinese Inertial Technology,2009.17(2):236-239+245.
[4]Akira U,Mike O,Kohji S,et al.Calibration of three-axis accelerometers using a three-dimensional vibration generator and three laser interferometers[J].Sensors and Actuators A:Physical,2004,114(1):93-101.
[5]Colombatti G,Aboudana A,Ferria F,et al.Huygens probe entry dynamic model and accelerometer data analysis[J].Planetary and Space,2008,56(5):601-612.
[6]Naumann W,Engberg K.Rocket sled improved velocity measuring system feasibility study[R].A subsidiary of flow general,Inc.,1980:15-35.
[7]夏刚,魏宗康,陈东生,等.惯性平台系统火箭橇试验数据处理方法[J].中国惯性技术学报,2010,18(3):368-373.XIA Gang,WEI Zong-kang,CHEN Dong-sheng,et al.Data processing of rocket sled test on inertial measurement unit[J].Journal of Chinese Inertial Technology,2010,18(3):368-373.
[8]Wang Lixin,Xu Junhui,Liu Jieyu.Test data processing scheme of inertial system based on rocked sled[J].Journal of Chinese Inertial Technology,2008,16(3):364-367.
[9]段宇鹏, 魏宗康, 刘建波, 等.惯性测量装置火箭橇试验外测数据融合方法[J].中国惯性技术学报,2013,21(2):209-213.DUAN Yu-peng,WEI Zong-kang,LIU jian-bo,et al.Data fusion method of exterior measurement based on IMU rocket sled testing[J].Journal of Chinese Inertial Technology,2013,21(2):209-213.
Method to separate errors based on rocket sled test of inertial measurement unit
LIU Fan,WEI Zong-kang,LIU Jian-bo,DUAN Yu-peng
(Beijing Aerospace Control Device Institute,Beijing 100039,China)
The rocket sled test of inertial measurement unit(IMU) can provide strong incentive for accelerometer which is necessary when identifying the parameters in high level error model.Aiming at using the location measurement information when separating the coefficients of the high level error model of IMU in rocket sled test,a parameter identification method was designed.With the accelerometer model,a location environment function was built through establishing the linear equation between the location measure error from the IMU and the parameters in the error model.Then by using the least square method,the values of errors were obtained.The simulation shows that this method is of high accuracy when identifying the parameters of high-level error model.The significance analysis on the parameters identified from a rocket sled test shows the effectiveness of high-level error coefficients.
rocket sled test;environmental function method;error separate;parameter identification
U666.1
:A
1005-6734(2014)01-0131-04
10.13695/j.cnki.12-1222/o3.2014.01.026
2013-08-22 ;
:2013-12-13
民用航天专业技术预先研究项目(D010101)
刘璠(1987—),男,工程师,从事组合导航研究。E-mail:finelf@sina.com