水下运动目标线谱噪声源识别方法研究
2014-05-30徐灵基杨益新
徐灵基 杨益新
水下运动目标线谱噪声源识别方法研究
徐灵基 杨益新*
(西北工业大学航海学院 西安 710072)
根据运动声源的多普勒频移特性,该文提出单水听器识别低频线谱噪声源位置的3种方法。首先,利用加窗互Wigner-Ville分布(cross Wigner-Ville Distribution, XWVD)精确提取微弱多普勒频移曲线后,分别使用频率交点和最小二乘来估计噪声源通过水听器的正横时刻从而识别噪声源位置,这两种方法称为频率交点法和最小二乘法。进一步地,利用直接对多普勒信号做WVD后自交叉项的能量发散特性,得到一种计算量相对较小的噪声源识别方法。水池试验和海上试验分析结果表明,基于多普勒效应的3种方法都对噪声源进行了有效定位,性能明显优于现有的通过特性法,其中最小二乘法定位精度略优于基于交叉项特性的方法,频率交点法定位误差略大。
水声信号处理;噪声源识别;水下运动目标;多普勒频移;加窗互Wigner-Ville分布;最小二乘估计
1 引言
舰船辐射噪声主要来源于舰船的主机推进系统、螺旋桨、辅机机械系统和航行时产生的水动力效应,其中由辅机机械的往复运动引起的线谱噪声具有频率低、功率高和稳定性强等特点,携带着舰船重要的特征信息,可被远距离探测,是水声设备发现目标的关键。降低舰船噪声不仅可以有效地防止被敌方水声设备探测和被水中兵器攻击,同时也有利于提高装备在舰船上的各种水声设备的性能。因此,舰船降噪成为舰船声学设计的迫切任务,而精确识别舰船上主要噪声源的位置可以为舰船的声学设计提供参考和依据。
舰船辐射噪声测量过程中,被测船由远及近并由近及远通过测量水听器,舰船是运动的。运动目标的噪声源识别方法主要有近场声全息法[1,2]和聚焦波束形成法[3,4]。近场声全息法具有较高的识别精度,但测量面上测量数据需要传声器测点较多,且要求测量面与被测目标距离小于声波长,较难应用于实际的水下运动目标测试中,现有的较理想结果是在水池试验条件下取得的[5,6]。文献[7,8]利用阵列高分辨测向技术识别水下运动目标噪声源位置,然而对于低频声源,这类方法和聚焦波束形成法一样,需要使用较大孔径的阵列。目前实际噪声测量中主要还是利用舰船的通过特性法来识别噪声源位置[9],但该方法定位精度较低。针对舰船辅机机械的往复运动引起的低频线谱噪声源,本文根据运动目标声源多普勒频移特性,提出了识别噪声源位置的方法,在仅使用单个水听器的简单测量方式下,能够较精确地识别水下运动目标噪声源的位置。
2 基本模型与方法
图1为舰船辐射噪声的测量模型,测量水听器位于处,被测船匀速运动,轨迹为,正横位置为运行轨迹离测量水听器距离最近点,由于舰船与水听器之间存在相对运动,接收信号的幅度和频率发生变化,频率的变化称为多普勒频移。
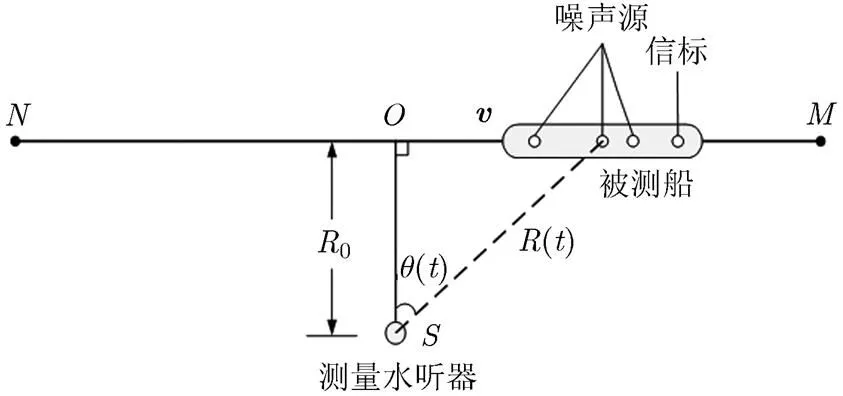
图1 舰船辐射噪声测量模型

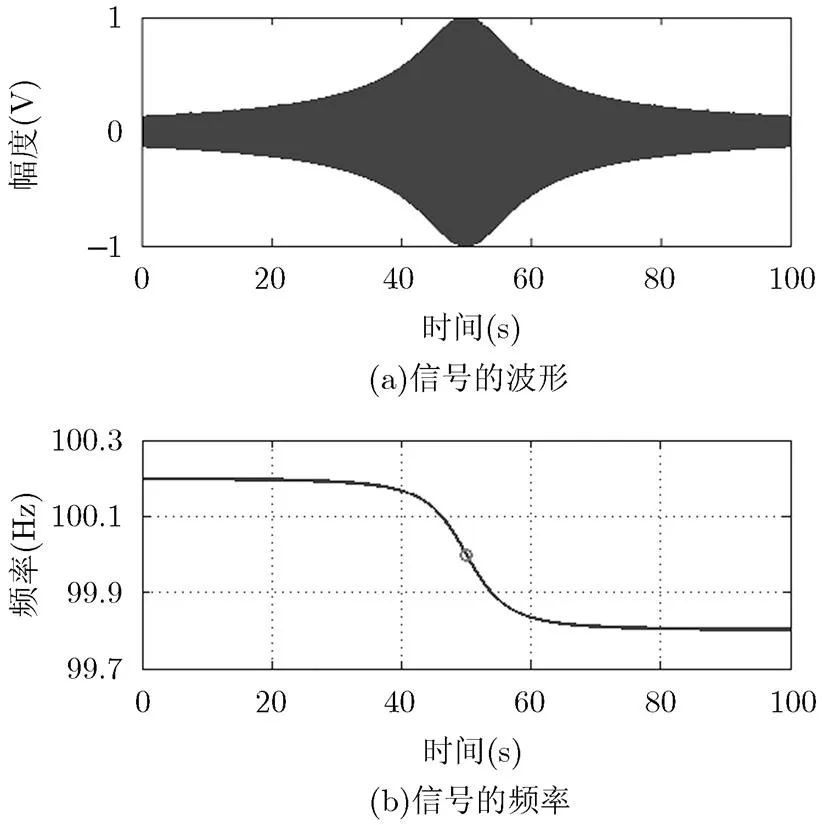
图2 典型工况下的接收信号

3 基于多普勒频移曲线提取的方法
提取多普勒频移曲线需估计接收信号的瞬时频率,在此之前先对水听器接收信号进行预处理:一是确定存在的线谱频率;二是滤除带外噪声。先把采集到的水听器信号复数化,通过频率分析方法确定信号中存在的低频线谱,再利用带通滤波器分离出存在线谱的各个小区域,得到待分析的低频线谱噪声源信号。
3.1 加窗互Wigner-Ville分布估计多普勒频移


基于加窗XWVD的瞬时频率估计步骤为:
(1)初始化:通过估计观测信号的瞬时频率得到一个单位幅度的参考信号;
(2)估计:利用式(6)得到参考信号和估计信号之间的加窗XWVD,通过加窗XWVD的峰值提取得到瞬时频率;
(3)循环:重复步骤(1)直到连续迭代间的瞬时频率的差值小于一个设定值。
3.2 正横时刻估计

解偏微分方程组
(1)首先剔除已提取出的多普勒频移曲线中的野点,然后做中值滤波处理可得到较平滑的曲线。由于提取出的曲线中间段多普勒频移明显、曲线更平滑,而两端的曲线会有一些起伏,所以可消去前后比较动荡的数据点,选取中间较平滑的多普勒频移曲线的数据点。
(2)从步骤(1)中得到的数据点中分别选择不同长度的数据点,相当于用长度不同的窗口去截取数据,一般原则是在多普勒曲线图中预估拐点,并以此为中心截取一段左右对称的数据,然后利用最小二乘法估计各组数据的多普勒参数。
4 多普勒信号WVD自交叉项法

将式(12)代入式(11)得到
则信号的WVD为
通过图1中的几何关系可知




5 水池试验分析

图3为基于多普勒效应的3种方法对中心频率为100 Hz线谱声源定位的误差()随信噪比变化的统计特性,其中图3(a)为偏差,图3(b)为均方根误差,每个信噪比下做50次蒙特卡罗试验。图3(a)中基于多普勒效应的3种方法的偏差曲线在零值上下微小起伏,最小二乘法和交叉项法性能相当,频率交点法偏差略大。从图3(b)中可以看出3种方法定位的均方根误差随信噪比的增大而变小,其中基于最小二乘法的性能最佳,交叉项法次之,频率交点法最次,3种方法的均方根误差在信噪比10 dB以上都小于3 m。相比较于频率交点法,最小二乘法利用了有效多普勒信号时频曲线的全部信息,其稳健性更优,这也是该方法均方根误差较小的原因。

6 海上试验验证
海上试验在大连某海域进行。接收端水听器由抛锚的测量船放出,深度位于水线下10 m。发射平台为双体船,搭载低频发射换能器作为辐射声源,以高频水声同步定位仪的发射换能器作为参考声源。两声源分别固定于船体中轴线上的两个可升降支架底部,间距为19.2 m,试验时均放入水线下6 m。为避开发射船体的谐振峰值,声源发出的信号频率选用55 Hz, 105 Hz, 220 Hz和500 Hz。发射船采用5节航速工况,沿直线行驶,船体与水听器之间的相对速度以及正横距离通过水声同步定位仪的高频信息获得。
图5给出了中心频率为105 Hz的多普勒信号的分析结果。其中,图5(a)为直接对多普勒信号做WVD得到的3维图,可以看出多普勒信号的WVD在多普勒时频中心形成明显的峰值,利用峰值检测可以精确获得声源通过测量水听器时的正横时刻为134.42 s;图5(b)是加窗XWVD精确提取出的微弱多普勒频移曲线,再利用频率交点或最小二乘得到正横时刻的估计值分别为134.05 s和134.68 s。

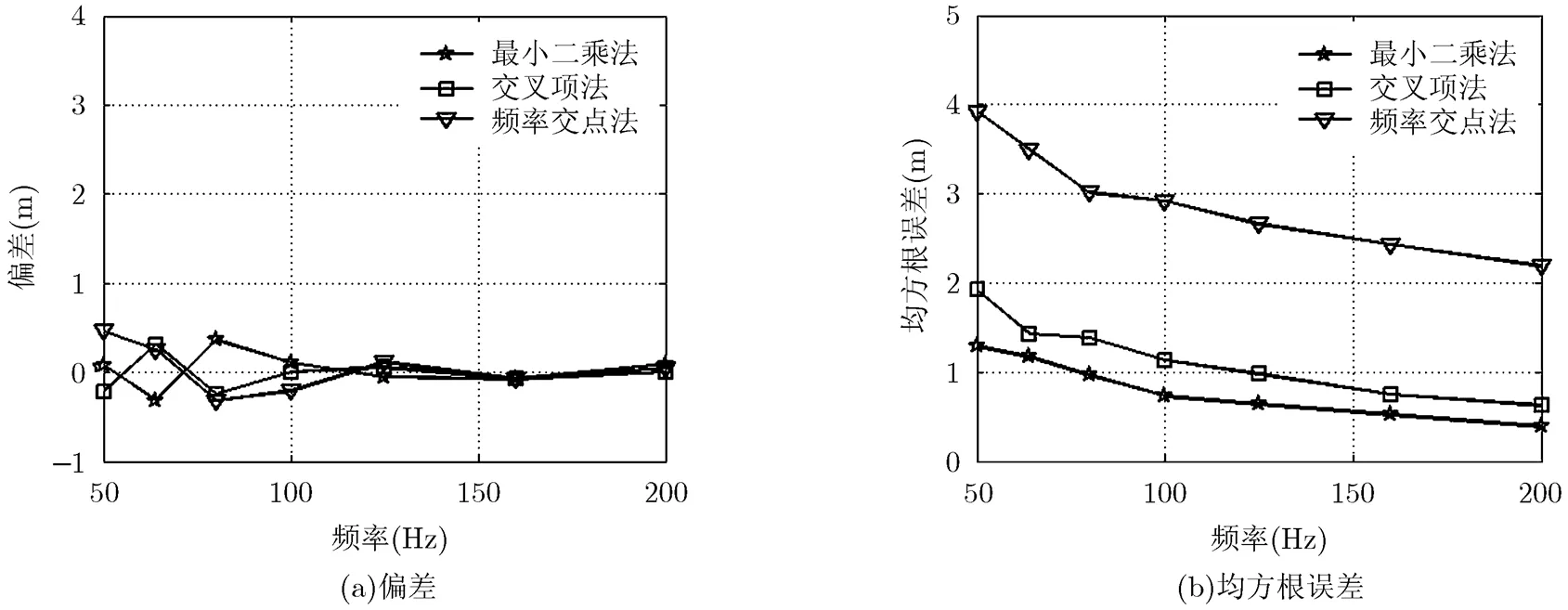
图4 定位误差对频率的统计性能
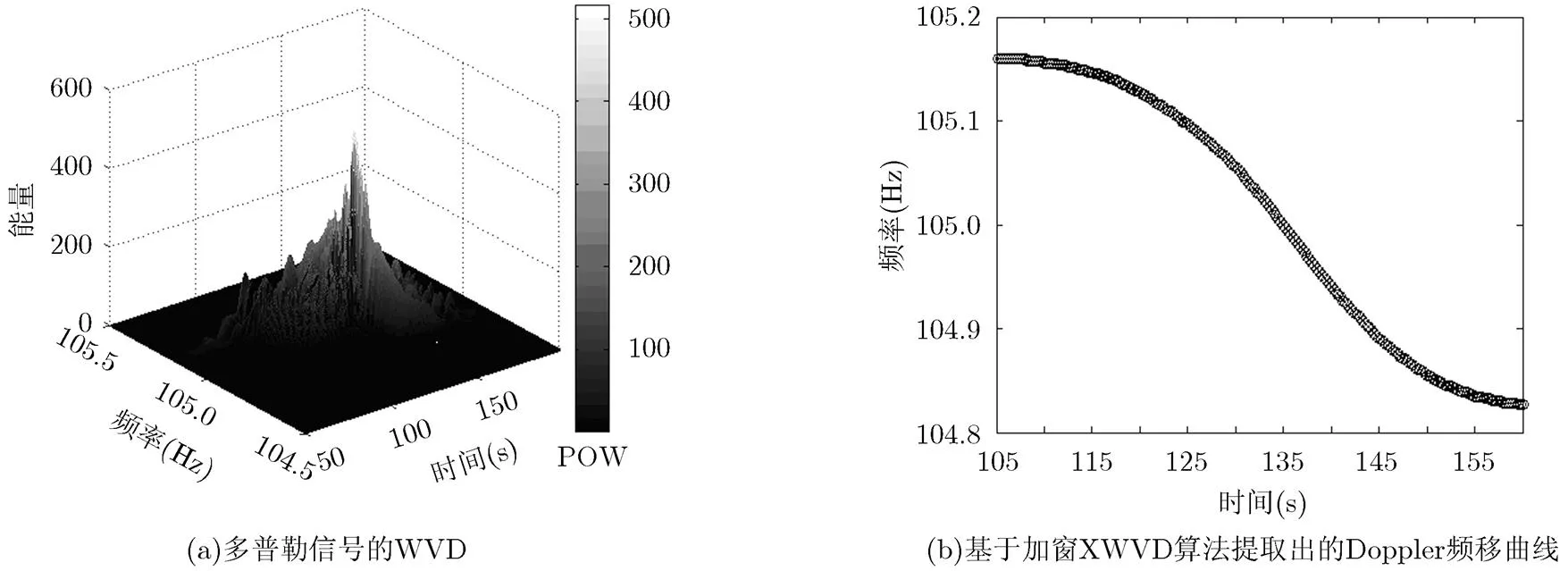
图5 声源频率为105 Hz的实测数据分析

表1 海试时不同工况条件下各种方法估计的正横时刻(s)和定位误差(m)
7 结束语
本文提出了利用多普勒效应识别水下运动目标噪声源位置的3种方法。频率交点法和最小二乘法是通过基于加窗XWVD的瞬时频率估计算法提取出微弱多普勒频移曲线后,分别使用频率交点或最小二乘估计提取出的多普勒频移曲线的正横时刻,最后参考信标源位置来确定噪声源在运动目标上的位置。而交叉项法是利用多普勒信号WVD的自交叉项的能量发散特性来估计正横时刻从而识别噪声源位置,该方法相对前两者要简易。水池试验和海上试验结果表明:基于多普勒效应的3种方法都可以有效地对线谱辐射声源位置进行识别:其中,最小二乘法定位精度略优于交叉项法,频率交点法定位误差稍大,但也明显优于现用的通过特性法。需要说明的是,本文的分析和试验都取噪声源为点源模型,对于噪声源为面声源的情况,利用本文方法所得到的多普勒时频面将会有一定程度的扩展,所提取出的多普勒频移曲线或中心对应着面声源中能量最强部分,即识别的是面声源中辐射能量最强处的噪声源位置。
[1] Yang Dian-ge, Wang Zi-teng, Li Bing,.. Development and calibration of acoustic video camera system for moving vehicles[J]., 2011, 330(11): 2457-2469.
[2] 杨殿阁, 罗禹贡, 李兵, 等. 基于时域多普勒修正的运动声全息识别方法[J]. 物理学报, 2010, 59(7): 4738-4747.
Yang Dian-ge, Luo Yu-gong, Li Bing,.. Aoustic holography method for measuring moving sound source with correction for Doppler effect in time-domain[J]., 2010, 59(7): 4738-4747.
[3] Holland K R and Nelson P A. An experimental comparison of the focused beamformer and the inverse method for the characterization of acoustic sources in ideal and non-ideal acoustic environments[J]., 2012, 331(20): 4425-4437.
[4] 时洁, 杨德森, 时胜国. 基于矢量阵的运动声源柱面聚焦定位方法试验研究[J]. 物理学报, 2012, 61(12): 124302.
Shi Jie, Yang De-sen, and Shi Sheng-guo. Experimental research on cylindrical focused beamforming localization method of moving sound sources based on vector sensor array[J]., 2012, 61(12): 124302.
[5] 陈梦英, 商德江, 李琪, 等. 运动声源的边界元声全息识别方法研究[J]. 声学学报, 2011, 36(5): 489-495.
Chen Meng-ying, Shang De-jiang, Li Qi,.. Nearfield acoustic holography based on inverse boundary element method for moving sound source identification[J]., 2011, 36(5): 489-495.
[6] 杨德森, 郭小霞, 时胜国, 等. 基于亥姆霍兹方程最小二乘法的运动声源识别研究[J]. 振动与冲击, 2012, 31(4): 13-17.
Yang De-sen, Guo Xiao-xia, Shi Sheng-guo,.. Helmholtz equation least squares method for moving sound source identification[J]., 2012, 31(4): 13-17.
[7] 严光洪, 陈志菲, 孙进才. 运动目标噪声源识别方法[J]. 西北工业大学学报, 2009, 27(3): 378-381.
Yan Guang-hong, Chen Zhi-fei, and Sun Jin-cai. A method for localizing noise source of constant-speed target[J]., 2009, 27(3): 378-381.
[8] 王志伟, 徐灵基, 杨益新, 等. 直线阵识别水下运动目标噪声源方法研究[J]. 振动与冲击, 2012, 31(19): 118-122.
Wang Zhi-wei, Xu Ling-ji, Yang Yi-xin,.. Identification of noise sources of an underwater moving target based on a linear array[J]., 2012, 31(19): 118-122.
[9] 王之程, 陈宗岐, 于沨, 等. 舰船噪声测量与分析[M]. 北京:国防工业出版社, 2004: 91-98.
Wang Zhi-cheng, Chen Zong-qi, Yu Feng,.. Warship Noise Measuring and Analyzing [M]. Beijing: National Defence Industrial Press, 2004: 91-98.
[10] Feng Zhi-peng, Liang Ming, and Chu Fu-lei. Recent advances in time–frequency analysis methods for machinery fault diagnosis: a review with application examples[J]., 2013, 38(1): 165-205.
[11] Boashash B. Time Frequency Signal Analysis and Processing: A Comprehensive Reference[M]. London: Elsevier, 2003: 63-66.
[12] 田丰, 杨益新, 吴姚振, 等. 窄带细化Wigner-Ville分布分析的快速实现方法[J]. 电子与信息学报, 2013, 35(7): 1713-1719.
Tian Feng, Yang Yi-xin, Wu Yao-zhen,.. Fast realization of zoom-spectrum Wigner-Ville distribution analysis in a narrowband[J].&, 2013, 35(7): 1713-1719.
[13] Lo K W, Ferguson B G, Gao Yu-jin,.. Aircraft flight parameter estimation using acoustic multipath delays[J]., 2003, 39(1): 259-268.
[14] Omidvarnia A, Azemi G, O’Toole J M,.. Robust estimation of highly-varying nonlinear instantaneous frequency of monocomponent signals using a lower-order complex-time distribution[J]., 2013, 93(11): 3251-3260.
[15] Cornu C, Stankovic S, Ioana C,.. Generalized representation of phase derivatives for regular signals[J]., 2007, 55(10): 4831-4838.
徐灵基: 男,1986年生,博士生,研究方向为水声信号处理.
杨益新: 男,1975年生,教授,博士生导师,研究方向为阵列信号处理、信号检测与参数估计、声呐系统设计等.
Identification of Tone Noise Sources of Underwater Moving Target
Xu Ling-ji Yang Yi-xin
(,,710072,)
According to the Doppler shift of moving acoustic source, three methods are presented for identification of noise sources of underwater moving target with single hydrophone. Firstly, the weak Doppler shift curves are obtained accurately by windowed cross Wigner-Ville Distribution (XWVD). Then the abeam moments are estimated by frequency intersection or least square algorithm. Locations of noise sources are obtained by referring to beacon source at last.These two methods are respectively called frequency intersection method and least square method. Furthermore, based on the effect of energy dispersion caused by inner artifacts, another identification method is proposed by applying WVD to Doppler signal directly, and this cross-term method needs less computation. The water tank and sea experiment results show that performances of these proposed methods are better than the existing passing property method. Among the three methods, the least square method is the best one, next is the cross-term method, and frequency intersection method is the worst in comparison.
Acoustic signal processing; Identification of noise sources; Underwater moving target; Doppler shift; Cross Wigner-Ville Distribution (XWVD); Least square estimate
TB566
A
1009-5896(2014)05-1119-07
10.3724/SP.J.1146.2013.01102
杨益新 yxyang@nwpu.edu.cn
2013-07-25收到,2013-12-02改回
国家自然科学基金(11274253)资助课题