基于地面三维激光扫描仪的丘陵地区地形快速测量*
2014-05-22李婷峰杨润萍
李婷峰,杨润萍
(湖北交通职业技术学院,湖北武汉 430079)
0 引言
最近几年,三维地面激光扫描技术不断发展并日渐成熟,已经成功的在文物保护、城市建筑测量、地形测绘、采矿业、变形监测[1]、工业领域大型设备形变测量[2]、公路铁路建设、隧道工程、桥梁改建[3]等领域中得到广泛应用。地面三维激光扫描仪的巨大优势就在于可以快速扫描被测物体,不需反射棱镜即可直接获得高精度的扫描点云数据。
本文介绍了地面三维激光扫描仪的工作原理,并详细地阐述了Riegl VZ-400三维激光扫描仪实现桔园地形测绘成图的过程和效果。实践结果表明,在树木稀少的丘陵地区,利用地面三维激光扫描仪可以快速获取数据、生产数字地形图。作为一种新型的数据获取手段,地面三维激光扫描仪还存在着不足。最后结合本次地形测绘工程中遇到的问题进行了讨论,说明其应用的不足之处以利于该技术的进一步研究。
1 地面三维激光扫描仪的工作原理
地面三维激光扫描仪是以反射镜进行垂直方向扫描,以计步马达转动仪器来完成水平方向360°扫描,从而获取三维点云数据。具体如下:首先由激光脉冲二极管发射出激光脉冲信号,经过旋转棱镜,射向目标P,然后通过探测器,接收反射回来的激光脉冲信号,并由记录器记录,这样可以计算目标点P与扫描仪距离S。精密时钟控制编码器同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值β(见图1)。地面三维激光扫描测量一般使用仪器内部坐标系统(即以仪器为坐标原点),X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直。由此可计算采样点坐标,公式[4-5]为:

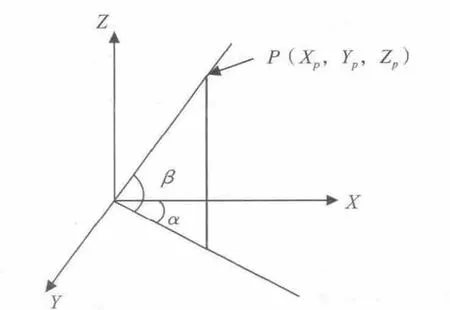
图1 扫描仪三维坐标计算示意图Fig.1 Schematic diagram of scanner's 3D coordinates calculation
扫描仪上方的数码相机主要用于获取目标物的纹理信息和边缘信息,可以为后期数据处理提供参照。
2 应用实例
此项目主要使用Riegl VZ-400地面三维激光扫描仪对南漳县峡口镇桔园进行1∶2 000数字地形图测绘。测量作业时,使用三维激光扫描仪开展地形数据采集工作,并辅以GPS-RTK系统对标靶点和测站点进行坐标定位[6]。
2.1 工程概况
为满足桔园规划和建设的需要,需要对桔园进行1∶2 000数字地形图的测绘。该测区为块状,范围约8 km2,地形较为复杂,以山地为主。地物有水库、山路、少量房屋、少量农田、电线等。最重要的是该地区树木稀少(见图2)。经分析认为,该测区非常适合利用地面激光扫描仪结合GPS-RTK进行作业。
图2 测区(部分)实况Fig.2 A section of terrain in survey area
2.2 前期规划
由于本测区地形复杂,以山地为主,所以对测区的地形特征进行分析是很有必要的,这样可以提高外业作业效率。这次是利用测区已有的等高线地形图对测区周围环境进行考察,结合扫描仪的射程及特点估计扫描仪应设的站数,并在地形图上标出每站的大致位置并作上记号。前期规划的目的:一要保证最终获取的所有数据能代表完整的测区;二要选择尽量少的测站以减少原始数据量。
2.3 点云数据采集
点云数据采集步骤如下:
1)架设基站:测量作业时,首先将基准站架设在测区内的已知点(平面坐标和高程已知)上。基准站一般架设在本次测区中间,视野开阔、周围无高大树木、无高大建筑物、远离强电磁波发射源和大面积水面的已知点上。
2)选择架设扫描仪位置:根据等高线地形图上的记号找到相应的实地位置再结合周围地形选择架设扫描仪的位置。尽量选择扫描覆盖范围广,且遮挡较少的位置。尽量顾及容易漏测的位置,比如山沟等。选择架站位置的好坏直接关系到外业工作量和采集数据的质量。仪器置平后量测该站的仪器高并进行记录。
3)选择后视位置:为了能够在扫描数据上快速找到反射片的位置,后视位置尽量选择有明显特征的地物附近,如电线杆,标靶与扫描仪间的距离要在扫描仪的有效使用范围内。标靶按作用可分为:拼接标靶和控制标靶。拼接标靶用来进行两站的点云数据配准,控制标靶用来纠正点云数据到真实坐标。此项目采用的标靶既用作拼接标靶也用作控制标靶。
4)创建项目与相机参数标定:在进行一个新的扫描前,需要确保驱动器正确连接、开关打开和通讯端口设置正确。确定后打开Riegl VZ-400地面三维激光扫描仪自带的软件RiSCAN Pro创建一个新的工程(该项目名为Project1),接着进行数码相机参数的标定。
5)数据获取:第一步创建扫描站点;第二步用RiSCAN Pro软件进行三维数据获取,要设置水平方向上扫描起始和停止的角度、垂直方向上的角度、扫描分辨率、扫描次数等,这些参数会影响扫描一次所需要的时间。本项目中第一次使用的是较低分辨率360°粗扫描,是为了获取更准的仪器倾斜角度;然后再设置高精度的角度分辨率进行反复扫描,确保扫描数据精度;最后找出反射体,对反射体进行精细扫描以便准确提取标靶中心点。
6)相片获取:三维点云数据获取过程结束后,下一步就是通过固定在激光扫描仪上的Nikon D300s-20mm数码相机采集相片。对测区的特殊地形及地物拍照有利于后期的数据处理、地形图的编辑修改。
7)获取绝对坐标:用流动站RTK精确测量该站的标靶坐标和扫描仪位置坐标。
8)以后每站不用重新创建项目与标定相机参数,只需重复前面2、3、5、6、7步即可。如果测区超出了基站信号覆盖范围(一般为3~4 km),则需重新架设基站,即需重复前面1~6步。
2.4 点云数据处理
2.4.1 测站拼接
Riegl VZ-400地面三维激光扫描仪提供了3种与点云数据相关的坐标系[7]:扫描仪坐标系SOCS、工程坐标系PRCS和大地坐标系GLCS。扫描仪每一站获取的点云数据都是基于扫描仪坐标系的,测站之间的拼接就是将各测站各自的扫描仪坐标系通过一个转换矩阵MSOP转换到同一个工程坐标系中。最后根据已知大地坐标和工程坐标的控制点计算工程坐标系与大地坐标系之间的转换矩阵MPOP。
本项目是通过RiSCAN PRO软件提供的后视定向方法计算每一站的扫描仪坐标系与工程坐标系的转换矩阵。在后视定向方法的视图中输入相应的数据、确定相关参数后便可计算转换矩阵MSOP。完成所有测站的坐标转换后,所有测站就在同一个工程坐标系下,这就实现了测站拼接。为了使测站之间拼接得更准确还可以使用RiSCAN PRO提供的多站平差(MSA)功能模块对所有测站进行平差。
2.4.2 数据压缩
三维激光扫描仪是按线扫描的,点与点之间的间距很小,每测站采集的点云数可达到几十万到几百万个。所以对于大数据量的三维数据在模型化前要进行数据采集,因为模型化是一个耗时的计算过程,对计算机硬件要求较高。本项目是利用RiSCAN PRO软件中的Octree filtering(反向树型过滤)方法对扫描数据进行重采样。
2.4.3 数据滤波
点云数据采集时难免会采集到含有粗差的相关观测数据和无效数据,如植被、电线、房屋等。为了得到正确的地形信息,需要对采集的数据进行数据滤波,剔除干扰信息。可以在RiSCAN PRO软件中剔除噪声点,也可以将拼接后的三维数据坐标提取出来,导入第三方软件(如植被过滤软件)中进行噪声点剔除。
2.4.4 等高线生成
经过多次滤波和压缩后,用保留下来的点生成等高线。图3是部分区域的点云数据,由这些数据生成的等高线见图4。具体步骤是:将保留的点云数据导出,保存为.dxf格式的文件,再在制图软件中打开该文件,基于这些高程点构建三角网,对三角网优化后生成等高线(见图4)。图5为该部分区域的三维模型(填充后)。
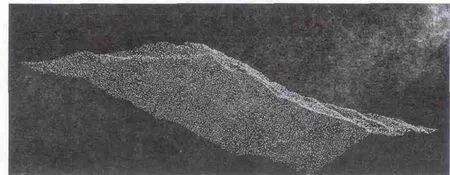
图3 滤波压缩后的点云Fig.3 The filtered and compressed point clouds
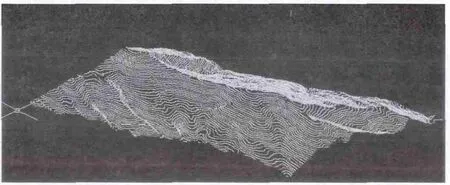
图4 等高线Fig.4 Contour lines
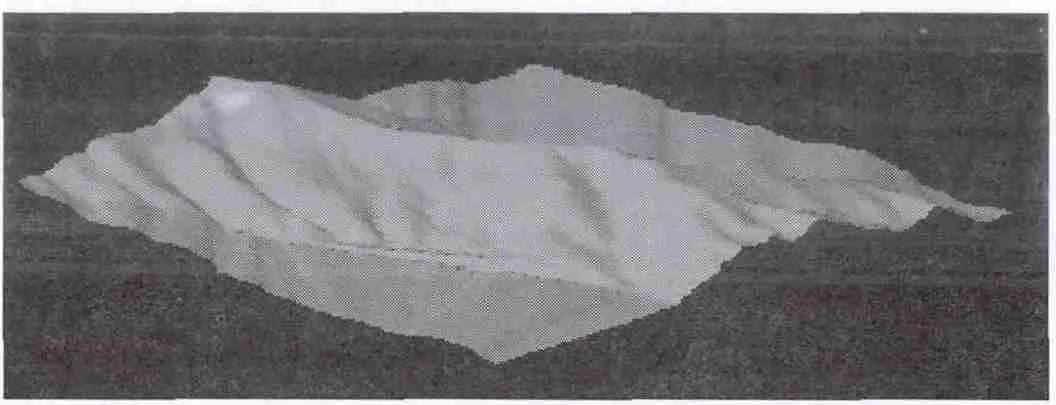
图5 三维模型Fig.5 3D model
3 利用三维激光扫描仪进行地形测绘的优势和不足
3.1 地面三维激光扫描仪在丘陵地区地形测绘应用中的优势
1)地面三维激光扫描仪可以快速、高效的获取点云数据。点云的坐标精度可以达到mm级。这样既可以减轻外业测绘人员的工作量、提高工作效率,还可以获取令人满意的测量成果。
2)本测区主要以山地为主,地形复杂,如果用传统的数字化测图仪器(如GPS接收机、全站仪等)进行野外测量,采集的数据可能不准确、不全面,这可能会造成绘制的等高线失真,从而难以准确反映实际地形。
3)对于高陡地段,借助传统的测量仪器难以获取高精度的地形数据,同时还存在测量人员的安全问题。这时采用三维激光扫描仪开展数据采集具有很大优势。
3.2 地面三维激光扫描仪自身与应用的不足
1)由于工程范围相对较大,凹凸不平起伏较大的地形较多,所有扫描仪的站点布设非常重要,既要保证数据不能缺失,又要保证数据不能过分冗余。怎样更好的布设站点还需要进一步研究,提出更加合理的前期规划方案,以提高外业作业效率、提供高质量的点云数据。
2)当地形高低起伏遮挡情况比较严重时,如山体上植被茂密时,容易出现数据黑洞,形成局部数据缺失。
3)三维激光扫描的点云数据丰富,其中包含了许多非地貌数据,为了得到准确的地形图,要对数据进行过滤、压缩,这就造成不必要的工作量。由于目前自动化或半自动化剔除点云数据中非地貌数据软件还不够成熟[8],加上经验不足,所以点云数据处理是主要的难点。
4)在数据的后期处理中,如三角化、数据优化中,需要较多人工干预,自动化程度不高,如何选定参数在很大程度还处于选择和优化的过程,这是限制三维地形快速成图的关键所在,该问题亟待有效解决[9]。
5)地面三维激光扫描仪采集的点云数据精度会受到多种因素影响[10],如仪器的分辨率、仪器的测距和测角精度、外界环境等,这也直接影响了地形测绘成图的质量。因此对仪器的检校是十分重要的,但目前国内的三维激光扫描仪的检校体系还不够完善,这也需要进一步研究。
4 结论
本文采用Riegl VZ-400地面三维激光扫描仪对桔园地形进行快速测量,最终生成该地区的等高线图和DEM图。实践表明,利用地面三维激光扫描仪对该测区进行地形测绘是可取的,但该技术仍然存在一些不足,需要进一步的研究。
[1]李兵,朱继东,陈艳.采用IKONOS卫星影像进行立体测图技术的应用研究[J].地理信息世界,2006,4(6):62 -66.
[2]李欣,周佳玮,刘正国,等.三维激光扫描技术在船体外形测量中的试验性研究[J].测绘信息与工程,2006,31(6):36 -37.
[3]刘盈.浅谈地面三维激光扫描技术在市政工程测量中的应用[J].北京测绘,2008(1):61,67 -68.
[4]梅文胜,周燕芳,周俊.基于地面三维激光扫描的精细地形测绘[J].测绘通报,2010(1):53 -56.
[5]郑德华,雷伟刚.地面三维激光影像扫描测量技术[J].铁路航测,2003(2):26-28.
[6]武汉测绘科技大学《测量学》编写组.测量学[M].北京:测绘出版社,2002:41-52.
[7]高志国.地面三维激光扫描数据处理及建模研究[D].西安:长安大学,2010:36-44.
[8]SUI Lichun.Processing of Laser Scanner Data and Extraction of Structure Lines Using Methods of the Image Processing[J].测绘学报,2004,33(1):63 -70.
[9]官兰云.地面三维激光扫描数据处理中的若干问题研究[D].上海:同济大学,2008.
[10]刘春,张蕴灵,吴杭彬.地面三维激光扫描仪的检校与精度评估[J].工程勘察,2009,37(11):56 -66.