2500t环轨式起重机有限元参数化建模与分析
2014-05-25周奇才张许辉李文军吴青龙王玉宝
周奇才,张许辉,李文军,吴青龙,王玉宝
(同济大学 机械与能源工程学院,上海 201804)
2500t环轨式起重机轨道呈环形,臂架采用人字形组合臂架及全液压变幅、回转及起升装置.臂架长度为45.5~120.4m,幅度为10~72m,最大起重量2 564t,如图1.
采用传统法与有限元法相结合进行2500t环轨式起重机的设计,有限元法实现起重机金属结构的非线性计算,检验传统法的设计方案.由于2500t环轨式起重机结构复杂,工况较多,每个工况都需要相应的有限元模型,重复建模工作量大,延长了起重机设计周期.为了解决这个问题,本文基于ANSYS的APDL语言建立了2500t环轨式起重机的参数化有限元模型,可以满足所有工况的有限元模型的建立及分析,只需在开发界面输入设计变量值,即可自动完成起重机模型的建立、材料的设置、单元的分配、网格的划分、边界条件和载荷的施加及有限元计算,大大节省了重建模型的时间,提高了起重机设计效率.

图12500 t环轨式起重机示意图Fig.1 Schematic diagram of 2500tring crane
1 参数化建模
APDL语言是一种用来完成有限元常规分析操作或通过参数化变量方式建立分析模型的脚本语言[1].利用APDL语言的二次开发功能可以开发出设计变量输入界面,实现设计变量的批量输入,同时结合ANSYS批处理功能,自动完成有限元模型的建立.
1.1 模型简化与单元选择
2500t环轨式起重机的结构复杂,为了在不影响计算精度的前提下提高有限元分析速度,需要对有限元模型进行简化.省略环形轨道基础、平衡梁及配重,以相应的边界约束替代;省略塔头及起升机构,以质量点的形式施加在主臂架顶端;模型中将焊缝视为刚接;省略箱体上能影响网格划分质量的小孔、圆角等元素.
正确选择单元是有限元分析的重要环节,根据结构受力及ANSYS单元特性,选择的单元类型为:①主臂架、撑杆架、主臂横梁弦杆、腹杆以及变幅系统的撑杆采用Beam189单元;②变幅系统拉板、眼镜板及钢绞线采用Link180单元;③主臂架、撑杆架两端箱体采用Shell181单元;④塔头及起升机构质量采用Mass21单元.
1.2 有限元参数化建模
批处理功能是ANSYS软件的一大特色,建模之前,利用ANSYS软件可生成批处理文件.在批处理文件中,用APDL语言进行编程,首先定义设计变量,2500t环轨式起重机设计变量主要有模型几何尺寸及载荷大小.
利用APDL二次开发功能可以开发出用于设计变量输入的用户交互界面,见图2.图中各参数含义为:ZB_BZJ_N为主臂标准节数目;ZB_QJ为主臂架倾角;CGJ_QJ为撑杆架倾角;FW_ZB_X为主臂架x方向风载荷;FW_ZB_Z为主臂架z方向风载荷;FW_CGJ_X为撑杆架x方向风载荷;FW_CGJ_Z为撑杆架z方向风载荷;Fq为起升载荷.分别输入几何参数及载荷参数,用户界面将输入的设计变量值传递到ANSYS所打开的批处理文件中,替换原有的设计变量值.ANSYS根据新设定的设计变量值建立模型,从而实现变幅系统的参数化,建立不同主臂架长度及倾角、不同撑杆架倾角的有限元模型.
1.2.1 变幅系统参数化
变幅系统见图1.随着主臂标准节数目的变化,变幅系统中变幅拉板及变幅眼镜板的数目将发生变化,标准节数目与变幅拉板及变幅眼镜板的数目一一对应,在批处理文件中用表格型数组将这种对应关系表达出来,同时定义2个局部变量来分别表示变幅拉板和变幅眼镜板的数目,分别为BFLB_NH和BFYJB_N,将数组中数据传递到这2个局部变量,再用局部变量的值建模,从而建立3个变量之间的关系,实现变幅系统参数化.
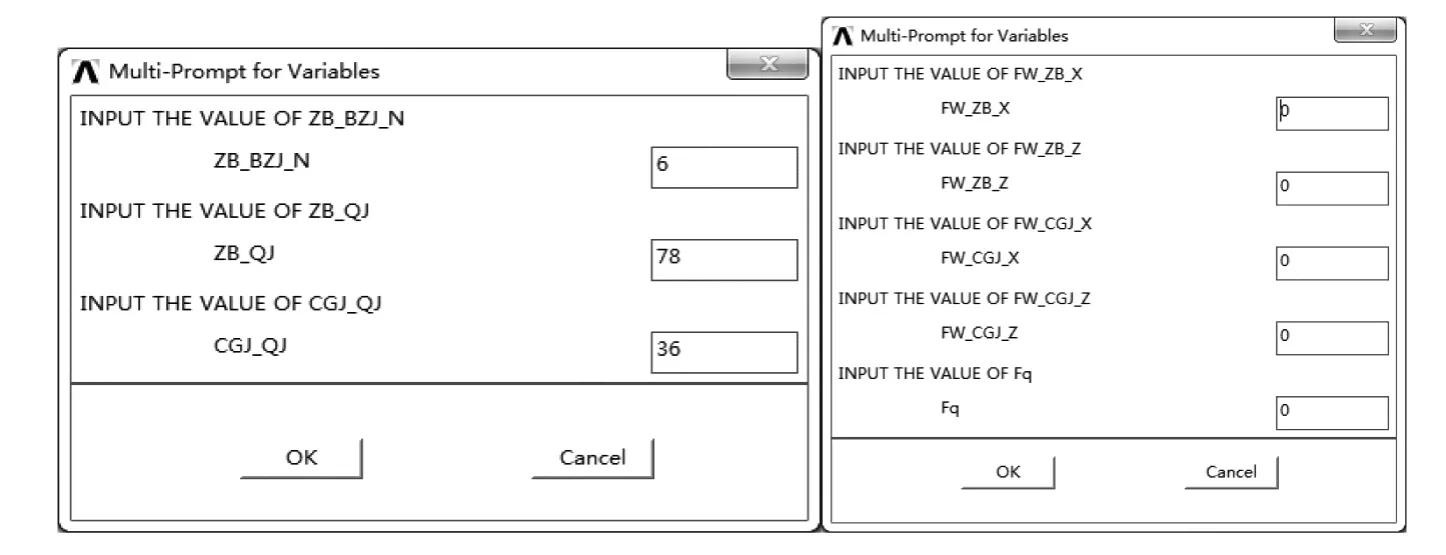
图2 几何参数及载荷参数输入界面Fig.2 Geometric parameters and load parameters input interface
现实情况下,变幅系统在自重作用下呈悬垂结构,变幅系统处于拉紧状态.在ANSYS环境下,为了正确模拟这种状态,对变幅系统施加预应力,使变幅系统在初始状态下处于拉紧状态.为了更好地模拟钢绞线,将单元特性设置为仅受拉.需要注意的是,在施加预应变之前,需要将环境坐标系设置为单元坐标系,这样才能施加轴向预应力.
1.2.2 主臂架参数化
建模过程中,采用自底向上的建模方式,主臂架是由标准节组成,如图3所示.将一个标准节创建成组件,沿主臂架长度方向复制该组件,将标准节数目参数化,就可以实现主臂架长度的参数化.需要注意的是环境坐标系采用局部坐标系.为了实现主臂架与水平面夹角的参数化,采用柱坐标系,将主臂架旋转一个变量的值.为了使参数化后的主臂架能和变幅大连接件在重合点处耦合,采用限制节点编号技术,将耦合点的编号限定住,这样耦合点编号不会随着变量的改变而改变.

图3 主臂最短,倾角78°Fig.3 Shortest main boom,78degree angle
1.2.3 防后倾装置参数化
防后倾装置只在主臂架后倾的情况下才受压,不受拉.为了正确地模拟防后倾装置的作用机理,采用Link180单元来模拟,并设置单元特性为仅受压.
这样防后倾装置就可以在起重机正常工作工况下随主臂架的倾角变化而自动改变长度,仅在主臂架后倾工况时承受压力,正确模拟了防后倾装置的实际作用机理.
1.2.4 边界条件
变幅系统与撑杆架和主臂架的连接通过耦合技术来实现.耦合连接点处的Ux,Uy,Uz为3个位移自由度,Rx,Ry为2个旋转自由度.撑杆架顶端销轴孔处约束的Uy,Uz为2个位移自由度,Rx,Ry为2个旋转自由度.撑杆架和主臂架底端销轴处约束绞点的Ux,Uy,Uz为3个位移自由度,Rx,Ry为2个旋转自由度.最终,可实现2500t环轨式起重机在不同臂架长度、不同倾角、不同变幅系统下的有限元模型的建立,包括建立模型、划分网格、施加边界条件及载荷.选取4种典型工况为例,建立如图3—6所示的有限元模型.
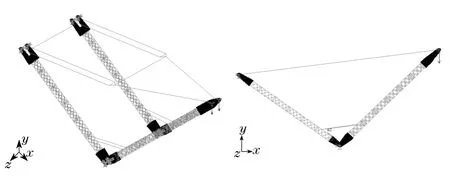
图4 主臂最短,倾角45°Fig.4 Shortest main boom,45degree angle
2 典型工况非线性计算
2.1 非线性设置
分析类型设置为静态分析,在静态分析中应用大变形效应,不需要激活应力刚度效应.正常情况下,应力刚度效应形成了所有相容的切向矩阵,然而对于某些特殊的非线性情况,比如由于某些单元不能提供完备的相容切向矩阵而导致计算发散,在这种情况下,关闭应力刚度效应才能取得收敛.由于应用了大变形效应,对于18X单元族,是否激活应力刚度效应对计算是没有影响的,因为应力刚度效应总是包含在大变形效应内[1].

图5 主臂最长,倾角78°Fig.5 Longest main boom,78degree angle
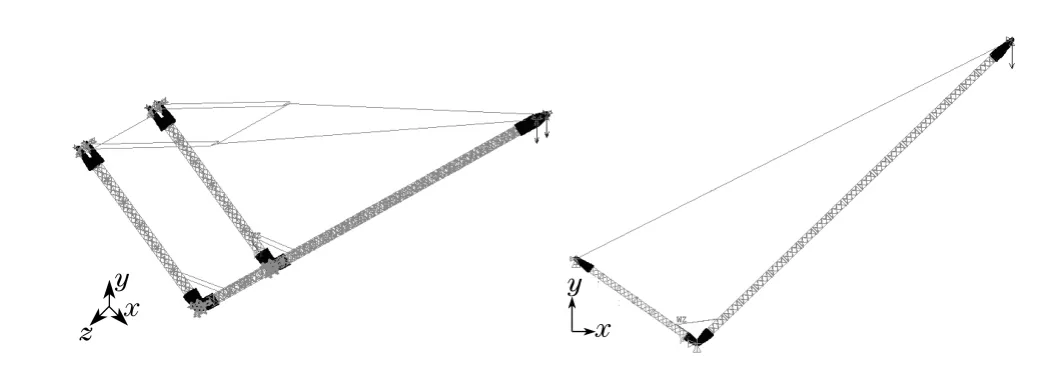
图6 主臂最长,倾角45°Fig.6 Longest main boom,45degree angle
2.2 计算工况及载荷组合
为了验证该参数化有限元模型非线性计算的正确性,选取了起重机的2种典型工况进行非线性计算,见表1.工况1为2500t环轨式起重机最大额定起升工况,主臂架长度最短,主臂架倾角为78°,幅度10m,起升载荷为2500t;工况2为2500t最大起升高度工况,主臂架长度最长,主臂架倾角为78°,幅度44m,起升载荷为37t.载荷组合为B1,B1是起重机在正常工作状态下,无约束地起升地面的物品,考虑工作状态风载荷及其他气候影响产生的载荷[2-3].
非线性计算时,设定3个载荷步,载荷步1为预应力和重力加速度,载荷步2为风载荷,载荷步3为起升载荷.
2.3 计算结果与分析
2种典型工况的有限元计算结果如图7—10所示.图7、图9分别为工况1,2的应力云图,其中最大应力发生在主臂架顶端杆单元与壳单元的连接处,此处为点接触,出现应力集中,故此处应力不能作为设计依据.图8、图10分别为工况1,2的节点y向位移云图.结果显示,排除应力集中部位,其他部位等效应力大小合理.我们关心的是杆件的受力,单独查看杆件的应力及y向位移,工况1最大应力发生在主臂架最底层的标准节上,最大位移发生在主臂最高点,工况2最大应力发生在主臂架中间部位,最大位移发生在变幅系统上.应力及位移大小见表1.该结果可用于2500t环轨式起重机的详细设计.

表1 各工况杆件最大应力及y向位移Tab.1 Maximum stress and y displacement of each bar in all conditions

图7 工况1等效应力云图Fig.7 Von Mises stress of working condition one

图8 工况1 y向位移云图Fig.8 Ydisplacement of working condition one

图9 工况2等效应力云图Fig.9 Von Mises stress of working condition two
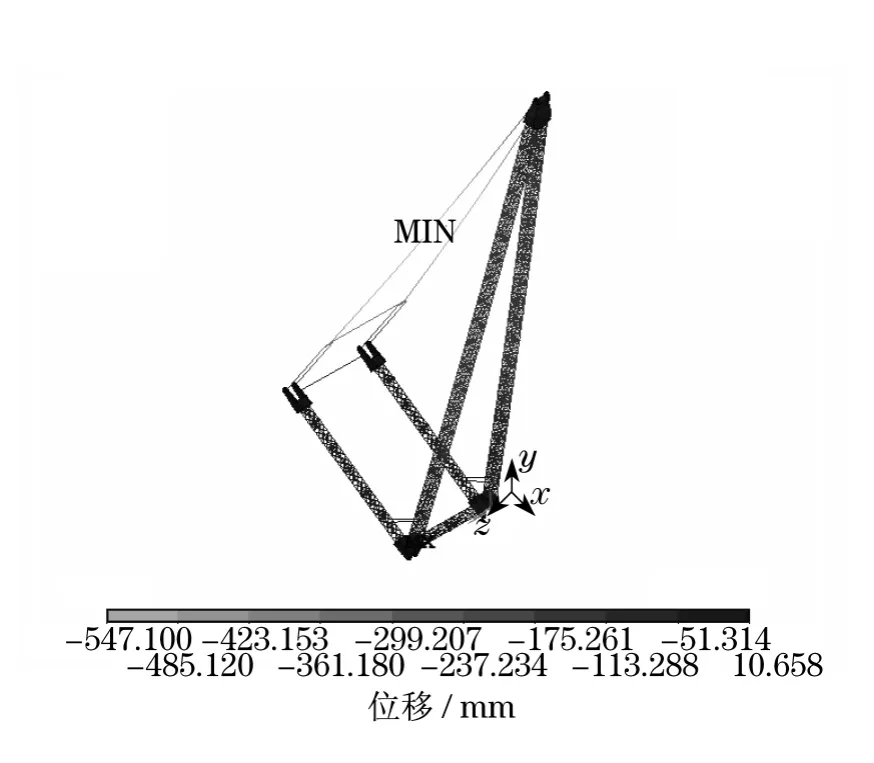
图10 工况2 y向位移云图Fig.10 Ydisplacement of working condition two
3 结语
本文结合实际项目,提出了大型臂架类起重机整机参数化的思想,运用APDL语言建立了2500t环轨式起重机的参数化有限元模型,并通过算例验证了该思想及方法的可行性与正确性.参数化有限元模型的建立大大提高了项目设计的计算效率,缩短了设计周期.同时,由于是起重机整体建模及分析,分析结果更加真实.为了使设计者使用起来更加方便,下一步将继续优化用户交互界面,建立一个起重机系列化有限元分析平台,使分析计算不仅仅局限在2500t的起重量上,建立一款专用于环轨式起重机的有限元计算的软件.
[1]龚曙光,谢桂兰,黄青云.ANSYS参数化编程与命令手册[M].北京:机械工业出版社,2009.GONG Shuguang,XIE Guilan,HUANG Qingyun.ANSYS parametric programming and command canual[M].Beijing:China Machine Press,2010.
[2]中国国家标准化管理委员会.GB/T 3811—2008起重机设计规范[S].北京:中国标准出版社,2008.Standardization Administration of the People’s Republic of China.GB/T 3811—2008Design rules for cranes[S].Beijing:China Standards Press,2008.
[3]张质文,虞和谦,王金诺,等.起重机设计手册[M].北京:中国铁道出版社,1998.ZHANG Zhiwen,YU Heqian,WANG Jinnuo,et al.Crane’s design handbook[M].Beijing:China Railway Press,1998.