多卫星导航信号联合捕获算法的检测性能分析
2014-05-30仝海波朱祥维张国柱欧钢
仝海波 朱祥维 张国柱 欧钢
多卫星导航信号联合捕获算法的检测性能分析
仝海波*朱祥维 张国柱 欧钢
(国防科学技术大学电子科学与工程学院 长沙 410073)
针对多卫星联合捕获算法缺乏检测性能分析与评估的问题,该文采用处理增益来衡量联合捕获相对于传统捕获的灵敏度提高程度。分别给出了处理增益在匹配接收和不完全匹配接收条件下的表达式,详细推导了多卫星信号的时延和多普勒误差引起的检测损耗,比较了联合捕获与传统捕获在时延和多普勒误差下的检测损耗。采用数值仿真方法验证了理论分析的正确性,仿真结果表明联合捕获的检测损耗总体上小于传统捕获的检测损耗。
全球卫星导航系统;累积检测;联合捕获;检测损耗;处理增益
1 引言
随着我国北斗系统和欧洲Galileo系统等新导航星座的出现,卫星导航信号的接收和处理面临着更多的机遇和挑战。一方面,有更多公开的导航信号资源、实时性更强的辅助信息可供接收机利用;另一方面,导航芯片在智能终端上的广泛集成使得弱信号环境下的应用更加迫切,如建筑物内、城市峡谷、树木遮挡等环境。

传统单星信号捕获算法的工程实现中,由于多普勒等误差对检测性能的影响存在着成熟的解析计算方法,所以在不同动态范围约束条件下的最优参数设计能够准确、快速地完成[12]。对于多星联合捕获算法,由于不同卫星信号之间的时延和多普勒误差存在差异性,传统单星捕获所使用检测损耗分析方法不能直接应用在联合捕获算法中。此外,已有的数值仿真分析方法需要平衡精度和计算量的问题。随着可见卫星的增多,仿真计算量也显著增加。
针对多星联合捕获算法的检测性能评估问题,本文提出一种适用于不同时延和多普勒误差情况下的检测性能评估方法。基于传统捕获算法检测损耗的研究基础,用处理增益来表示联合捕获相对于传统捕获的性能改进程度。分别给出了处理增益在完全匹配接收和不完全匹配接收的两种情况下的计算式,详细推导了检测损耗随不同卫星信号时延和多普勒误差变化的表达式。最后采用蒙特卡洛法对理论分析结果进行了仿真验证。
2 多卫星信号联合捕获算法
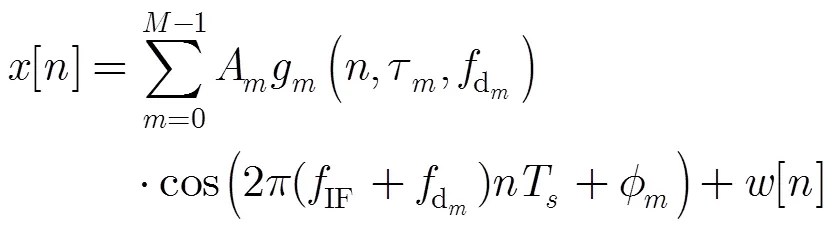
以GPS L1民用信号为例,接收的射频信号经下变频和采样后得到的数字中频信号可表示为




由检测概率计算式可知,联合捕获使得非中心参数与可见卫星数成正比。随着可见卫星数的增大,非中心参数增大,为检测性能的增强提供必要条件。
3 处理增益分析
3.1 理想条件下的处理增益
为了定量分析多星联合捕获算法相对于传统单星信号捕获的优势,我们采用处理增益来衡量信号捕获灵敏度的提高程度。同时处理增益便于不同可见卫星数下联合捕获性能的对比和性能优化。假设在理想条件下各卫星信号的载噪比相等(也可通过加权预处理实现)且信号同步参数能够准确估计。此时,多星联合捕获算法相对于传统相干积累捕获的理想处理增益为

3.2 时延和多普勒误差影响下的处理增益
在用户PVT向信号同步参数的映射过程中,由于信号传播环境的复杂性和搜索分辨率的限制,信号同步参数的估计值存在着误差,文中将这些误差简称为时延和多普勒误差。这些误差的存在使得联合捕获算法难以达到理想的处理增益性能。为定量分析时延和多普勒误差对联合捕获算法的检测性能的影响,引入理想检测能力因子和检测损耗等概念[12]。下面给出联合捕获算法检测损耗解析式的推导过程。

图2 联合捕获的理想处理增益随可见卫星数变化情况
在时延和多普勒估计无误差的理想条件下,联合捕获算法的理想检测能力因子为
在多普勒和时延误差的影响下,第颗卫星信号经相关和相干积累后的等效信噪比为


那么,联合捕获算法相对于理想相干接收机的检测损耗为
由式(12)可知,在评估联合捕获算法的检测损耗时需要计算期望值,简单直接的方法是通过蒙特卡洛仿真计算得到。但是,这种数值仿真的方法给最优参数设计(如最优的中频积累时间、搜索分辨率等)带来了巨大的计算量。通常情况下,导航信号的时延和多普勒中无法估计的部分为随机变量,所以时延和多普勒误差为高斯白噪声。结合传统最小二乘定位解算的前提假设可知,各卫星信号的时延误差为独立同分布的随机过程。类似地,由传统测速原理知各卫星信号的多普勒时延误差也为独立同分布随机过程。因此,检测损耗可以简化为

结合式(8)和式(13),多星联合捕获在考虑上述误差引起的检测损耗时,处理增益可表示为
为进一步降低处理增益评估的计算量,接下来分别推导时延和多普勒误差引起的检测损耗解析式。首先,考虑时延误差引起的检测损耗,忽略多卫星信号中伪码序列互相关的影响,那么伪码自相关函数可近似为
将式(15)代入式(13),则时延误差引起的检测损耗满足
其中为正整数。
结合式(18)并对式(17)两边求期望,可得

4 仿真结果
为验证理论分析的正确性,通过蒙特卡洛仿真得到联合捕获的检测损耗以及处理增益,同时给出联合捕获检测损耗和处理增益的理论分析值进行比对。由于传统捕获损耗已有成熟的理论分析[12],在仿真结果中我们选择它与联合捕获检测损耗进行比较。信号模型由式(1)给出,其中噪声的均值为0,方差为1,可见卫星数为12,信号载噪比为40 dB-Hz,通过调整有用信号幅度可仿真不同载噪比的卫星信号[16]。
最后,进一步对检测损耗影响下的处理增益进行仿真验证,并考虑3种不同的相干积分时间。由式(14)可知,时延误差的检测损耗不受相干积分时间的影响,所以在处理增益的仿真试验中将时延损耗设置为常数。联合捕获算法中的相干积分时间分别选取1 ms, 10 ms和100 ms。在计算处理增益时,传统捕获的相干积分时间固定为1 ms。
如图5所示,通过式(12)的理论计算和蒙特卡洛仿真分别给出了联合捕获增益随多普勒误差变化的情况。联合捕获算法处理增益的理论分析值与仿真值在不同的相干积分时间下均表现出较好的一致性。在不延长相干积分时间的条件下,即相干积分时间均为1 ms,联合捕获算法相对于传统捕获算法有7.5 dB左右的处理增益,这与图2中的理论分析结果一致;随着多普勒误差的增大,联合捕获的处理增益逐渐减小。当联合捕获采用延长相干积分时间的方法来提高处理增益时,多普勒对处理增益的影响明显增强。从图5中也可以看出:当多普勒误差小于50 Hz时,选取更长的相干积分时间可以获得显著增大的处理增益;当多普勒误差大于等于50 Hz时,相干积分时间为10 ms和100 ms的处理增益相差不大。
5 结论
对多星联合捕获算法的检测性能进行了分析,提出采用处理增益的方法衡量联合捕获相对于传统捕获的灵敏度变化,详细推导了处理增益在理想条件和误差影响下的解析表达式。数值仿真结果进一步对理论分析进行了验证,表明了联合捕获相对于传统捕获算法的优越性。所提出的检测性能量化分析方法可为联合捕获中频积累时间的优化、搜索空间分辨率选取等提供理论参考。今后将对非相干和差分相干积累在联合捕获中的性能优化进行研究,进一步减小多普勒等误差对处理增益的影响。
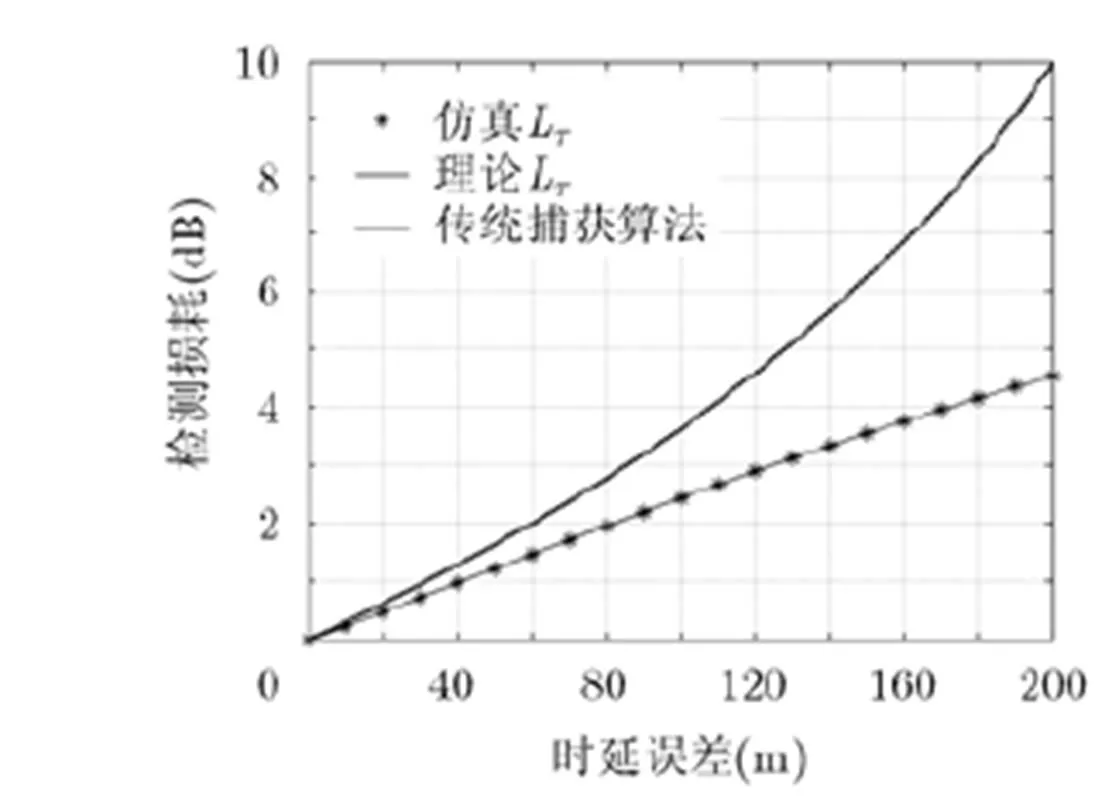
图3 时延误差的损耗分析
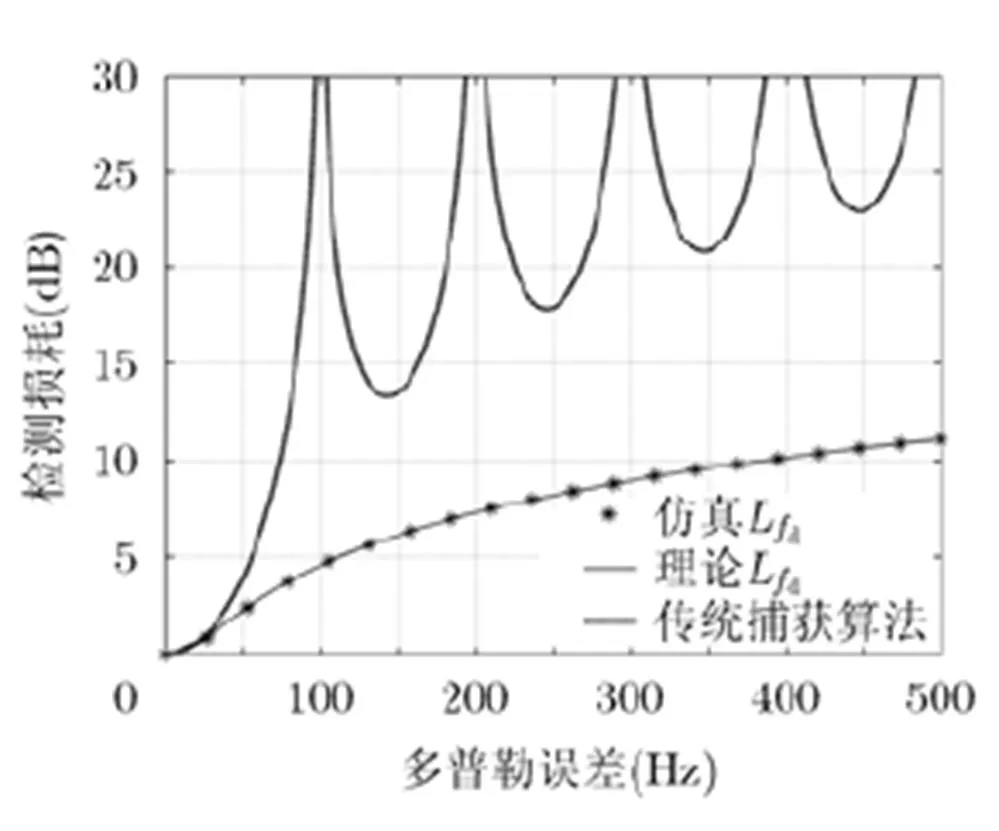
图4 多普勒误差的损耗分析
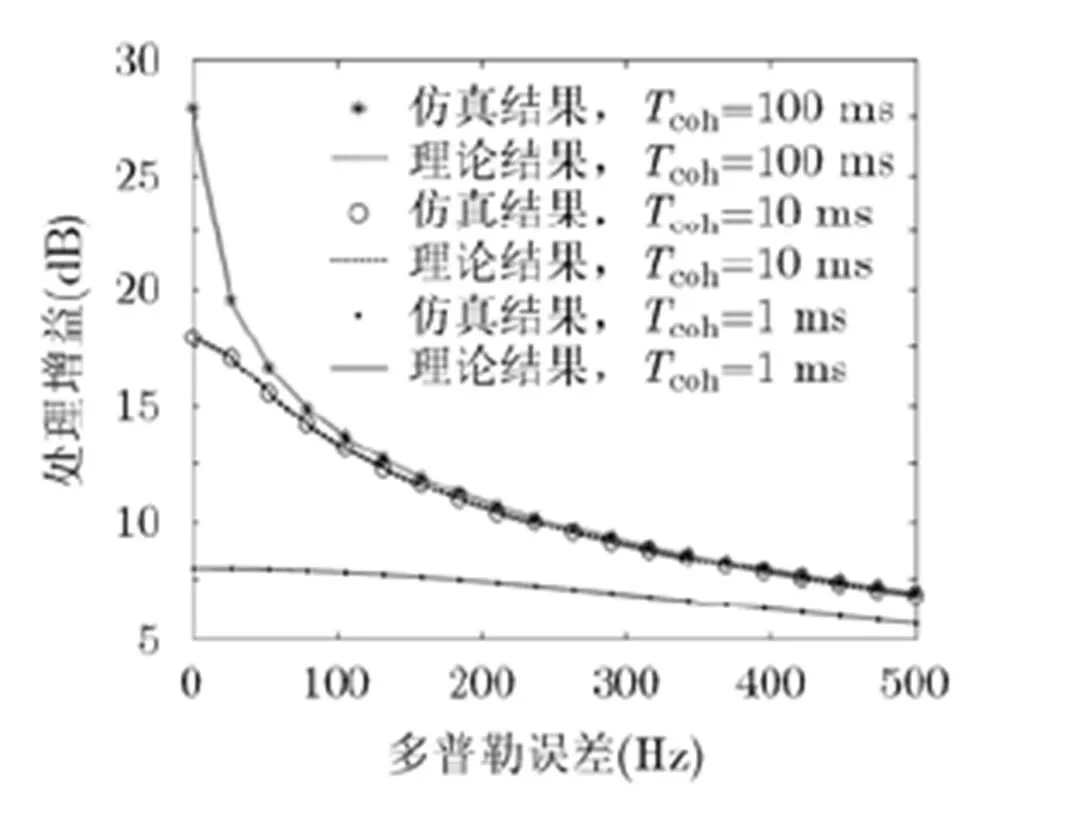
图5 联合捕获的处理增益验证
[1] Axelrad P and Bradley B K. Collective detection and direct positioning using multiple GNSS satellites[J].:, 2012, 58(4): 305-321.
[2] Progri I and Bromberg M. Maximum-likelihood GPS parameter estimation[J].:, 2005, 52(4): 229-238.
[3] Closas P, Fernández-Prades C, and Fernández-Rubio J A. Maximum likelihood estimation of position in GNSS[J]., 2007, 14(5): 359-362.
[4] Tahir M and Presti L L. Two sequential acquisition techniques for weak GNSS signals[C]. First IEEE AESS European Conference on Satellite Telecommunications (ESTEL), Rome, Italy, October 2012: 1-6.
[5] Bialer O, Raphaeli D, and Weiss A. Maximum likelihood direct position estimation in dense multipath[J]., 2013, 62(5): 2069-2079.
[6] Bialer O, Raphaeli D, and Weiss A J. Efficient time of arrival estimation algorithm achieving maximum likelihood performance in dense multipath[J]., 2012, 60(3): 1241-1252.
[7] Weil L R. A high performance code and carrier tracking architecture for ground-based mobile GNSS receivers[C]. 23rd International Technical Meeting of the satellite Division of the Institute of Navigation (ION GNSS 2010), Portland, USA, 2010: 3054-3068.
[8] Closas P, Fernández-Prades C, and Fernández-Rubio J A. Cramér-Rao bound analysis of positioning approaches in GNSS receivers[J]., 2009, 57(10): 3775-3786.
[9] Bradley B K, Axelrad P, Donna J,.. Performance analysis of collective detection of weak GPS signals[C]. 23rd International Technical Meeting of the satellite Division of the Institute of Navigation (ION GNSS 2010), Portland, USA, 2010: 3041-3053.
[10] Cheong J W, Wu J, Dempster A G,..Assisted-GPS based snap-shot GPS receiver with FFT-accelerated collective detection: time synchronization and search space analysis[C]. 25th International Technical Meeting of the satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville USA, 2012: 2357-2370.
[11] Lin T, Ma M, Broumandan A,.. Demonstration of a high sensitivity GNSS software receiver for indoor positioning[J]., 2013, 51(6): 1035-1045.
[12] 朱祥维, 王飞雪. 基于平方律检波的二相编码信号分段相关-视频积累方法研究[J]. 电子学报, 2005, 33(3): 545-548.
Zhu Xiang-wei and Wang Fei-xue. Study on segment correlation-video integration method using square-law detector for binary phase-coded signals detection[J]., 2005, 33(3): 545-548.
[13] Kaplan E D and Hegarty C J. Understanding GPS Principle and Applications [M]. Second Edition, Norwood: Artech House, 2006: 135-142.
[14] Simon M K. Probability Distributions Involving Gaussian Random Variables: A Handbook for Engineers, Scientists and Mathematicians [M]. New York: Springer, 2006: 35-48.
[15] Groves P D. GPS signal to noise measurement in weak signal and high interference environments[C]. 18th International Technical Meeting of the satellite Division of the Institute of Navigation (ION GNSS 2005), Long Beach, USA, 2005: 643-658.
[16] 李新山, 郭伟, 谢先斌. 一种高动态、弱信号GPS比特同步方法[J]. 电子与信息学报, 2011, 33(10): 2521-2525.
Li Xin-shan, Guo Wei, and Xie Xian-bin. A GPS bit synchronization method for high-dynamic and weak signal[J].&, 2011, 33(10): 2521-2525.
仝海波: 男,1984年生,博士生,研究方向为卫星导航信号的捕获算法和接收机自主完好性监测技术.
朱祥维: 男,1980年生,副教授,研究方向为卫星导航信号的捕获、跟踪算法以及时频同步技术.
张国柱: 男,1978年生,副研究员,研究方向为卫星导航信号模拟与导航系统测试技术.
Detection Performance Analysis of Joint Acquisition for Multi-satellite Signals
Tong Hai-bo Zhu Xiang-wei Zhang Guo-zhu Ou Gang
(,,410073,)
The joint acquisition algorithm is used for collection detection of the multi-satellite signals, given the lack of analysis and assessment on its detection performance. To make the case, the processing gain is adopted to measure the improved the level of sensitivity of the joint acquisition as opposed to the traditional acquisition; the analytic expressions of the processing gains are given respectively with the ideal assumption and the errors of the signal synchronization parameters; the detection losses caused by the delay and Doppler errors are analyzed in detail; the detection losses of the joint acquisition are compared with those of the traditional acquisition. Furthermore, some simulations are performed to verify the analytic results, which show that most of the detection loss in the joint acquisition is less than those in the traditional one.
Global Navigation Satellite Systems (GNSS);Collective detection; Joint acquisition; Detection loss; Processing gain
TN967.1
A
1009-5896(2014)05-1069-06
10.3724/SP.J.1146.2013.01097
仝海波 hbo.tong@gmail.com
2013-07-25收到,2014-01-17改回
新世纪优秀人才支持计划(NCET-08-0144)资助课题