基于双绕组永磁容错电机双余度控制系统研究
2014-06-01黄义红郝振洋穆晓敬
黄义红,郝振洋,穆晓敬
(江苏省新能源发电与电能变换重点实验室,南京航空航天大学,江苏南京210016)
基于双绕组永磁容错电机双余度控制系统研究
黄义红,郝振洋,穆晓敬
(江苏省新能源发电与电能变换重点实验室,南京航空航天大学,江苏南京210016)
基于双绕组永磁容错电机,对双余度电机控制系统进行控制策略分析。建立了系统的MATLAB仿真模型,包括电机本体模型、SVPWM、三相全桥逆变器、转速PI控制器、电流PI控制器五部分。仿真表明,该双余度控制系统能够实现恒转速与恒转矩模态切换。实验表明,在恒转速模式下改变转矩转速不变,在恒转矩模态下改变转速转矩保持不变。仿真及实验结果表明当系统发生断路故障时进行余度切换控制,故障态的输出功率和转速不变,实现容错控制。
永磁容错电机;双余度控制;矢量控制;余度切换
1 引言
近年来,多电以及全电飞机的研究成为了航空领域的热点,这对飞机电力作动器提出了更高的要求,即具有容错能力[1,2]。
余度,在可靠性工程中定义为:使用一套以上的设备来完成给定的任务,即构成余度。余度技术是指通过为系统增加多重资源,包括硬件和软件的重复配置,实现对多重资源的合理管理,从而提高产品和系统可靠性的设计方法。余度系统中有多余度(双余度以上)和双余度之分,最常用的是双余度系统[3]。
传统的双余度控制系统实现容错的本质是通过备份的方式来完成的,即利用两套独立的电机绕组和驱动器来实现系统的容错控制,提高系统的可靠性。其逆变器采用双三相全桥拓扑,功率管数目少,故障率低。双余度电机控制系统具有原理简单、结构清晰、控制简单易行的优点,但是双余度控制系统的电机本体为传统的永磁同步电机,采用分布式绕组方式,相绕组之间存在物理接触,当电机控制系统发生短路故障时,由于电机没有磁隔离和热隔离能力,因此短路绕组产生的磁链和热量会耦合到另一套绕组中,从而降低电机的运行性能,甚至导致电机无法正常工作,因此,双余度电机控制系统不具备短路故障隔离能力[4-7]。
永磁容错采用集中式绕组方式,具有相与相之间的物理隔离、磁隔离、热隔离和电气隔离的特点,能够有效地抑制短路电流,具备故障隔离和容错特性[8,9],但是传统的容错电机控制系统采用单相H桥逆变器[10,11],需要较多的功率器件,增加了系统的驱动器的故障率,使得系统的可靠性降低。
根据传统的容错控制系统与双余度控制系统的优缺点,本文采用基于永磁容错电机的双余度控制技术,以补偿传统双余度系统和传统容错控制系统的不足之处。本文对永磁容错电机的双余度控制系统进行了原理分析、建模仿真和实验验证。
2 双绕组永磁容错电机的坐标变换及数学模型
双绕组永磁容错电机采用隔齿绕制的两套对称三相绕组,如图1所示,因此各相绕组之间无磁路耦合,即互感为零,这为实现具有容错能力的双余度电驱动系统提供了故障隔离功能。
2.1 坐标变换
为了简化和求解永磁容错电机的数学方程,运用坐标变换理论对永磁容错电机的基本方程进行变换,实现电机数学模型的解耦。矢量控制中使用的变换为Clarke变换和Park变换[12,13]。
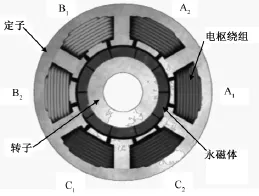
图1 双绕组永磁容错电机结构图Fig.1 Structure of fault-tolerant permanent magnet motor(FTPMM)with dual-winding
Clarke变换(abc-αβ)为:

Park变换(αβ-dq)为:

2.2 永磁容错电机的数学模型
假设:忽略铁心饱和,不计磁滞损耗和涡流损耗,并且相绕组感应电动势波形呈正弦波,忽略高次谐波[7,8]。根据上述的假设和坐标变换,得到永磁容错电机基于转子磁场dq0坐标系的数学模型。永磁容错电机在同步旋转坐标系下的电压方程为:

转矩方程和运动方程为:

式中,ud、uq为定子电压的dq分量;id、iq为定子电流的dq分量;ψd、ψq为转子磁链的dq分量;p为微分算子;np为电机极对数;R为电枢绕组电阻;ωs为转子电角速度;ω为转子机械角速度;Te为电磁转矩; TL为负载转矩;J为转动惯量。
3 双余度系统的容错控制方案
双绕组永磁容错电机采用两套三相逆变器进行控制,每套逆变器控制的电机绕组为星形连接,如图2所示。

图2 双绕组永磁容错电机的逆变拓扑Fig.2 Inverter of FTPMM
永磁容错电机的双余度控制系统框图如图3所示。该系统主要包括:两套DSP数字处理器、两套FPGA逻辑处理器、两套信号采集和调理单元、上位机、两套PWM驱动电路及主功率模块和双绕组永磁容错电机。

图3 永磁容错电机的双余度控制系统框图Fig.3 Dual-redundancy FTPMM control system
3.1 余度切换方案
该系统采用热备份的方式实现双余度控制。当系统正常工作时,余度1和余度2同时工作,此时两套控制器利用恒转速和恒转矩控制算法,结合绕组电流和电机转子位置信号,形成闭环系统(包括双闭环和单闭环系统),产生相应的PWM驱动信号,驱动电机工作,使每套余度各输出50%的功率,此时为双余度工作模式;当系统的某个余度发生故障时(包括功率管短路、断路故障和电机绕组短路、断路故障),以余度1故障为例,此时余度1利用故障检测单元先将PWM驱动信号进行封锁,将主功率模块1从母线上脱开,实现故障源的切除。通过逻辑处理单元将故障信号送到DSP1数字处理器中进行故障辨识,利用DSP1和DSP2之间的通信,将故障信号传递到DSP2中,改变余度2的控制状态,增加余度2的输出功率,使其输出100%的功率,保证输出功率和转速不变,此时为单余度工作模式,实现系统的容错控制。
3.2 矢量控制原理
矢量控制的思想为:在磁场定向坐标上,将电流矢量分解成两个互相垂直、彼此独立的矢量id(产生磁通的励磁电流分量)和iq(产生转矩的转矩电流分量),即控制id和iq便可以控制电机的转矩。本文基于id=0的矢量控制,实现铜耗最小,单位电流的输出转矩最大。
永磁容错电机的双余度控制系统的矢量结构图如图4所示,本文采用电流闭环(恒转矩控制)和转速闭环(恒转速控制)的双闭环系统。图4中:i*q和i*d为电流给定,Td为电磁转矩给定,ω*为转速给定。每套余度都包含空间电压矢量脉宽调制部分、三相全桥逆变器、电机三相绕组、转速传感器和电流传感器。

图4 双余度控制系统的矢量结构图Fig.4 Vector control of dual-redundancy system
当开关S3切换至开关S1位置时,系统工作在恒转速控制状态,通过电机转子轴上安装的旋转变压器检测转子位置,并将其转换成转速和电角度。给定转速与实际转速之间的偏差经过转速控制器计算得到定子电流交轴给定输入i*q。由电流霍尔传感器对绕组电流采样,提取的定子相电流经过3s/2r变换将它们转换到dq旋转坐标系中。将电流信号与给定信号i*q和i*d,比较经过电流PI控制器得到dq坐标下的电压ud、uq。该矢量通过SVPWM模块可输出PWM信号,驱动电机工作;当开关S3切换至开关S2位置时,系统工作在恒转矩控制状态,此时直接给定电磁转矩,给定电流i*q为电流/力矩比例输出,实现力矩控制。
4 仿真验证
在Matlab/Simulink环境中建立仿真模型,验证双余度控制系统能够进行恒转矩模态与恒转速模态切换以及在恒转速模态下实现余度切换。整个控制系统包括三相全桥逆变模块、SVPWM模块、转速PI控制器、电流PI控制器和电机模型五个部分。
仿真参数设置如下:给定转速n*=5000rpm;直流母线电压Udc=270V;恒转速模态下给定转矩T*=20 N·m;恒转矩模态下给定转矩模态 T*=25 N·m;切换发生时间0.015s。
双余度控制系统恒转速模态切换至恒转矩模态的仿真波形如图5所示,在进行切换之前,系统工作于恒转速控制模态,每套余度的绕组电流为26A,转矩稳定在给定的20N·m,转速稳定在给定的5000r/ min;进行模态切换后,为恒转矩控制模态,各相电流略有所增大,转速上升至6000r/min后保持稳定,转矩稳定在给定值25N·m后又降至20N·m,这是由于直流母线的限制,转矩无法跟踪给定。
系统余度切换时的仿真波形如图6所示,在发生故障前,系统为双余度工作模态,输出转速为5000rpm,转矩稳定在20N·m,每套余度各自承担50%的功率,每相电流峰值为26A;当余度一发生故障后,将余度一从系统中切除,余度二承担100%的功率,相电流峰值为52A,转速为5000rpm,转矩为20N·m恒定。可以得出,当系统中某一余度发生故障时,系统仍能持续稳定运行,输出功率和转速不变,实现容错控制。

图5 恒转速模态切换至恒转矩模态仿真波形Fig.5 Simulation result of mode switching

图6 余度切换仿真波形Fig.6 Simulation result of redundant switching
5 实验验证
在仿真的基础上,利用实验室的一台双绕组永磁容错电机进行了实验验证。实验平台如图7所示。

图7 实验硬件平台Fig.7 Experiment platform
恒转速模态下的实验波形如图8所示,给定转速2000r/min,负载转矩TL从0升至5N·m。当负载转矩为1.5N·m时,相电流达到5.6A,当负载转矩增大至5N·m时,相电流为16.2A。由此可见,系统在恒转速模态下,当改变负载转矩时,转速保持不变,同时,相电流随着负载转矩的增大而增大。

图8 恒转速模态下加载实验波形Fig.8 Experiment result under constant speed mode
恒转矩模态下的力矩响应实验数据如图9所示。利用实验室一台异步机作拖动机,拖动机转速变化范围为-100~100r/min,给定转矩为3N·m。在电机转速发生变化时,力矩始终保持不变。当转速扰动由正变负或者由负变正时,电磁转矩有一0.5 N·m的转矩差,这是由于电机本身存在空载摩擦转矩。从图8中可以看出,电机正转或反转的脉动仅为0.03N·m,可以得出,电机工作在恒转矩模态。

图9 原动机输出转矩对负载转速干扰曲线图Fig.9 Output torque under varied load speed
断路故障态下的余度切换波形如图10所示,在44.1s时模拟余度一发生断路故障,给定转矩为1 N·m,给定转速为1500r/min。在断路故障之前,为双余度工作模态,每相绕组电流峰值均为4.9A,转矩稳定在给定的1N·m,转速稳定在给定的1500r/ min;当发生故障后,将余度一从系统中切除,余度二承担100%的功率,相电流为原来的2倍,峰值为9.8A,转速为1500rpm,转矩为1N·m恒定,故障态的输出功率与转速不变,与仿真结果一致。
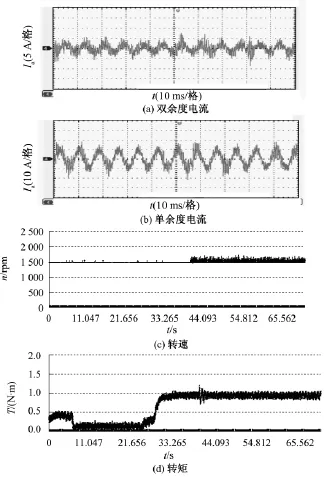
图10 余度切换实验波形Fig.10 Experiment result of redundant switching
6 结论
本文采用矢量控制策略,对基于双绕组永磁容错电机的双余度控制系统的模态切换控制和余度切换控制进行仿真分析。仿真结果验证了算法的正确性,能够实现恒转速模态与恒转矩模态切换。同时,搭建了实验验证平台,在恒转速模式下,改变电机负载转矩,绕组电流随之改变,电机转速仍能保持恒定;在恒转矩模式下,改变原动机(永磁容错电机)的转速,绕组电流随之改变,电机转矩保持恒定。仿真和实验结果表明,当系统发生断路故障时进行余度切换,故障态的输出功率和转速不变,实现容错控制。
[1]郝振洋,胡育文,黄文新 (Hao Zhenyang,Hu Yuwen,Huang Wenxin).电力作动器中永磁容错电机及其控制系统的发展 (Development of fault-tolerant permanent magnet machine and its control system in electro-mechanical actuator)[J].航空学报 (Acta Aeronautica&Astronautica Sinica),2011,29(1):65-74.
[2]于黎明 (Yu Liming).电飞机的技术改进及其发展状况 (Development of all-electric aircraft technology) [J].飞机设计 (Aircraft Design),1999,(3):1-4.
[3]郝振洋 (Hao Zhenyang).六相永磁容错电机及其控制系统的设计和研究 (Design and research of six phase fault tolerant permanent magnet motor and its control system)[D].南京:南京航空航天大学 (Nanjing:Nanjing University of Aeronautics and Astronautics),2010.
[4]刘卫国,马瑞卿 (Liu Weiguo,Ma Ruiqing).双余度无刷直流电机控制系统 (Research on dual-redundancy brushless DC motor control system)[J].电气技术(Electrical Technology),2006,(7):11-13.
[5]马瑞卿,刘卫国,杨永亮 (Ma Ruiqing,Liu Weiguo,Yang Yongliang).双余度无刷直流电动机的建模与余度控制技术 (Modeling and redundancy control of dualredundancy brushless DC motor)[J].微特电机 (Micro Motor),2008,(7):32-35.
[6]杨永亮 (Yang Yongliang).双余度无刷直流电机控制技术研究 (Study on control technology of dual redundancy brushless DC motor) [D].西安:西北工业大学(Xi’an:Northwestern Polytechnical University),2007.
(,cont.on p.74)(,cont.from p.40)
[7]罗战强,丁文,杨新团,等 (Luo Zhanqiang,Ding Wen,Yang Xintuan,et al.).双余度永磁无刷电机系统数学模型与特性分析 (Mathematical model and characteristics analysis of dual-redundancy permanent magnet brushless motor system)[J].电机与控制学报 (Electric Machines and Control),2013,17(5):20-27.
[8]Mecrow B C,Jack A G,Haylock J A.Fault tolerant permanent magnet machine drives[J].IEEE Proceeding E-lectrical Power Applications,1996,143(6):437-442.
[9]Wang J B,Atallah K,Howe D.Optimal torque control of fault-tolerant permanent brushless machines[J].IEEE Transactions on Magnetic,2003,39(5):2962-2964.
[10]余文涛 (Yu Wentao).永磁容错电机最优转矩控制策略的研究 (Research on optimal torque control strategy of fault tolerant permanent magnet machine) [D].南京:南京航空航天大学 (Nanjing:Nanjing University of Aeronautics and Astronautics),2010.
[11]沈天珉,胡育文,郝振洋 (Shen Tianmin,Hu Yuwen,Hao Zhenyang).基于电压调制的永磁容错电机转矩控制系统仿真 (Simulation of torque control fault tolerant permanent magnet machines based on voltage modulation) [J].微特电机 (Micro Motor),2011, (3): 66-72.
[12]蒋家强,曹建福 (Jiang Jiaqiang,Cao Jianfu).永磁同步电机矢量控制及其仿真研究 (Permanent magnet synchronous motor vector control and simulation) [J].电气开关 (Electric Switchgear),2011,(4):51-53.
[13]陈伯时 (Chen Boshi).电力拖动自动控制系统 (E-lectric drive control system)[M].北京:机械工业出版社 (Beijing:China Machine Press),2003.
Dual-redundancy fault tolerant permanent magnet motor control system
HUANG Yi-hong,HAO Zhen-yang,MU Xiao-jing
(Jiangsu Key Laboratory of New Energy Generation and Power Conversion(Nanjing University of Aeronautics and Astronautics),Nanjing 210016,China)
In this paper,compared with traditional fault-tolerant system and traditional redundancy system,a control strategy of dual redundant motor system applied in fault tolerant permanent magnet motor with dual-winding is analyzed.A fault-tolerant permanent magnet machine of centralized winding is introduced,which has the property of physical insulation,magnetic flux and fault insulation.And vector control is adapted in this system.The Matlab simulation model is established which contains the motor model,SVPWM,speed controller,three-phase full-bridge inverter and current controller.The simulation results reveal that the constant speed mode and constant torque mode can be switched in the dual-redundancy control system.Experiment results show that the speed is constant when the load torque changes under constant speed mode,and the torque is constant when the speed changes under constant torque mode.Both the simulation and experiment results show that fault-tolerance control of the system is achieved when open-circuit fault occurs while maintaining the power and speed unchanged.
fault-tolerant permanent magnet motor;dual-redundancy control;vector control;redundancy switching
TM351
A
1003-3076(2014)06-0036-05
2013-06-20
航空自然科学基金(2011ZC52039)、中国博士后基金资助项目(20110491408)
黄义红(1989-),女,江苏籍,硕士研究生,研究方向:电机及其控制;郝振洋(1981-),男,江苏籍,副教授,博士,研究方向:电力电子及电机控制。
