基于CFD不同AUV艇体阻力性能研究
2014-06-27,,,
,,,
(江苏科技大学 船舶与海洋工程学院,江苏 镇江 212003)
无人自治水下运载器(autonomous underwater vehicle,AUV)作为探索海洋、开发资源和军事作战等水下应用的重要手段,航速和续航力是评价其航行性能优劣的重要方面。增大航速和提高续航力的直接方法便是降低其在水下航行时所受到的阻力,AUV在水下航行时的阻力主要取决于几何形状及尺寸以及其附体的尺寸。文献[1]中选取细长体AUV裸船体,针对不同网格数量选取3种湍流模式k-ε,RNGk-ε,SSTk-ω进行了CFD阻力计算,将计算结果与在循环水槽进行实验得到实验值对比得到SST k-模式模拟误差最小;文献[2]针对AUV艉舵的设计问题利用CFD讨论了航速在2 m/s采用NACA翼型设计艉舵的水动力性能,AUV的附体包括深海摄像头,定深声呐,吊环以及通信天线,十字舵及固定装置,整流罩等。国内对不同AUV艇体形状的阻力和附体引起艇体阻力增加研究较少。
1 建立艇体几何模型
1.1 AUV主艇体设计
在深入研究AUTOSUB、HUGIN、REMUS、BLUEFIN形状几何特征基础上,选取不同的尺寸艇体作为研究对象,主艇体参数主要分为艇体总长度L(包括艏部长度Lf、中部长度Lm和艉部长度La)和艇体最大直径D,BLUEFIN根据艇体艏部不同分为流线型BLUFFIN1和钝型BLUFFIN2,见图1。具体主艇体的尺寸见表1。
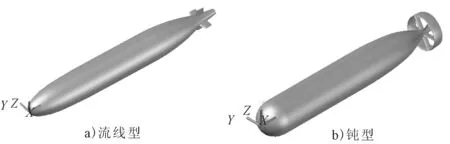
图1 带十字舵的AUTOSUB型和带整流罩的BLUEFIN1三维体几何图
1.2 艉部十字舵和整流罩的设计
艉舵翼型的厚度越大,对应的失速攻角越大,且能达到的最大升力系数也越大。文中选用NACA0012翼型的十字舵,该翼型失速时攻角已达到16°且能达到很高的升阻比,所以能在较小的阻力情况下得到较大的操纵力矩。
2)HUGIN艇体十字舵。剖面形状采用NACA0012翼型,其根部弦长为460 mm,翼端弦长为240 mm,半展长为380 mm(λ=1.086),导缘距AUV头部4 840 mm。
3)REMUS艇体十字舵。剖面形状采用NA-CA0012翼型,其根部弦长130 mm,翼端弦长为80 mm,半展长为140 mm(λ=1.33),导缘距AUV端部2 250 mm。
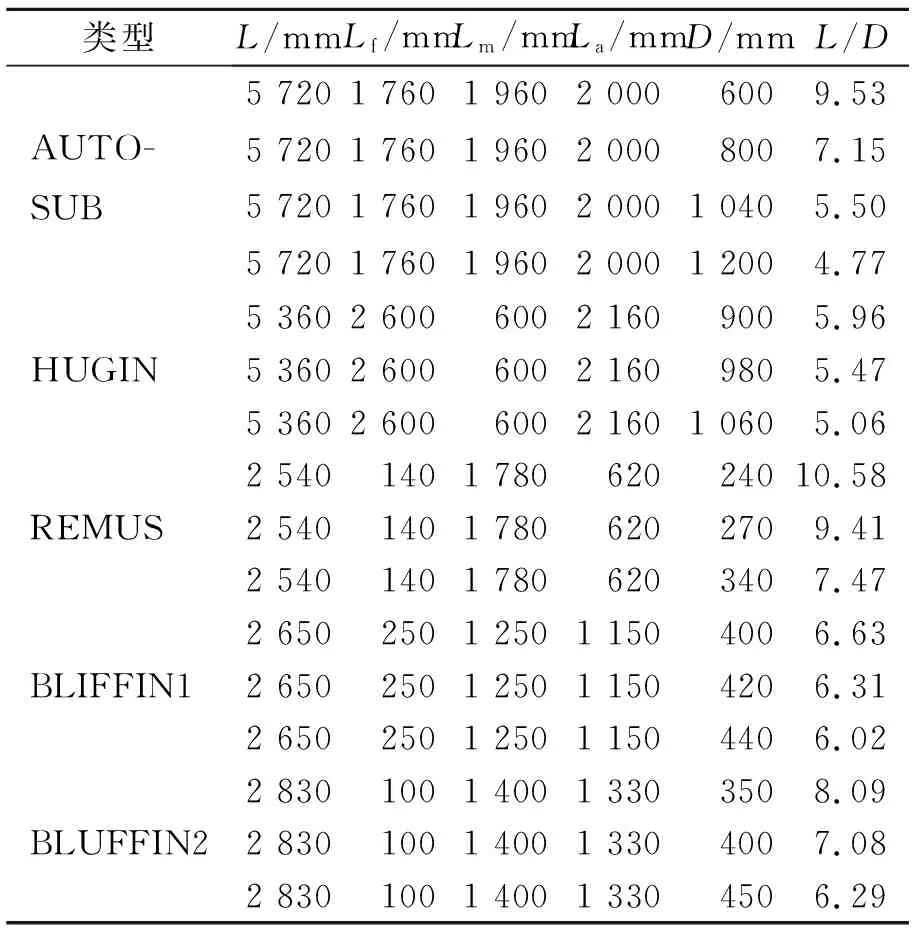
表1 不同艇体几何参数
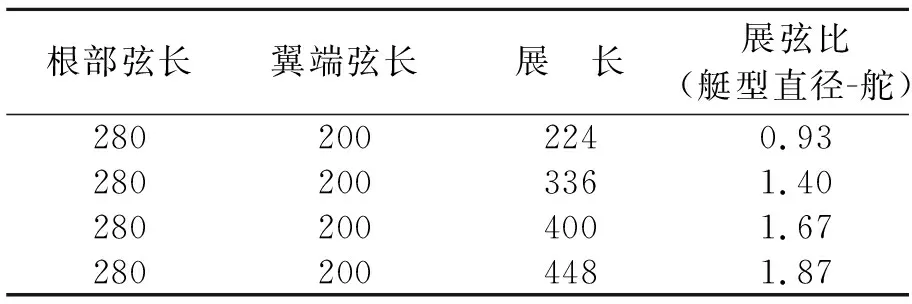
表2 AUTOSUB型十字舵的主要参数 mm
4)BLUEFIN艇体整流罩[4]。剖面形状采用NACA0012翼型,其宽度为150 mm,直径为420 mm,其起始端距AUV艉端150 mm。
2 AUV艇体CFD数值模拟和阻力性能分析
在工程允许的误差范围内,数值模拟与模型实验得到阻力数值相比精度相当,不仅耗费少而且可以获得舵对船体流场影响、整流罩对艇体艉流场影响等详细信息。
2.1 CFD数值模拟结果评判分析
在文献[1]中,通过对AUV建模,采用标准k-ε,RNGk-ε,SSTk-ω共3种湍流模式进行阻力数值计算,并且和实验数据对比可以验证SSTk-ω模式预测精度较高。由于AUV在水下一定深度自主航行,兴波阻力可以忽略不计,阻力主要分为由于水的粘性引起的摩擦阻力和由于艉流场漩涡引起的粘压阻力,根据相当平板假定和ITTC公式可以计算得到艇体摩擦阻力,与CFD计算得到的摩擦阻力对比修正[5]。
(1)
式中:Δerror——误差;
RfITTC——摩擦阻力公式计算值;
RfCFD——CFD计算的摩擦阻力。
1964年由群众出版社出版,是清朝末代皇帝爱新觉罗·溥仪在抚顺战犯看管所中所写的“反省式”自传,记录了他从登基到流亡到接受新中国“改造”的过程,是一部回忆录,更是一本特定历史环境下的自省书。
4种艇型对应3种湍流模式阻力计算误差见图2。
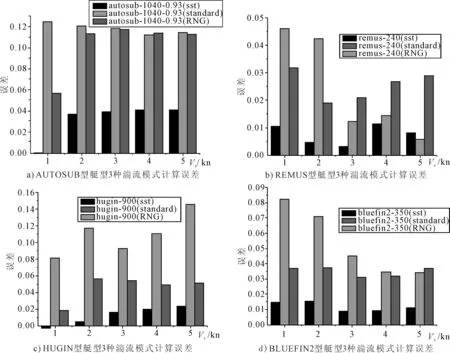
图2 4种艇型对应3种湍流模式阻力计算误差
采用SSTk-ω湍流模式数值模拟不同水下航行器阻力性能得到的摩擦阻力,与应用“相当平板”假定和ITTC公式所得摩擦阻力计算值误差基本上在5%以内,满足工程精度要求,摩擦阻力数值仿真预报达到了比较高的精度[6-7]。RNGk-ε模式和SSTk-ω模式效果较标准k-ε好,且SSTk-ω模式要比RNGk-ε模式更精确,标准k-ε模式相较于前两者,精度不是很高。在文献[1]中对比实验和CFD数值计算结果,SSTk-ω湍流模式适用于水下艇阻力计算,在后续阻力性能研究中均采用SSTk-ω湍流模式进行阻力数值模拟[8]。
2.2 AUV阻力性能分析
2.2.1 不同类型相似长径比裸船体阻力性能
1)如图3a),比较2种AUV艇型对应单位排水量总阻力,AUTOSUB大约是REMUS的30%~50%,阻力性能AUTOSUB艇型大于REMUS艇型;REMUS在低速时与AUTOSUB型单位排水量总阻力接近,但随着速度增加其单位排水量总阻力上升很快,因此REMUS更适合低速航行。
2)如图3b),2种AUV径长比(AUTOSUB为4.77,HUGIN 5.05)接近,比较两者的单位排水量的总阻力AUTOSUB的较小,艇型阻力性能AUTOSUB型大于HUGIN型。
3)如图3c),2种AUV径长比相等,阻力性能HUGIN型大于BLUEFIN2型。比较高速和低速时单位排水量总阻力,BLUEFIN2型阻力增长的幅度较大,BLUEFIN2一般适应于低速航行。
4)如图3d),2种艇型径长相近, 艇体最大直径相等,可以发现阻力性能BLUEFIN1型大于BLUEFIN2型。随着速度增加BLUEFIN2比BLUEFIN1单位排水量总阻力差别不大,在低速情况下,BLUEFIN钝型艏部和流线型阻力性能相差不大,后续研究可以围绕高速阻力性能进行。
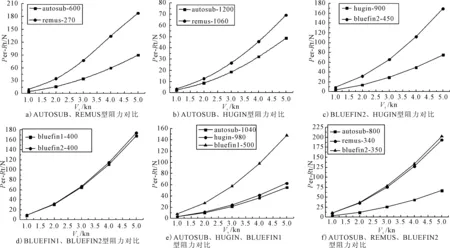
图3 相似径长比不同类型AUV单位排水量总阻力随航速变化曲线
5)如图3e),3种艇体的径长比(AUTOSUB 5.50, HUGIN 5.47, BLUFIN1 5.3)比较接近,通过比较不同航速下单位排水量的总阻力和粘压阻力,AUTOSUB型大于HUGIN型大于BLUEFIN1型;HUGIN型阻力性能与AUTOSUB相差不是很大;随着航速的增加BLUFFIN型阻力增加非常迅速,同样可以得出该型AUV只适合低速航行。
6)如图3f),3种艇型的径长比较接近(AUTOSUB 7.15,REMUS 7.4,BLUEFIN2 8.09),阻力性能AUTOSUB大于REMUS大于BLUEFIN,随着航速增加AUTOSUB单位排水量总阻力差别越来越明显。综合上述讨论研究,相似长径比1~5 kn航速情况下阻力性能优劣排序如下。
AUTOSUB大于REMUS大于BLUEFIN1等同于BLUEFIN2
AUTOSUB大于HUGIN大于BLUEFIN1等同于BLUEFIN2
AUTOSUB阻力性能最佳,相同径长比的HUGIN和BLUEGIN阻力性能比较需要后续研究[9]。
2.2.2 带十字舵艇体阻力性能比较分析
1)如图4,两种带舵AUV艇体径长比(AUTOSUB 5.50, HUGIN 5.47)和舵展弦比(AUTOSUB 0.93, HUGIN 1.086)都较接近,比较不同航速下阻力曲线,AUTOSUB单位排水量总阻力和粘压阻力都较HUGIN小,所以带十字舵的AUTOSUB型阻力性能也优于HUGIN型。在低速航行时(大约在1~2 kn)两者单位排水量总阻力相近,高速时AUTOSUB型具有更好的阻力性能。
2)随着艇体最大直径的增加,AUTOSUB型AUV带十字舵阻力增加的比例呈减小的趋势,由于受到艇体流场的影响,艇体直径较小时,十字舵一部分处在湍流场中一部分处在层流场中,而当艇体直径变大,十字舵全部浸入艉流湍流场,增加了对艉流场漩涡的干扰,减小了艇体的压差阻力。在艇体直径一定5 kn高航速情况下,展弦比为1.87的AUV带十字舵阻力增加比例较其他展弦比阻力增加比例大,且小展弦比工况下阻力增加值比例呈现交替的现象。展弦比为0.93的AUV艇体阻力增加比例范围在8%~12%之间,随着直径的增大也曾减小趋势,且在小直径情况下随航速变化较稳定,但是在直径为1 200 mm的AUV在航速为1~3 kn时有比较大的波动[10]。见图5。
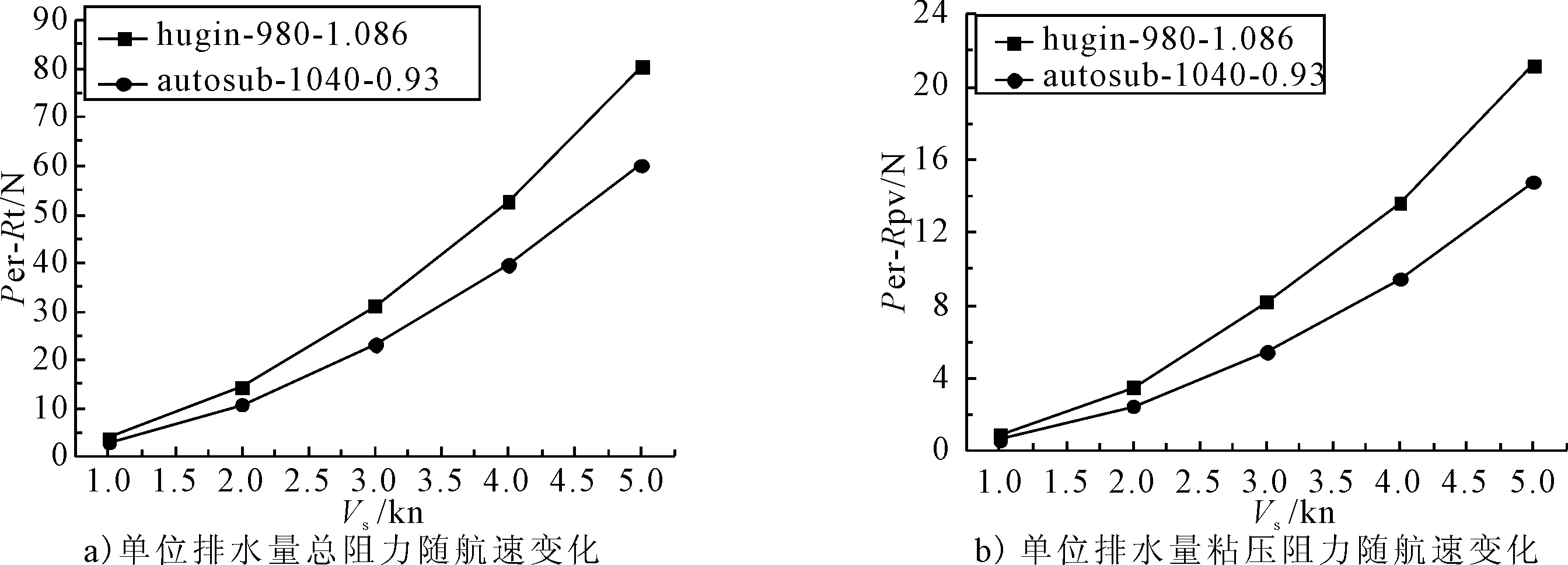
图4 带十字舵AUTOSUB型和HUGIN型单位排水量总阻力和粘压阻力随航速变化示意
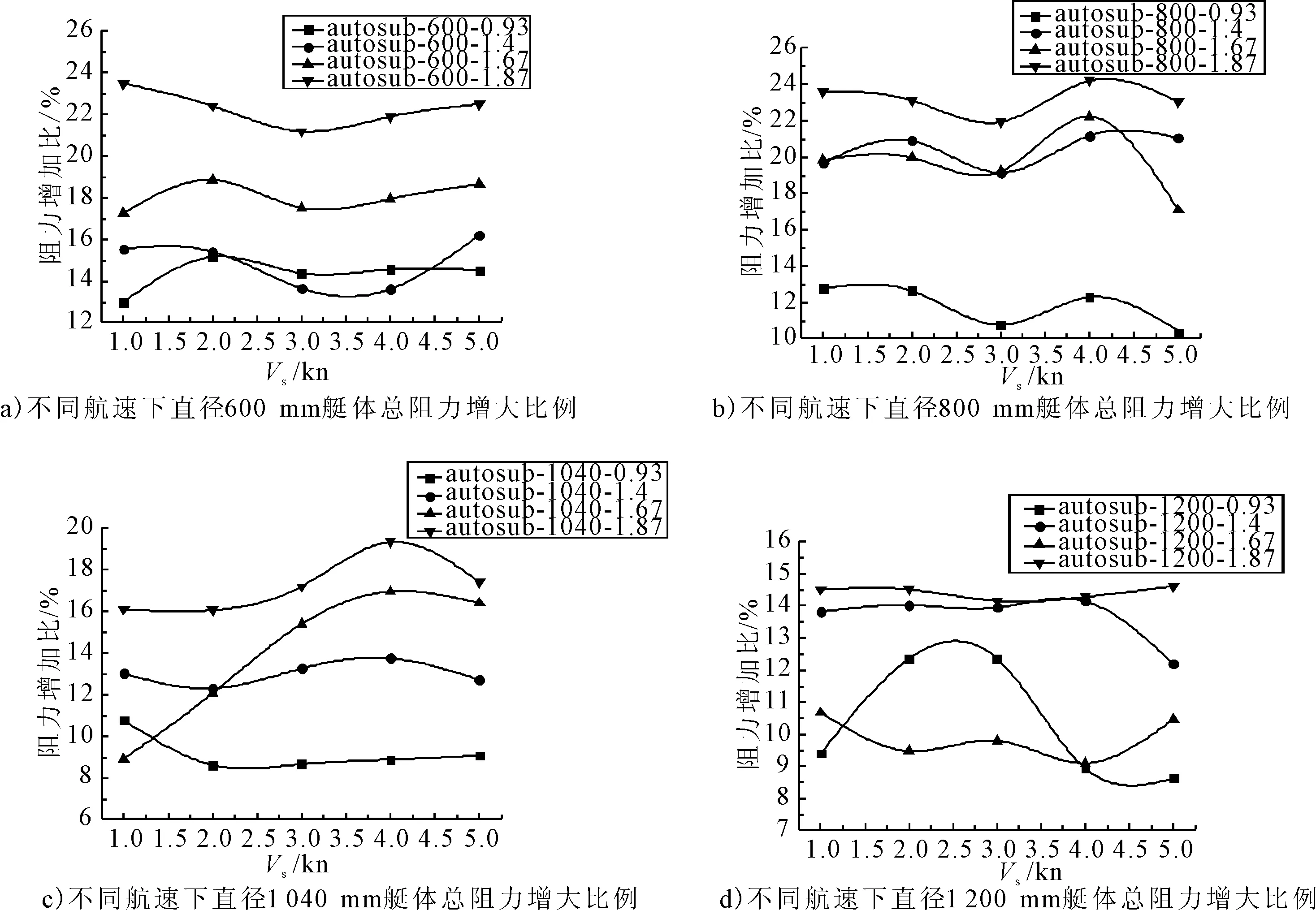
图5 AUTOSUB型不同直径不同舵展弦比较无舵时总阻力增大比例
2.2.3 带整流罩和无整流罩的BLUEFIN型AUV阻力性能比较
如图6,带整流罩BLUFIN2艇体最大直径(450 mm)和整流罩直径(420 mm)相当,单位排水量粘压阻力比无整流罩艇体增加比例随航速增大而增大直至趋于稳定,单位排水量摩擦阻力比无整流罩艇体增加比例随航速增加而逐渐减小趋于稳定,比较表3和图7,随着航速的增加带整流罩的BLUFIN艇体比无整流罩的艇体总阻力差值逐渐增加,BLUEFIN1和BLUEFIN2的阻力性能相近,流线型BLUEFIN比钝性BLUEFIN阻力性能在无整流罩情况下比带整流罩艇体阻力稍小些,但优势不是很明显,流线型BLUEFIN阻力增加随航速变化较大,而钝性BLUEFIN阻力增加几乎不受航速的影响。

表3 不同航速下有无整流罩BLUEFIN型总阻力增加比例
注:zlz为整流罩

图6 带整流罩BLUEFIN2 摩擦阻力和粘压阻力增加比例随航速变化示意
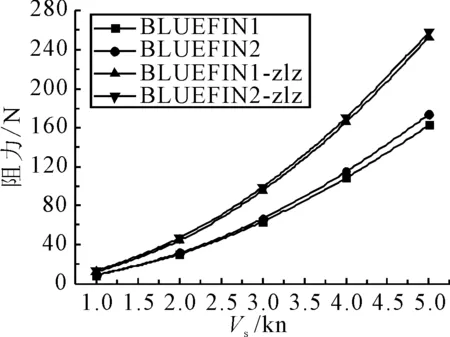
图7 有无整流罩的流线型和钝性BLUEFIN总阻力随航速变化
3 结论
通过对5种典型艇体的阻力研究,得到不同艇体在不同航速下的阻力特性和十字舵和整流罩对艇体阻力性能影响,对AUV艇体型线设计和快速性设计有很好的参考意义,降低艇体总阻力需要对十字舵展弦比和在艇体表面位置以及整流罩直径进行优化,考虑到实际艇体表面有声呐、吊环等附体,所引起的附体阻力相对于主艇体阻力虽然比较小,但需要对艇体总阻力进行修正。主艇体型线设计是AUV设计中至关重要的部分,直接影响艇体内部设备的总体布置,后续工作可以研究不同剖面形状在获得较大舱容前提下减小阻力以提高艇体航行性能。
[1] 于宪钊,苏玉民,王兆立,等.微小型水下机器人阻力性能的数值模拟[C]∥2008年船舶水动力学学术会议暨中国船舶学术界进入ITTC30周年纪念会论文集.2008:126-130.
[2] 武建国,张宏伟.小型自主水下航行器艉舵设计与研 究[J].海洋技术,2009,28(3):5-8.
[3] 胡 坤,徐亦凡,王树宗,等.潜艇X舵发展概况及其操纵控制特性分析[J].中国造船,2007,48(2):130-136.
[4] 孙 丽,刘贵杰,王 猛,等.AUV导流罩外流场数值仿真与几何参数优化[J].计算机仿真,2011,28(5):188-192.
[5] 何漫丽.水下自航行器水动力学特性数值计算与试验研究[D].天津:天津大学,2005.
[6] GAO Fudong,PAN Cunyun,HAN Yanyan,et al.Numerical computation and analysis of unsteady viscous flow around autonomous underwater vehicle with propellers based on sliding mesh[J].中南大学学报:英文版,2012,19(4):944-952.
[7] SHEN Hailong,DU Mo,SU Yumin,et al.Study of microminiature autonomous underwater vehicle hull form based on CFD technique[C]∥Renewable and Sustainable Energy II. Part 1.2012:2651-2654.
[8] SONG Fangxi,ZHANG Lianhong,WU Zhiliang,et al.On resistance calculation for autonomous underwater vehicles[C]∥Manufacturing Process Technology.2011:1740-1743.
[9] ZHAO Jinxin,SU Yumin,JU Lei,et al.Hydrodynamic performance calculation and motion simulation of an AUV with appendages[C]∥2011 International Conference on Electronic and Mechanical Engineering and Information Technology. v.2.2011:657-660.
[10] ZHANG Xu,CHEN Tao,LI Liwei,et al.Dynamics simulation study on transmission mechanism of cross rudder for sightseeing mini-Submarine[C]∥Computer-Aided Design, Manufacturing, Modeling and Simulation. Part.2.2011:684-687