AUV水声跳频通信调制解调器的设计与实现
2014-06-24范巍巍张殿伦董继刚张友文
范巍巍,张殿伦,董继刚,张友文
(哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001)
AUV水声跳频通信调制解调器的设计与实现
范巍巍,张殿伦,董继刚,张友文
(哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001)
在复杂时变水声通信环境中非相干FH-FSK调制解调技术是一种较为稳健、可靠的通信方式,适合于低速、高可靠的水声设备遥控等应用场合,如水面船遥控高速运动的水下智能机器人(autonomous underwater vehicle,AUV)。但也面临着以下困难:1)高速运动带来的多普勒会严重恶化通信系统性能;2)为节省能耗,AUV依据通信需求可对通信单元进行经常性的上电与断电操作,导致异步单工工作模式下水面与水下通信节点之间很难协调工作。针对以上问题,提出了采用脉冲对技术进行可靠多普勒估计,并采用线性插值技术进行高效多普勒补偿;结合通信节点板载高精度时钟以及设计的声链路同步机制有效地解决了AUV和水面控制船之间的双向链路建立与数据传输工作。基于OMAP-L138双核处理器平台设计与实现了FH-FSK的水声调制解调器的样机,湖上实验结果表明提出的传输控制协议可保证通信节点之间的通信链路随机建立和断开,结果证明所设计的样机稳定、可靠。
非相干调制;脉冲对;多普勒估计;线性插值;双向链路;声链路同步;FH-FSK;水声通信;跳频
水声信道是迄今为止难度最大的无线通信信道之一。如何克服多途干扰、时频和多普勒扩展、时变衰落,是水声通信技术中需要重点解决的问题[1]。水声通信在海洋环境监测,水下无人潜器的数据传输、遥控,水下中继通信等场合有着广泛应用。组成水声通信网节点的水声调制解调器是其中的关键。水声通信调制方式主要分为非相干调制和相干调制,由于非相干调制在时变空变水声信道有较好的适应性,最初的水声通信机大都采用非相干调制,上世纪90年代Milica提出的判决反馈均衡器加二阶数字锁相环应用于非相干调制[2],相干调制的水声通信机陆续被研制出来,但相干调制因受制于信道条件大都应用于信道条件良好的深水垂直信道或近距离信道。所以在可靠通信的应用场合非相干调制的通信体制仍占主流。
国内外有许多科研单位从事水声调制解调器的研制,较有名的是美国Woods Hole Oceanographic Institution开发的Micro-Modem,采用低速率的FHFSK和高速可调速PSK调制,同时结合高精度时钟可应用于定位导航,是一款集通信、定位的多用途Modem[3]。美国的Benthos公司的RS系列产品更是将释放功能结合于水声Modem,其也采用了FSK和PSK多种调制方式[4]。可以说低速和高速多种调制结合定位释放功能于一体是国外水声调制解调器的特点。
国内科研单位如朱维庆[5]、申晓红[6]、许肖梅[7]、殷敬伟[8]等都在水声领域有广泛研究,其中朱维庆为“蛟龙”号研制的水声通信机实现了世界上首次7 000 m深度上潜器与母船间的图像、语音、数据和文字的水声通信传输。其通信系统既有低速的扩频/跳频通信,又有高速的PSK调制的通信系统,是一套综合性的通信系统。限于技术水平和国内市场狭小,国内并不像国外有成熟商业产品。
在通信节点之间保持时间同步有助于解决通信冲突问题,同步是靠估计和调整通信节点内部时钟的固定偏差来实现[9],在水声信道中通过声信号测时延来同步的困难是多途的影响及节点间运动带来的测距误差。本文采用了3次握手的方式,2个通信节点间各自测得节点间斜距,多普勒速度,参考时钟节点将斜距和多普勒速度通过声通信方式传递给被同步节点,由被同步节点计算运动造成的斜距变化,从而调整本地时钟和参考节点时钟对齐。本文介绍了采用FH-FSK调制方式的半双工调制解调器的设计,包括系统设计、软硬件设计、算法仿真及湖试,湖上实验结果表明系统符合设计要求。
1 AUV通信系统设计
1.1 总体设计
AUV(autonomous underwater vehicle)其体积带来的灵活性在海洋开发和军事上有广泛的应用,采用声通信的方式使得AUV摆脱电缆的束缚可与母船时刻进行信息的交互,由于运动带来的多普勒干扰,在AUV声通信机设计中采用非相干调频调制,为避免水上节点与水下节点同时发射产生的冲突,采用水上和水下同步方式工作的模式,通过声链路交互,使得水下节点时钟和水面节点对齐。当同步建立后,2节点间按设计的协议进行数据交互。图1所示为AUV通信机的工作示意图。
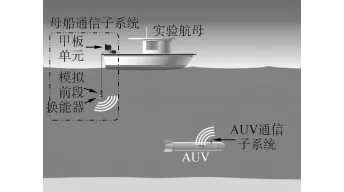
图1 AUV通信机系统工作示意图Fig.1 AUV communication system working diagram
1.2 设计方案
1.2.1 物理层
物理层采用跳频调制方式,设系统有N个调频点,S1(t)为发送的跳频信号,跳频调制的数学模型:

式中:Δw为调频的频率间隔,m(t)为待传输数字信息,ψn为初始相位。通过采用躲避干扰的方式来抗多途干扰。本系统工作频带9~15 kHz,FH-2FSK调制,通信速率可调(40/80/160 bit/s),信道编码采用1/2卷积码,接收端使用Viterbi软译码。图2为物理层帧格式。为保持接收信号幅度的稳定,在建立同步后,节点依据测得的斜距和声纳方程实时调整模拟接收板的放大增益,使得AD前段输入信号保持1 V左右。通信节点间的帧格式如图2所示,其中LFM用于帧同步,脉冲对用于测速,FH-2FSK跳频速率可变,跳频序列为RS码序列[10]。

图2 通信机帧格式Fig.2 Communication modem frame format
通过采用“脉冲对”估计出宽带信号载波频率处的多普勒频偏大小,多普勒因子Δ即为频偏与载波频率的比值。此脉冲对为2个连续的重复的符号,在发送时域数据信号x(k)时,复域通频带等效信号为

式中:ftx为发送载波频率。在接收端,忽略噪声的情况下,复域基带信号为

式中:frx为接收载波频率,ε=NfΔTs=N(ftx-frx)Ts为归一化载波频率偏差。定义2个连续重复之间的延时为D个采样点,符号的长度为L,定义中间变量:
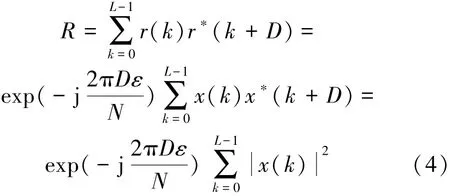
从而得到归一化载波频率偏差的估计值为
频偏估计范围为

对接收信号进行多普勒补偿等效于对接收信号的重采样,但在多普勒频移较小,精度要求很高的情况下,改变采样率比较困难。文中采用线性插值法来实现多普勒补偿。实际上,采样频率的增大或减小也等效于固定时间内采样点的增多或减少,采用插值法进行多普勒补偿有2个参数要确定:新的采样点的位置及其采样值。插值法是用估计的相对多普勒频移Δ确定出新的采样点的位置,然后用其相邻的2个已知采样样本进行线性插值计算出新的采样值,多普勒估计与补偿结构如图3所示。所得的新样本组成的信号就是消除频移后的信号。
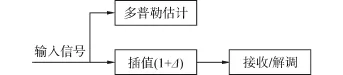
图3 多普勒估计与补偿结构Fig.3 Doppler estimation and compensation structure
1.2.2 数据链路层
由于水声信道声波传播速度慢带来的节点间信号碰撞问题,这里设计了一个链路层协议来使得母船和AUV之间的通信有序进行。系统采用声链路同步方式建立节点间时间同步,然后开始声通信。
首先水面节点依据本地时钟周期性的发送声链路同步指令给水下节点,水下节点在收到指令后延时固定时间应答水面指令,同时记录脉冲对测得的多普勒速度v1,水面节点收到应答后可测得节点间时延t2和多普勒速度v2,然后将t2和v2传送给水下,水下节点对收到水面的应答后可测得时延t3和v3。水下节点将获得的2个时延做差,若差小于门限,则认为测距可靠,通过获得的多普勒速度v1、v2、v3补偿运动带来的斜距变化,调整同步时钟与水面同步时钟对齐。声链路同步建立时序如图4所示。
系统同步建立后,如图5所示,水面节点按时钟节拍周期性向水下节点发射询问/配置信号,水面根据信道冲击响应扩展长度,向水下配置节点间通信速率,若水下开机且已建立同步链路,水下节点根据收到的配置速率发射用户数据,若水下节点内没有可发送的数据,则水下节点不做回应。
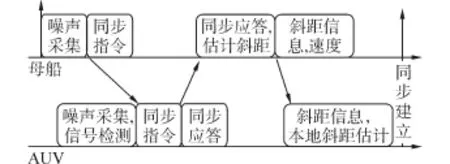
图4 声链路同步建立时序Fig.4 Acoustic link establishment of timing synchronization
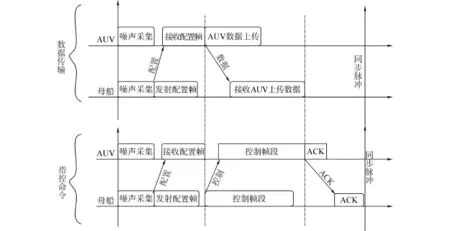
图5 同步建立后传输时序Fig.5 The transfer after timing synchronization is established
水面节点作为控制端,其优先级高于水下节点,当水面节点有指令数据时,指令数据跟随配置帧向水下发送,水下节点优先处理水面指令,水下节点对水面指令进行解调校验,根据校验结果回复ACK/NACK,水面节点若收到NACK,需重传指令帧。
采用这种传输协议使得水面水下节点可随机建立或断开链路。当水下节点关机时,水面节点按时钟周期发送问询指令,因水下关机而无应答。当水下开机后,水下节点处于监听状态,当接收到问询信号后开始进行声同步。当水面关机后,水下节点在若干次周期内没有检测到水面配置帧(由于水面关机或信道恶化),则认为通信链路已断开,水下节点转为监听模式,等待新的同步指令。水面节点也可在同步建立后发送重新同步指令发起新的同步过程。
1.2.3 用户层
用户串口采用NMEA0183格式,指令和数据按格式形成数据帧,数据帧格式如表1所示。
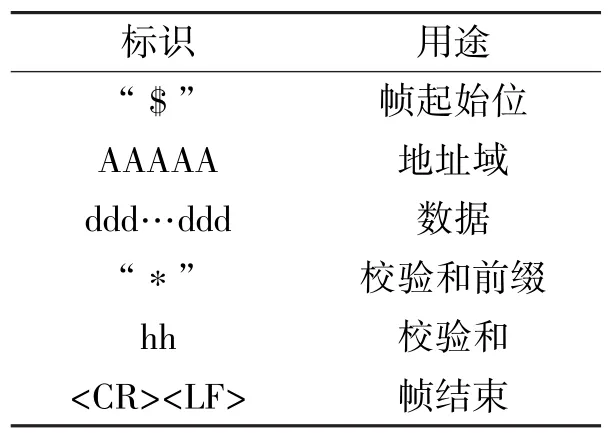
表1 用户数据帧参数Table 1 Frame parameters
用户使用“$SCDLM”地址域标示水面至水下方向通讯信息,“$SCULM”地址域标示水下至水面方向通讯信息,“$SCSYNC”用于水面控制水下节点的声链路同步指令。
1.2.4 信号处理平台
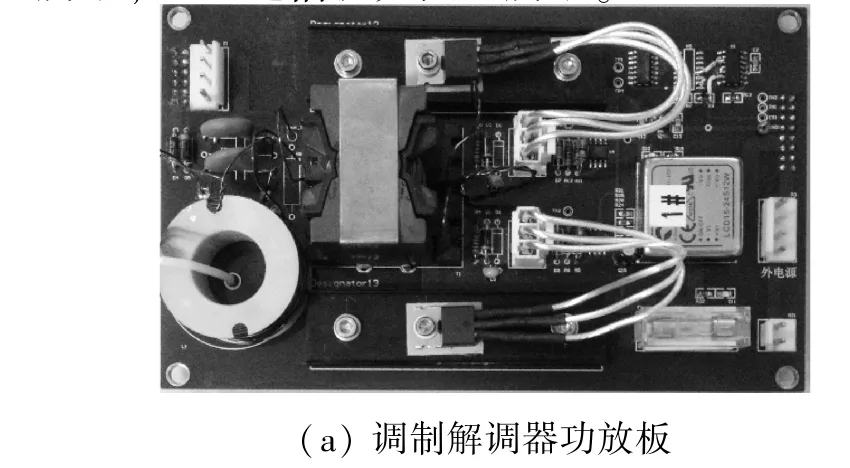
FH-FSK调制解调器采用美国德州仪器公司低功耗双核(ARM+DSP)浮点数字处理器OMAPL138[11],模拟输入端采用16bit A/D转换,8 bit D/A控制模拟输入电路放大增益,板载高精度时钟用于精确对时。处理器的通用输入输出管脚用于驱动D类功放发射通信信号,板载32G SD卡用于存储数据便于后置分析处理。对外I/O接口有网口和串口。网口用于大数据量传输,串口用于连接用户端。FH-FSK调制解调器功放板和数字信号处理板如图6所示,AUV通信机如图7所示。
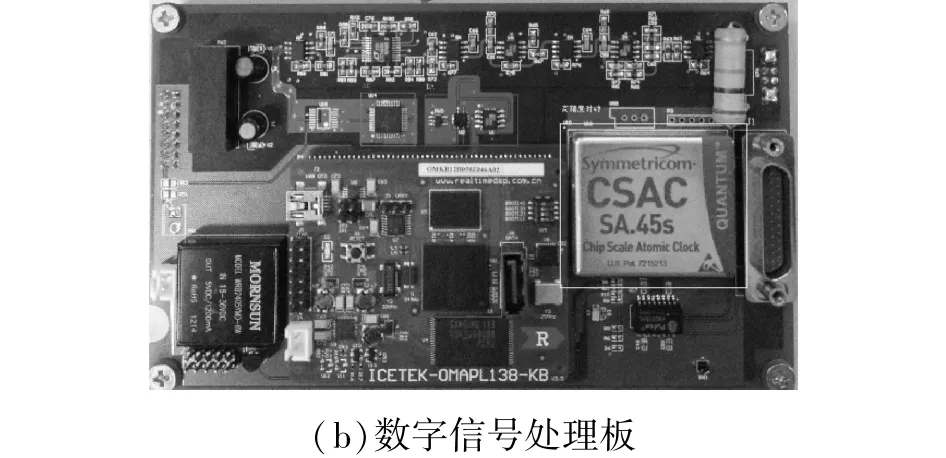
图6 FH-FSK调制解调器功放板和数字信号处理板Fig.6 FH-FSK modem amplifier board and digital signal processing board

图7 AUV通信机Fig.7 AUV communication modem
2 系统性能仿真分析
通信节点间的帧格式如图2所示,其中40 ms长度的LFM用于帧同步,30 ms脉冲对用于测速,最大可测多普勒速度为5 kn,FH-2FSK跳频速率可变,跳频序列为RS码序列,信道编码采用码率为1/2的卷积码(753,561),译码算法采用Viterbi软译码。通信机数据帧时域波形如图8所示。
帧同步检测采用匹配滤波器,对接收信号与本地LFM信号进行相关包络检测,检测门限根据对噪声信号匹配后的包络均值乘以固定系数来确定。
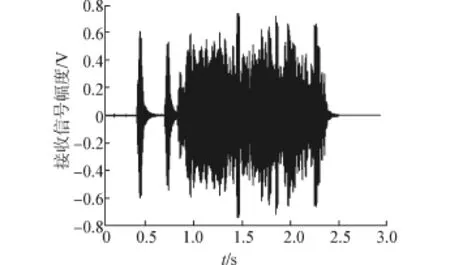
图8 通信机数据帧时域波形Fig.8 Modem time-domain waveform data frame
图9 所示为LFM信号经过匹配相关器后的包络,其中采样率为48 kHz,虚线是检测门限,高于噪声包络均值23 dB,三角图案是搜峰程序搜索到的3个相关峰,分别是直达峰、最大峰和最后峰。非相干解调是按能量积分,所以选用最大峰峰值位置作为帧同步信号LFM的脉冲后延时刻。
在检测时间窗内检测到同步后,脉冲对估计节点间相对速度,然后采用线性插值算法对跳频信号进行频率补偿,最后经过非相干正交接收机对接收信号频点能量积分比较解调出符号软判决信息,如图10所示,并将判决符号给译码器译码及CRC校验。
图11所示为3种通信速率误码率曲线,可知在高斯白噪声下,在9~15 kHz频带内,通信速率分别为40/80/160 bit/s下,卷积码编译码,跳频通信在负信噪比下性能良好,这就需要帧同步的检测能力与跳频符号的抗噪声能力相匹配,即同步检测器能在负信噪比下检测帧同步信号。
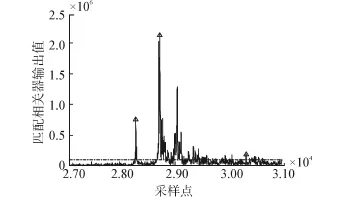
图9 LFM信号匹配相关器输出后的包络Fig.9 LFM signal envelope after matching correlator
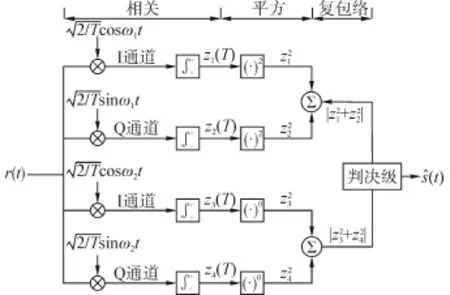
图10 非相干正交接收机框图Fig.10 Non-coherent quadrature receiver block
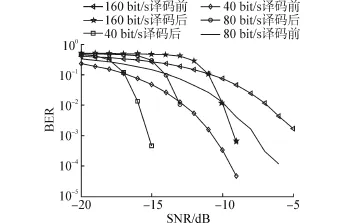
图11 FH-2FSK系统差错性能Fig.11 FH-2FSK system error performance
3 湖试结果
设备样机于2013年7月在吉林省松花湖进行了性能及功能实验,水下节点锚系于湖底,水面节点在湖面机动航行,实验测试了声链路同步功能和双向链路通信功能。图12给出了湖试时的布放示意图,图13为声速剖面图。湖试所用工作频带为9~15 kHz,发射声源级185 dB,接收换能器灵敏度-185 dB,水下节点离底3 m,水面节点深度为3.5 m。
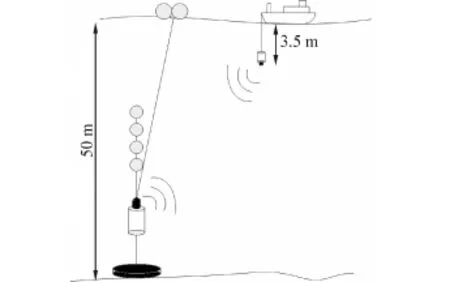
图12 湖试布放示意图Fig.12 The schematic of lake test laying
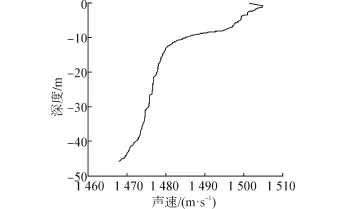
图13 松花湖7月声速剖面Fig.13 The sound speed profile of Songhua lake in July
3.1 声链路同步实验
声链路同步试验测试系统的声链路同步功能,母船行进路线如图14所示,母船每2 min发送重新同步指令给水下节点,水下节点位于轨迹图(0,0)点。图15(a)所示为实验后由SD卡内存储的斜距信息。第0~60帧对应于图14(a)运行轨迹,第61~82帧对应于图14(b)运行轨迹。在30~40帧,同步链路建立不成功,摘取记录的原始数据分析,在1.2 km斜距以上,水下节点回复的同步应答信号在母船接收端信噪比处于负值,水面检测门限系数相对于噪声设置为26 dB,即输入信噪比3 dB以上可检(匹配滤波器增益23 dB)。但在这个斜距上,理想条件下输入信噪比应为正信噪比,考虑松花湖在这个季节的声速梯度在整个深度上随深度增加而减小,水下节点布放过深,能量衰减并不是按照20lg(r)衰减。图15(b)所示为61~82帧的时延测时误差,分别给出了未补偿多普勒速度和补偿多普勒速度后的测时误差,补偿后误差从10 ms减小到3 ms左右。
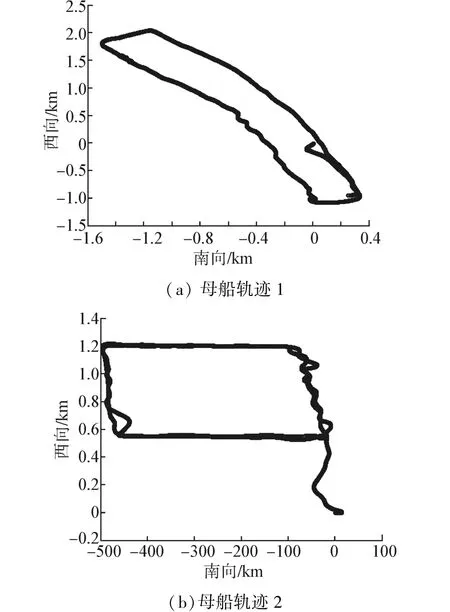
图14 同步实验母船运动轨迹Fig.14 The mother ship trajectory of synchronization experiment
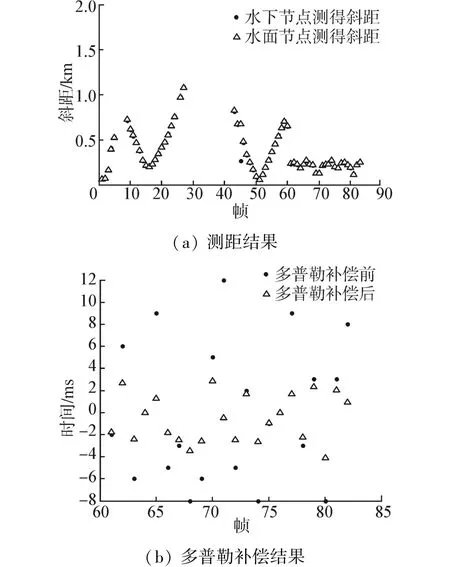
图15 声同步测距结果比较Fig.15 Comparison of ranging sound synchronization
3.2 双向链路通信实验
双向链路实验测试了系统的全部功能,在设备下水和中途进行了3次同步,水下节点上电后发送50 Bytes/min的数据包给母船,母船随机发送25 Bytes数据给水下节点。图16为母船行走轨迹,剔除95~99帧未检测到信号,整个过程无误码,无丢包。
图17(a)为水下节点根据水面配置帧测得的斜距,图17(b)为匹配滤波器输出信噪比和依据声纳方程计算得到的理论匹配滤波器输出信噪比的比较,从图中可知当斜距大1 km,实际输出信噪比比理论小10 dB左右,这是由于水面节点向下发射的声信号在松花湖的负梯度声速的因素下导致的声线未能全部到达湖底。图17(c)为实验过程中模拟接收板放大增益的控制曲线,随着斜距的变大,增益逐渐变大,在95~99帧由于船速加快,噪声变大未检测到信号,增益复位为50dB,随后帧的噪声减小,增益控制恢复正常工作。图17(d)为20~30帧的译码前误码率曲线比较,通过线性插值补偿多普勒的影响后,误码率较明显降低。
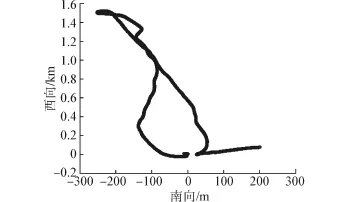
图16 双向链路实验母船运动轨迹Fig.16 The mother ship trajectory of bidirectional link experiment
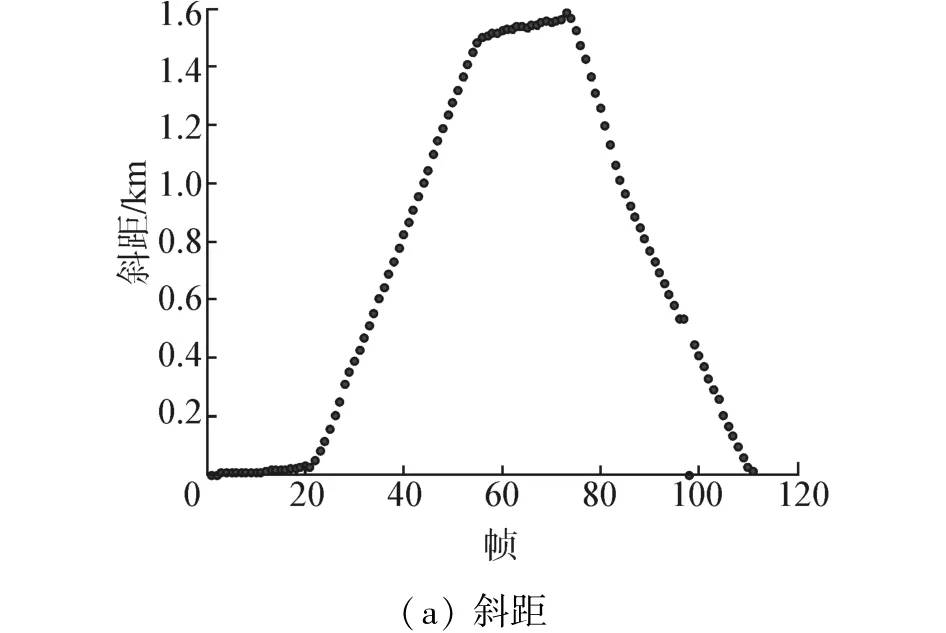
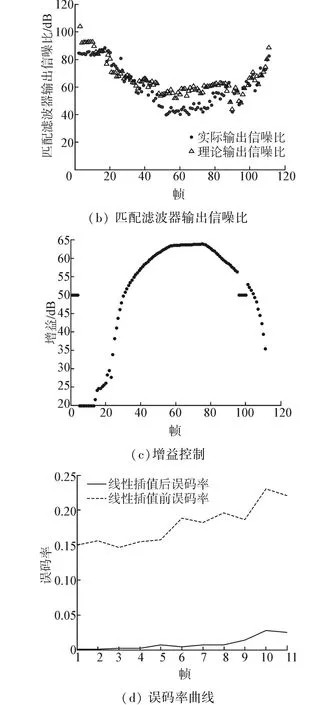
图17 双向链路实验水下节点数据记录Fig.17 Data record of underwater two-way link node
4 结束语
FH-FSK水声通信机适合应用于多途信道下对AUV遥控,小数据量双向传输场合。AUV可在不需要通信时关闭通信机,节省电池消耗。利用高精度时钟通过采用一种有效的声链路同步逻辑,使得处于随机上电与下电状态下的AUV通信节点与水面母船之间时钟同步。基于OMAP-L138双核处理器平台实现一套通信样机,湖试结果证明该样机稳定、可靠。非相干通信基于能量的检测算法简单、可靠,保证了通信机的实用性。在湖试中也发现了为适应松花湖信道环境需降低检测门限以达到更远的通信距离,但带来的缺点是LFM匹配相关检测抗冲击噪声弱,易发生虚警,可考虑增加LFM个数来增加同步检测条件降低虚警。
[1]许肖梅.水声通信与水声网络的发展与应用[J].声学技术,2009,28(6):811-816.XU Xiaomei.Development and applications of underwater acoustic comnmnication and networks[J].Technical Acoustics,2009,28(6):811-816.
[2]STOJANOVIC M,CATIPOVIC J A,PROAKIS J G.Phasecoherent digital communications for underwater acoustic channels[J].IEEE Journal of Oceanic Engineering,1994,19(1):100-111.
[3]FREITAG L,GRUND M,SINGH S,et al.The WHOI micro-modem:an acoustic communications navigation system for multiple platforms[J].MTS/IEEE Oceans,2005,2(1):1086-1092.
[4]GREEN M D,RICE J A.Channel-tolerant FH-MFSK acoustic signaling for undersea communications and networks[J].IEEE Journal of Oceanic Engineering,2000,25(1):28-39.
[5]朱维庆,朱敏,武岩波,等.载人潜器“蛟龙”号的水声通信信号处理[J].声学学报,2012,37(6):565-573.ZHU Weiqing,ZHU Min,WU Yanbo,et al.Signal processing in underwater acoustic communication system for manned deep submersible“Jiaolong”[J].Acta Acustica,2012,37(6):565-573.
[6]申晓红,王海燕,赵宝珍,等.基于混沌序列的水声跳频通信系统研究[J].西北工业大学学报,2006,24(2):180-184.SHEN Xiaohong,WANG Haiyan,ZHAO Baozhen,et al.A more secure underwater acoustic frequency-hopping communication system based on chaotic sequence[J].Journal of Northwestern Polytechnical University,2006,24(2):180-184.
[7]许肖梅.浅海水声数据传输技术研究[D].厦门:厦门大学,2002:18-33.XU Xiaomei.Studies on data transmission techniques in shallow water acoustic channels[D].Xiamen:Xiamen University,2002:18-33.
[8]殷敬伟.多途信道中Pattern时延差编码水声通信研究[D].哈尔滨:哈尔滨工程大学,2007:72-120.YIN Jingwei.A study of pattern time delay shift coding communication in underwater acoustic multipath channel[D].Harbin:Harbin Engineering University,2007:72-120.
[9]SYED A,HEIDEMANN J.Time synchronization for high latency acoustic networks[C]//Proc IEEE Infocom.Barcelona,Spain,2006.
[10]MERSEREAU R M,SEAY T S.Multiple access frequency hopping patterns with low ambiguity[J].IEEE Transactions on Aerospace and Electronic Systems,1981,17(4):571-578.
[11]Texas Instruments Inc.OMAP-L138 low-power applications processor[EB/OL].[S.l.]:Texas Instruments Inc,2009.www.ti.com.
Design and implementation of AUV underwater acoustic frequency hopping communication modem
FAN Weiwei,ZHANG Dianlun,DONG Jigang,ZHANG Youwen
(College of Underwater Acoustic Engineering,Harbin Engineering University,Harbin 150001,China)
In the complex time-varying underwater acoustic channel,non-coherent FH-FSK modulation is a robust and reliable communication mode,and it is suitable for remote control of low-speed,highly reliable underwater communication applications,such as,in communication with high-speed AUV(autonomous underwater vehicle)remotely controlled by a ship.However,there are some difficulties with high-speed movement bringing serious deterioration of communication system performance.Therefore,to save the limited energy,AUV will carry out power-on and power-off operation based on communication requirements,leading to a difficult work for an asynchronous simplex operating mode between nodes of surface and underwater communication.This paper presents resolutions for the difficulties above.The methods used are dual-pulse technology for reliable Doppler estimation,linear interpolation method for high-efficiency Doppler compensation,and the use of combining high-precision clock onboard of communication nodes and the design of acoustic-link synchronization mechanism to effectively solve establishment of bidirectional communication link and data transmission between the AUV and surface control boat.Based on the OMAP-L138 dual-core processor platform,the FH-FSK prototype of underwater acoustic modem was designed and implemented.The lake-test results showed that the proposed transmission control protocol can guarantee random connection or disconnection of the communication link between the communication nodes,which proved that the prototype is stable and reliable.
non-coherent modulation;pulse pair;Doppler estimation;linear interpolation;bidirectional link;acoustic-link synchronization;FH-FSK;underwater acoustic communication;frequency hopping
10.3969/j.issn.1006-7043.201309055
http://www.cnki.net/kcms/detail/23.1390.U.20141204.1523.003.html
TN929.3
A
1006-7043(2014)12-1473-07
2013-09-15.网络出版时间:2014-12-04.
国家自然科学基金资助项目(50909029).
范巍巍(1986-),男,博士研究生;张殿伦(1967-),男,教授,博士生导师.
张殿伦,E-mail:zhangdianlun@hrbeu.edu.cn.