无线消防救援信息采集与监测系统
2014-06-01王庆辉魏立峰封岸松
王庆辉 金 烨 魏立峰 封岸松
(沈阳化工大学信息工程学院,辽宁 沈阳 110142)
0 引言
目前,消防设备的电子化和信息化已经成为趋势[1-4],但国内的正压式呼吸器的系统还都是机械结构,消防员难以逃脱信息孤岛的局面。
国外已经将空气呼吸器部分电子化,如 MSA[5]、ISI[6]等国际消防设备专业公司的空气呼吸器,但这类呼吸器缺乏对消防员的姿态位置等信息的监测。在英国拉夫堡(Loughborough)大学研究小组进行的名为Secure Ad hoc Fire and Emergency Safety Network(SafetyNet)的研究中,设计的系统可获取并提供指定地点的环境和险情信息。但该系统需要预先在建筑物内布设传感器,这在目前的实际救援中还有些困难。将无线传感器网络用于消防救援领域已有很好的研究,但这些研究大都用于消防员跟踪和搜救。
本文在充分研究目前消防救援系统的基础上,将无线、GPRS、MEMS等技术进行了整合,提出一种新型消防队员装备信息系统,并对样机进行试验测试。结果表明本系统改变了消防员信息孤岛的局面。
1 系统结构
以现场救援的消防员为传感节点,通过无线链路,与各级指挥系统之间形成分布式的消防智能救援平台。在感知层,首先对传统空气呼吸器进行设计,增加电子压力传感器;其次设计内置温度和加速度传感器的便携式监测设备,使之与呼吸器传感器接口和消防员佩戴的生命体征传感器相连,实时监测消防员呼吸频次及深度、运动状态及姿态及气瓶内气体剩余使用时间、瞬时耗气量、火场温度等信息。在传输层,一方面通过433 MHz网络完成各功能模块间的数据通信,另一方面采用电信GPRS网络进行远程数据通信。在便携式监测设备上安装GPRS模块,作为感知层的网络接入及信息传输接口。在处理层,开发了多级指挥调度系统,对现场各消防员信息进行实时收集,指挥系统依据这些数据,对消防员危险状态进行预测和评估,并为救援调度提供决策依据。
系统由多级指挥管理系统、消防员佩戴的便携式无线监测器、头盔剩余气量显示与报警模块和正压式空气呼气器四部分组成,其结构框图如图1所示。整体设计方案如下。
①利用LabVIEW进行上位机界面设计,用户可在界面上看到现场消防人员的编号、呼吸器可供使用时间以及姿态,可对网络规模、报警时限等进行设置。用户也可实时观察消防员的状态信息,不仅可对消防员状态进行实施监控,并可根据这些信息对消防员进行集中调度。
②无线监测器和头盔剩余气量显示与报警模块在火灾现场可接收指挥调度指令,并发出声光报警信号以及震动报警,还可监测消防员和氧气瓶的状态信息并产生相应的报警信息。短距离通信采用433 MHz,远距离通信以GPRS的方式传输到指挥管理系统。
③利用可拔插的标签,以便实现一人一标,一套设备多人共用,只要插入标签设备就和人员对应。
④智能正压式空气呼气器增加了压力传感器以及无线传输。
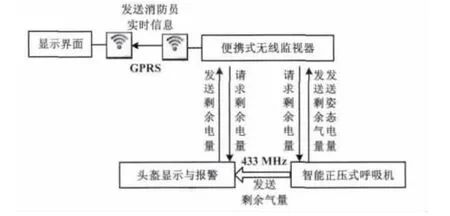
图1 系统结构框图Fig.1 Structure of the system
2 系统硬件设计
2.1 便携式无线监视器
便携式仪表首先考虑功耗,同时考虑到要进行无线通信,所以选择了TI公司的CC430芯片,其功耗仅需160 μA/MHz,并具有射频收发功能。GPRS模块使用了华为公司的GTM900模块。该模块体积小、质量轻,内嵌TCP/IP、PPP协议,便于系统设计,是一款性价比高的国产GPRS模块,其广泛应用于车载应用、遥控遥测、远程抄表、安全监控等多设备连接应用以及其他移动数据通信系统。选用ADI公司的ADXL345作为三轴加速计来测定姿态。ADXL345可以对高达±16g的加速度进行测量,并且分辨率高达13位。温度传感器选择了常用的DS18B20。外部电源作为便携式设计,选用了可充电的4800 mAh的锂电池供电。
2.2 智能正压式呼吸器
MCU同样选择 CC430。压力传感器选用HM2600。该压力传感器响应时间<2 ms,测量压力的范围可达0~40 MPa,并且工作电流<5 mA。该压力传感器为数字传感器,输出为PWM波形,方便与单片机的连接。
2.3 头盔显示与报警模块
MCU同样使用CC430。为了减小体积和耗电,利用6个LED灯来显示呼吸机中的剩余气量。同时加入了一个振动器,防止消防员在复杂环境中不能发现声光报警时,利用振动器的振动来警告消防员。
3 系统的算法实现
3.1 人体姿态判断
人体的姿态坐标如图2所示。
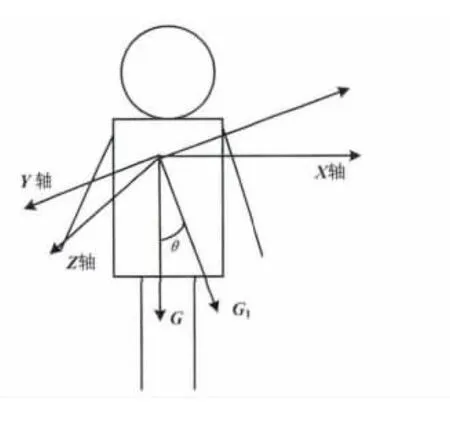
图2 人体姿态坐标Fig.2 Coordinates of human posture
当人站立时,由于地心引力,在Z轴上会产生一个重力加速度G。当人体发生倾斜时,则在新的Z轴上测得一个新的加速度G1。根据力学原理,可得:

由于重力加速度为g,即G=g,而G1可以通过三轴加速计实时测量,所以可计算出人体倾斜的角度θ。当θ大于一个预设定的值时,可以认为是消防员已经跌倒。为了防止误判,当θ大于一个预设定的值超过10 s后,系统会发出报警,说明消防员已经跌倒,需要救援。
3.2 人体运动判断
人体运动和静止可以通过以下两种方法判断。
一种方法是利用信号矢量大小(signal vector magnitude,SVM)来判断。SVM的表达式为:

当人体静止时,SVM为g;当人体运动时,SVM约为1.5g。所以可以通过设定适当的阈值来判断人体静止或运动状态。
另一种方法是人在走动的时候,Z轴的g会发生周期性变化;当人静止时,Z轴加速度会保持在g左右。因为本系统只需判断消防员是否倒地,为了增加实时性,所以采用第二种方法进行判断。
3.3 呼吸机剩余时间的计算
气瓶试验前经具有“两站一室”条件的专业厂家进行标定,利用机械压力表对电子压力传感器输出进行参照。通过不断减压并记录压力数据和气量已用时间,验证气瓶剩余气量和可用时间算法的准确性。气瓶可供呼吸的时间计算公式如下:

式中:Vr为气瓶中的剩余气量;C为气瓶容积;P为气瓶的工作压力;T为剩余时间;Vc为当前气量;Va为10 s内消耗气量。
为了增加稳定性,10 s内消耗气量通过滤波设定为:

式中:Vac为前10 s内的气量。
4 系统的软件设计
4.1 系统三个模块的软件设计
下位机软件设计利用IAR对三个不同模块进行C语言编程,设计思想如下。

图3 便携式无线监测器程序框图Fig.3 Program of the portable wireless monitor
①考虑到便于设备的维护和设备通用性,一套无线设备的地址与频段不固定。同时考虑到不同设备之间的干扰,采用自动匹配的方式。利用CC430的16个频段和16位的地址进行随机分配,所以两个设备之间的冲突概率为:

发射功率限制在1 m以内,很好地保证了设备之间互不干扰。
②考虑到数据传输的实时性,又由于UDP协议具有资源消耗小、处理速度快的优点,所以本系统GPRS模块之间的传输使用UDP协议。
③低功耗设计。综合消防员现场情况和功耗,本系统采用每10 s发一次数据。发送端设定定时器,9 s后退出休眠,打开传感器;第10 s发送数据,发送完后进休眠。接收端第9 s退出休眠,一直等到接收到数据再进休眠,开始计算时间。
④为了保证消防员进入火场前电子设备的电量充足,用户在便携式无线监测器可以查看各个模块的电量和可供使用时间。
便携式无线监测器程序框图如图3所示。头盔显示与报警模块程序框图如图4所示。智能正压式呼吸机模块程序框图如图5所示。
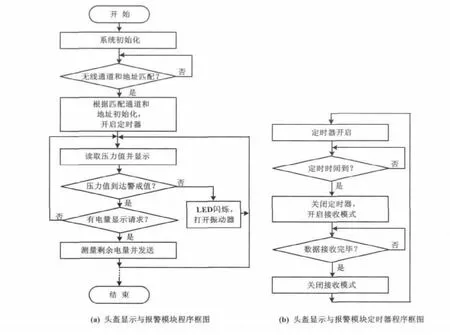
图4 头盔显示与报警模块程序框图Fig.4 Program of the helmet display and alarm module

图5 智能正压式呼吸机模块程序框图Fig.5 Program of the intelligent positive pressure respirator module
4.2 指挥管理软件设计
上位机软件使用 LabVIEW[7-11]进行开发。根据LabVIEW的特点,在设计时,利用图形化语言设计界面,数据处理和算法则通过VC++编写动态链接库。
在指挥管理软件界面,用户可以查看呼吸机可供呼吸的剩余时间、呼吸机的压力值、现场的温度显示、人体姿态的显示和系统时间等。界面设有一个报警灯,当消防员有任何意外出现,例如倒地或者呼吸机可供呼吸时间低于5 min时,该灯就会闪烁报警,并显示报警原因。
5 测试及结果
在本次测试中,测试条件为当机械压力表的压力为8.3 MPa时,人员倒地。从指挥管理软件可以看出,压力罐的压力为8.31 MPa,现场温度为27℃。从人员姿态图可以看出消防员是倒地状态,从而警报灯开始闪烁报警。此外,从指挥管理软件的界面可以看出报警的产生是由于消防员倒地而产生的。
6 结束语
为改变目前每个消防员信息孤岛的局面,提出一种新型消防队员装备信息系统。该系统在实际应用中有很大的意义,很大程度上保证了消防员的生命安全。
[1]Larry D.遥测技术在消防用空气呼吸器中的应用[J].现代职业安全,2010(2):110-113.
[2]魏立峰,孙大雷,王庆辉.等.一种消防救援专用多参数毒气监控仪的研制[J].自动化仪表,2013(3):91 -94.
[3]杨浩.我国消防救援的现状与发展趋势[A].河南省土木建筑学会.土木建筑学术文库[C].同济大学出版社,2008:432-434.
[4]Yang S H,Peter F.SafetyNET——a wireless sensor network for fire protection and emergency responses[J].Measurement and Control,2006,39(7):218 -219.
[5]Li S,Zhan A D.Efficient emergency rescue navigation with wireless sensornetworks[J].Journal ofInformation Science and Engineering,2011(27):57 -64.
[6]Lau A.Application of distributed wireless sensor network on humanitarian search and rescue systems[C]//Conference on Future Generation Communication and Networking(FGCN'08),Hainan Island,China,2008.
[7]杨乐平,李海涛.LabVIEW程序设计与应用[M].北京:电子工业出版社,2001.
[8]连海洲,赵英俊.基于LabVIEW技术的虚拟仪器系统[J].仪器与测控,2001(8):21-23.
[9]胡仁喜,王恒海,齐东明.LabVIEW 8.2.1虚拟仪器实例指导教程[M].北京:机械工业出版社,2008.
[10]陈树学,刘萱.LabVIEW 宝典[M].北京:电子工业出版社,2011:540-545.
[11]刘君华,贾惠芹,丁晖,等.虚拟仪器图形化编程语言LabVIEW教程[M].西安:西安电子科技大学出版社,2001.