香水机自动灌装机构的设计与分析
2014-05-29郑秀丽何炳蔚
郑秀丽,何炳蔚
(1.福州大学,福建 福州 350002;2.浙江工贸职业技术学院,浙江 温州 325003)
0 引言
将香水物料灌装入香水瓶中是化妆品包装机械的重要组成部分,其灌装的量可以通过对自动定量灌装装置的控制来实现。其香水瓶子可以是圆柱型、方型、椭圆型等任何形状。灌装的物料可为单色液体、混合液体、带亮片液体等。要完成自动灌装动作,则首先必须通过长形灌装嘴(如图1所示)伸入灌装瓶内,以便外部灌装机构能顺利将物料通过灌装嘴灌入瓶子中[1]。为了实现定量灌装这一要求,需要在自动灌装机构上设计一个能够控制灌装量的机构,使灌入瓶子的物料一直保持定量要求。目前市场上典型香水灌装设备主要采用伺服带动的滚珠丝杆实现的定量灌装[2],该机构需要安装较多的附件来实现灌装的稳定运行。正因为这种机构在运行过程中承受较大的负载量,需配置大功率电机,导致占用很大的安装空间,其整体效率普遍不高,且高速灌装时废品率较高。我们结合机械设计结构学和新式包装机械设计理论,借助计算机三维仿真、结构造型等技术方法,提出一种利用圆周曲柄连杆实现香水精确定量灌装机构,该机构可以解决安装空间大和电机功率损耗过大的问题。
1 灌装机构组成原理及数学建模
自动香水机精确灌装机构的工艺流程为:首先固定于气缸上的灌装嘴通过气缸的升降将其插入到瓶中(如图2所示),通过导管将暂存在灌装组件的物料灌入到灌装嘴中,进入到瓶内。
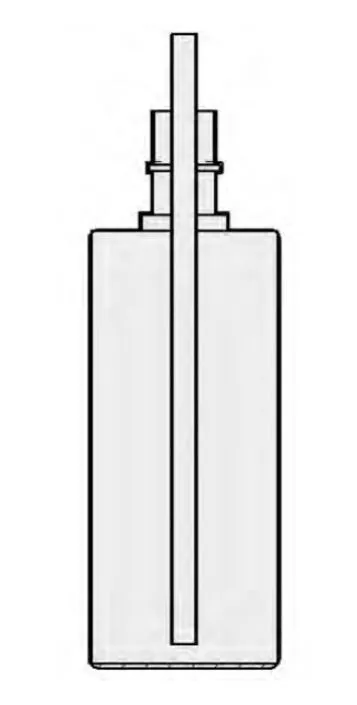
图1 伸入瓶中的长形灌装嘴
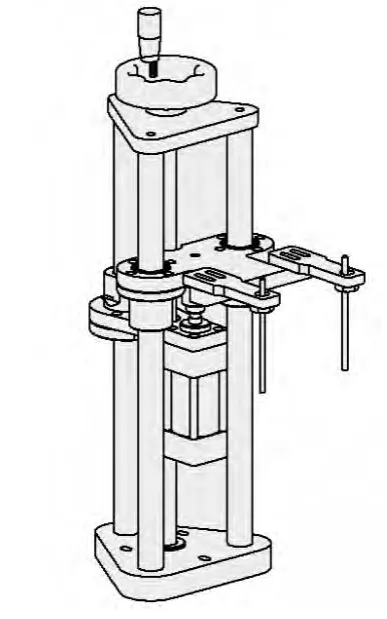
图2 灌装嘴的支撑动作机构
自动香水机精确灌装机构内部的灌装量是通过伺服电机的脉冲转动角度来进行精确控制,如图3所示,电机带动小齿轮进行圆周运动,通过小齿轮和大齿轮的啮合,带动了大齿轮作反方向的圆周运动[2],我们在大齿轮的同心轴上安装一组曲柄连杆机构固定于大齿轮上,使其能够跟随着大齿轮作圆周运动。曲柄通过铰链与大齿轮作同步转动,在曲柄的另一端安装上连杆,并将连杆与固定于灌装桶内的活塞导杆连接,通过以上的相互关联,电机的动力就通过圆周曲柄连杆组件实现的三角函数关系的方式传递到灌装料桶内,来达到定量灌装的目的。其实际二维机构如图4所示。
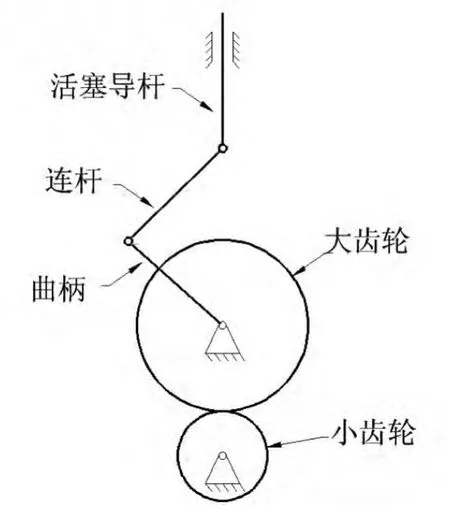
图3 运动机构图
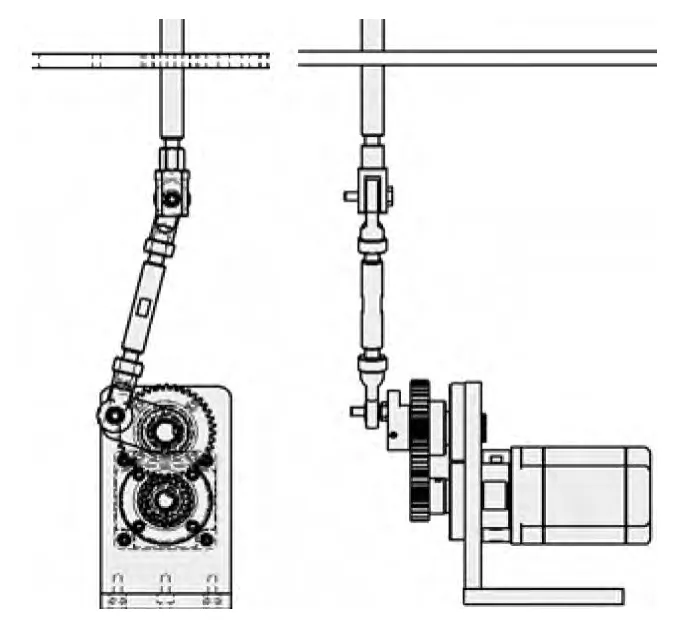
图4 实际二维机构图
将图3所示的运动机构进行三角函数建模分析(如图5所示),设曲柄边长为a,由于其跟随大齿轮进行圆周运动,因此其与连杆的交点的运行轨迹是以a为半径的圆,三角形的另一边为连杆长度,其边长设为c,可以求得第三边边长为c+x-a(其中x为活塞导杆的行程)。根据三角函数余弦定理,三角形任何一边的平方等于其他两边平方的和减去这两边与它们夹角余弦积的两倍[3],可得:
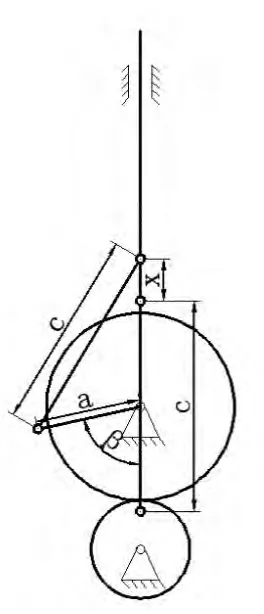
图5 三角函数分析
当

当
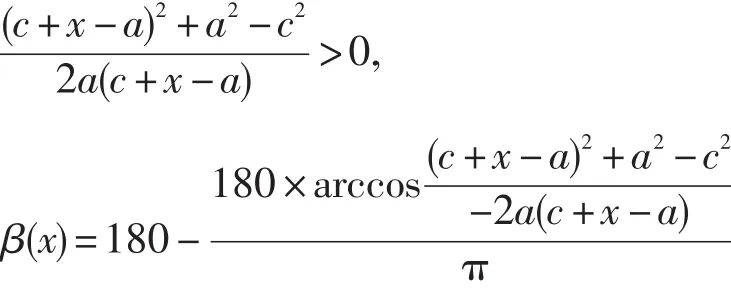
其中:a<x<2a,值域0<β<180∘。
通过上述公式及符号的正负号转换后即可使旋转角度β在0到180度内,与行程x成唯一对应关系,通过MATALAB软件绘制圆周曲柄旋转角度与位移的运动关系机构位移传动简图(如图6所示),可以看出其运动位移量与角度几乎成正比例关系。
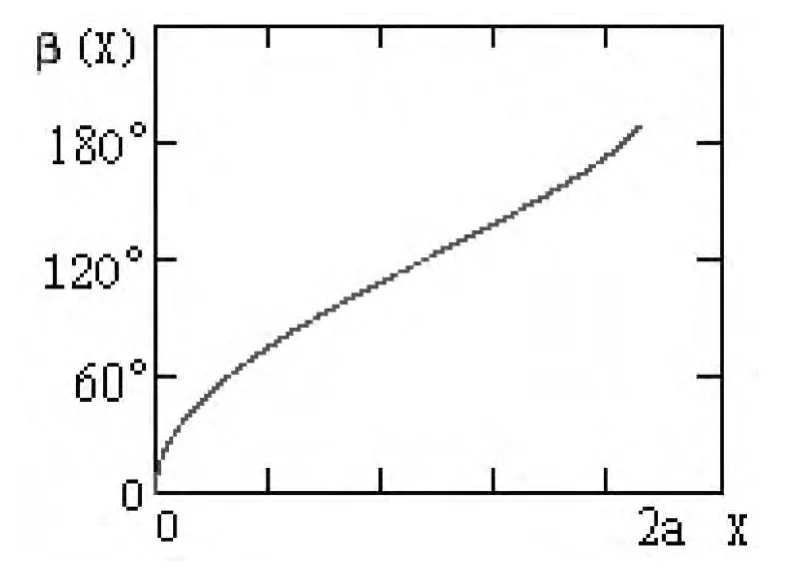
图6 机构位移传动简图
因此,可以通过伺服电机控制小齿轮的旋转角度来控制位移量,进而控制料桶的物料出料量,达到精密定量灌装的目的。
整个机构的动作执行过程都是通过伺服电机的往复运动得以实现,当电机正转时推动物料进入瓶子,当电机反转时从储料罐内吸入物料以备下回灌装使用。对电机运行脉冲数的精确控制可以保证该机构的动作协调性、提高其位置精确度和高速的性能[4]。如设计伺服定位精度为1μm/pulse,齿轮比为F,那么通过内部电子齿轮比换算后电机旋转行程为x的灌装量和伺服电机传动量关系为:

2 新型灌装机构的特点及创新点
通过实际测试,该机构可应用于不同的液体物料在各种场合的灌装,其控制部件可选择伺服电机或者步进电机等智能定位系统,具有广泛的通用性。该机构与传统的滚珠丝杆结构相比,省去了大量用于定位的附属部件,灌装物料时仅通过圆周曲柄连杆机构实现备料与灌装,机械结构紧凑,占用空间更小,效率更高。当应用于更高标准的灌装精度时,则需要相关部件更为精细,如增加齿轮的齿数,连杆长度等,并应用高强度的铝塑密封材料实现更可靠的密封,保证灌装过程中没有任何外来气体进入,否则很容易导致灌装的不准确。其最大的创新点是利用齿轮啮合实现的圆周曲柄机构替代传统的滚珠丝杆机构,既节省了安装所需的空间,又节省了成本费用。
3 结束语
通过对新型香水灌装设备的圆周曲柄连杆机构分析研究,将电机的圆周旋转运动转换为近似正比例的直线运动的灌装机构。改变传统灌装设备中利用滚珠丝杆所导致的占用较大安装空间、功率损耗过大的缺点。该机构将齿轮与连杆机构巧妙地组合到一起,有效地实现了简单精确的灌装要求,在保证精度的条件下实现最高效的运行。其研究成果将对设计新型自动香水灌装机的灌装组件具有重要意义。
[1]李连进.包装机械选型手册[M].北京:化学工业出版社,2013:164-192.
[2]孙智慧.包装机械概论[M].北京:印刷工业出版社,2012:33-68.
[3]戴乃昌.机械CAD[M].杭州:浙江大学出版社,2012:50-160.
[4]张国全.包装机械设计[M].北京:印刷工业出版社,2013:48-81.