一种纬度未知的全姿态光纤陀螺寻北方法
2014-07-19王海明李四海
王海明,李四海
(陕西华燕航空仪表有限公司,汉中 723102;2.西北工业大学 自动化学院,西安 710129)
一种纬度未知的全姿态光纤陀螺寻北方法
王海明1,李四海2
(陕西华燕航空仪表有限公司,汉中 723102;2.西北工业大学 自动化学院,西安 710129)
常规光纤陀螺寻北仪采用 4位置法、多位置法和旋转调制法等,当基座有俯仰角或倾斜角时均需要输入测量地纬度才能完成寻北,这种要求已制约了寻北仪在快速机动的现代战争中的应用。根据地球自转角速率为常量的特性,通过在正交坐标系中“虚拟”天向角速率测量陀螺,提出了一种仅需一个光纤陀螺和一个加速度计通过三位置转位来实现全姿态寻北的方法,该方法使寻北仪在纬度未知时也可全姿态高精度寻北,并输出载体姿态角和测量地纬度值。经工程样机验证,使用随机游走的光纤陀螺和50 μg零偏重复性的加速度计可达到0.06°的寻北精度。
光纤陀螺;寻北仪;三位置法;虚拟陀螺;纬度
寻北仪能够为载体提供准确的航向信息,在国防军事和民用领域发挥着重要的作用。传统的寻北仪主要使用双轴挠性陀螺作为惯性传感器,由于挠性陀螺属于转子式机电陀螺,其寿命和抗振动冲击能力均有限。光纤陀螺(FOG)是基于Sagnac 效应的新型全固态陀螺仪,是一种无机械转动部件的惯性测量元件,具有寿命长、可靠性高、耐振动冲击等优点,用光纤陀螺构成寻北仪是技术发展的必然趋势[1]。
由于光纤陀螺为单轴陀螺,常用静态测量的4位置法、多位置法和动态测量的旋转调制法来完成寻北[2-4]。这些方法在水平测量时不需要知道本地纬度就可工作,但在有俯仰角和倾斜角的全姿态方式下工作时必须要输入测量地纬度才能完成寻北。在快速机动的现代战争中如果每次寻北时都要求知道测量地纬度将大大降低寻北仪的使用价值。基于地球自转角速率为常量的特性,本文通过在正交坐标系中“虚拟”天向角速率测量陀螺的基础上,巧妙构造算法,提出了一种仅需一个加速度计和一个光纤陀螺通过三位置转位来实现寻北的方案,该方案不需要知道本地纬度即可使寻北仪在全姿态下快速完成寻北,还能自行计算出本地纬度并输出载体的两个姿态角。
1 常规光纤陀螺寻北方法
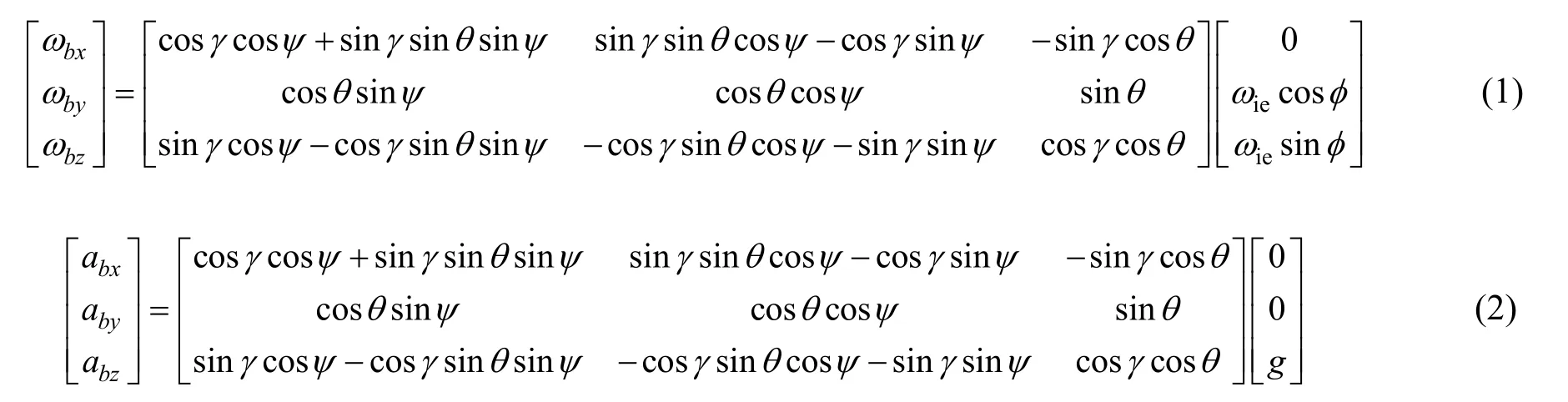
定义纬度用φ表示,北纬为正;北向角用ψ表示,顺时针为正;俯仰角用θ表示,抬头为正;倾斜角用γ表示,右倾为正。地球自转角速率用ieω表示,当地重力加速度用g表示,寻北仪与载体固联,其基准轴与载体首尾线平行,则载体三轴向的地球自转角速率分量和重力加速度分量计算如公式(1)和公式(2)所示[5-7]。
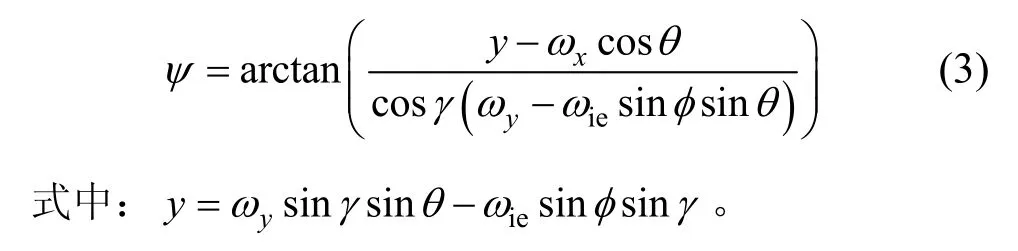
常规4位置法或多位置法寻北通过对称位置的测量消除陀螺常值漂移和加速度零偏后,计算出平台俯仰角θ和倾斜角γ,再使用公式(3)计算出北向角ψ,从公式(3)中可以明显看出,当有俯仰角或倾斜角需要知道测量地纬度φ才能计算出北向角。
2 光纤陀螺三位置法寻北方法
光纤陀螺寻北仪内部结构如图1所示。其中机体坐标系X轴、Y轴和Z轴分别指向载体右侧、载体头部和载体背部。将光纤陀螺和加速度计固联安装在转盘上,光纤陀螺的敏感轴与加速度计的敏感轴平行。初始位置光纤陀螺和加速度计的敏感轴指向与载体头部指向一致。转位机构可采用步进电机或力矩电机驱动,通过机械限位使电机堵转或通过光电编码器读取位置信息来控制转位位置。

图1 光纤陀螺寻北仪内部结构示意图Fig.1 The inner structure of FOG north-seeker
寻北仪上电后电机带动转盘逆时针旋转到第1位置,在此位置时陀螺和加速度敏感轴与载体头部指向一致,稳定60 s后进行第1位置陀螺和加速度计输出采样;采样完成电机带动转盘顺时针转动 90°后再次稳定,然后进行第2位置陀螺和加速度计输出采样;第2位置采样完成,电机带动转盘顺时针继续转动90度到进行第3位置,稳定后进行第3位置陀螺和加速度计输出采样;利用以上3个位置的采样数据即可完成寻北。采样完成电机带动转盘回位,寻北仪等待下一次测量指令或延时自动断电。
3 光纤陀螺三位置法寻北算法
设光纤陀螺的常值漂移为ε,加速度计的常值零偏为▽,忽略随机漂移。则在第1位置时,光纤陀螺的输出和加速度计的输出a1分别为:



由于θ和γ取值范围为-90°~90°,所以cosθ和cosγ单值确定,由式(4)~(6)得:


又由公式(1)得:

则北向角:

测量地纬度:

将通过式(8)~(12)求得的变量代入式(16)~(18)即可求得ωxx、ωyy、ωzz,再将ωxx、ωyy、ωzz代入式(19)即可计算出载体的北向角,整个计算过程不需要知道测量地纬度。同时通过式(8)(9)可得到载体的俯仰角和倾斜角,通过公式(20)还可计算出测量地纬度值。如果寻北时间宽裕,仍可沿用4位置转位,其中一个位置为备用位置,可提高特定角度的寻北精度。
由于北向角定义为顺时针方向,取值范围为 0°~360°,其真值由表1确定。

表1 北向角真值确定表Tab.1 Determination of true north-angle
4 误差补偿及实验验证
系统的误差主要由角速率测量误差、姿态角测量误差、转位误差和结构误差引起[8-10]。由于本方案中已通过对称的1位置和3位置补偿了陀螺常值漂移和加速度计常值零偏,通过选择高精度的陀螺和加速度计来减小随机漂移的影响可提高角速率和姿态角的测量精度,通过数字滤波可以滤除外界的干扰信号。转位误差主要是机械限位的加工误差或编码器误差造成的,结构误差既包含陀螺和加速度计之间的失准角,也包含惯性元件测量基准与寻北仪外部安装基准之间的失准角。对于装配生产好的一台寻北仪来说,转位误差和结构误差是固定的,在整周寻北误差中表现为北向角的三角函数关系,可在系统级标定后通过FFT进行补偿。
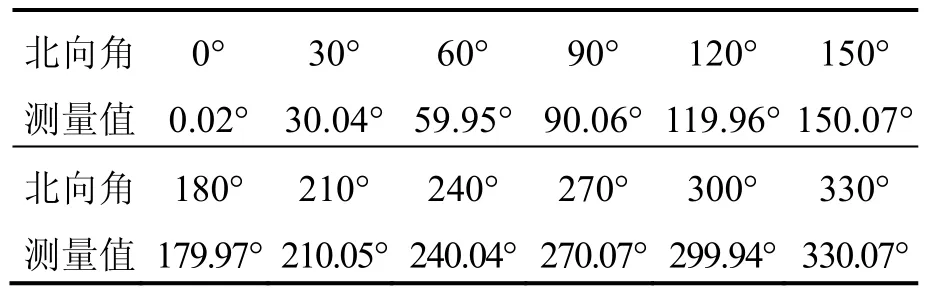
表2 寻北仪测量及误差数据Tab.2 Measure and error data of north-seeker

图2 光纤陀螺寻北仪Fig 2 The figure of FOG north-seeker
4 结 论
根据地球自转角速率为常值的特性,在正交坐标系中利用两轴向的角速率测量值间接计算出的第三轴角速率值。仅使用一个光纤陀螺和一只加速度计,通过三位置转位和构造算法可以实现测量地纬度未知的全姿态寻北。通过样机验证对应随机游走的光纤陀螺和50 μg零偏重复性的石英加速度计其寻北精度达0.06°。该寻北方法还能附加计算出载体姿态角和测量地纬度值,既提高了寻北仪的使用价值又拓展了寻北仪的应用领域。
参考文献(References):
[1]王志乾,赵继印,谢幕君,等.一种快速高精度自主式寻北仪设计及精度分析[J].兵工学报,2008,29(2):164-168.WANG Zhi-qian,ZHAO Ji-yin,XIE Mu-jun,et al.Design and accuracy analysis for a fast high precision independence north-seeking[J].Acta Armamentarii,2008,29(2):164-168.
[2]王立冬,刘军,鲁军.多位置寻北误差与陀螺数据采集时间的关系[J].中国惯性技术学报,2011,19(3):286-289.WANG Li-dong,LIU Jun,LU Jun.Relation between north seeking error of multi-position gyroscope north seeker and sampling time[J].Journal of Chinese Inertial Technology,2011,19(3):286-289.
[3]王斌,翁海娜,刘畅,等.正交检测技术在光纤陀螺寻北以中的应用[J].中国惯性技术学报,2013,21(2):164-168.WANG Bin,WENG Hai-na,LIU Chang,et al.Orthogonal detection technology for north seeker base on single axis fiber optic gyroscope[J].Journal of Chinese Inertial Technology,2013,21(2):164-168.
[4]白云超,李学勤,马小辉,等.采用旋转调制技术的高精度寻北方案[J].中国惯性技术学报,2010,18(4):421-424.BAI Yun-chao LI Xue-qin MA Xiao-hui,et al.Highprecision north determining scheme based on rotationmodulation technology[J].Journal of Chinese Inertial Technology,2010,18(4):421-424.
[5]Ren Chunhua,Pan Yingjun,He Tong,et al.Research and implementation of a new orientation &incline instrument used in oil and gas wells[C]//The Ninth International Conference on Electronic Measurement &Instruments.2009:1027-1030.
[6]Eduardo S R,Vladimir A N.Comparison between two basic schemes in function of the true earth’s north detection [C]//Saint Petersburg International Conference on Integrated Navigation Systems.2006:315-318
[7]韩新建,邓年茂,王建钊,等.基于正弦曲线拟合法实现陀螺罗盘快速精寻北[J].中国惯性技术学报,2012,20(3):253-256.HAN Xin-jian,DENG Nian-mao,WANG Jian-zhao,et al.Algorithm for fast north-seeking of gyrocompass based on sine curve fitting[J].Journal of Chinese Inertial Technology,2012,20(3):253-256.
[8]Zhang Zhi-jun,Sun Ji-yu,Wu Ke-yong.Study on technology of orientation and north-finding based on fiber optic gyroscope[C]//International Conference on Mechatronics and Automation.2007:2252-2257.
[9]Celikel O.Application of the vector modulation method to the north finder capability gyroscope as a directional sensor [J].Measurement Science and Technology,2011,22(3):1-12.
[10]Ren Chun-hua,Pan Ying-jun,He Tong,Xiong Nin-xiang.Research and implementation of a new orientation &incline instrument used in oil and gas wells[C]//The Ninth International Conference on Electronic Measurement &Instruments.2009:1027-1030.
Seeking north method for fiber optic gyroscope north-seeker at all-attitude and unknown latitude
WANG Hai-ming1,LI Si-hai2
(1.Shaanxi Huayan Aero-instrument Co.,Ltd.,Hanzhong 723102,China;2.College of Automation,Northwestern Polytechnical University,Xi’an 710029,China)
The traditional fiber optic gyroscope north-seeker is based on 4-transposition,multi-transposition or rotating modulation and it needs to input the latitude when there is platform angle of pitch or roll.This requirement restricts the application of north-seeker in modern war.According to the characteristic of earth’s rate is constant and “suppositional” measure gyroscope in orthogonal coordinate system,the way is put forward to seek north without inputting latitude through rotate 3-transposition by using only a fiber optic gyroscope and an accelerometer.The way can also finish the high accuracy seeking north at all-attitude and unknown latitude,output the attitude angle and the latitude additionally.The prototype show that it can achieve 0.06° seeking north precision as use arandom walk fiber optic gyroscope and a 50 μgbias repeatability accelerometer.
fiber optic gyroscope;north-seeker;3-transposition;suppositional gyroscope;latitude;
U666.1
:A
1005-6734(2014)01-0063-04
10.13695/j.cnki.12-1222/o3.2014.01.013
2013-09-15;
:2013-12-11
总装航空支撑项目(61901060303)
王海明(1971—),男,高级工程师,从事定位定向和导航研究。E-mail:goodwhm@126.com