一种新型双轴太阳帆板驱动线路盒设计*
2014-05-06张兴国周世安范松涛雷海军
张兴国,周世安,范松涛,雷海军,李 庆,张 扬
(北京控制工程研究所,北京100190)
0 引言
为满足卫星在轨能源供给,大多数三轴稳定卫星采用帆板式太阳电池阵并使用太阳帆板驱动装置(SADA,solar array drive assembly)使电池阵对日定向,以便获取更多能源[1].双轴帆板驱动装置拥有2个转动自由度,且2个转动轴可以独立控制工作,解决了非太阳同步轨道卫星必须常常进行姿态机动才能使帆板跟踪太阳的不便,既保证了卫星上能源的供给,又满足了卫星对地定向三轴稳定的需求[2].
目前双轴帆板技术在国外许多航天器中广泛应用,如美国和俄罗斯的长寿命、高分辨率、大容量军事侦察卫星,Motorola公司等建立的移动通信卫星网等[3].国内某型号卫星已成功应用了双轴帆板驱动装置,随着空间技术的飞速发展,双轴帆板技术将得到更广泛应用.
双轴帆板驱动装置由驱动机构和驱动线路盒组成.驱动机构通过步进电机直接带动电池阵转动,同时实现太阳电池阵与星体内信号和能源传输.驱动线路盒用于驱动机构电机转动,控制机构实现不同转动模式.针对空间应用的高可靠性和电机转动的高稳定性要求,帆板驱动线路尤其是模拟线路部分目前还采用分立器件为主的设计,这就使得帆板驱动线路体积和重量偏大,对于双轴帆板驱动线路则问题更加突出[3].本文基于现有帆板驱动线路,提出了一种新型双轴帆板驱动线路盒(BSADE,biaxial solar array drive electronics)设计,在满足对双轴驱动机构2个电机精确控制的同时,保证了产品可靠性、安全性设计要求,并在一定程度上实现了小型化目标.
1 双轴帆板驱动线路盒功能简介
双轴太阳帆板驱动机构包括360°连续旋转轴(A轴)和有限角度旋转轴(B轴),每轴由1台独立的步进电机作为驱动源.步进电机的输出轴直接带动齿轮减速器转动,从而使电机的输出力矩经过减速器的放大作用在太阳帆板驱动机构的输出轴上.双轴太阳帆板驱动线路盒能够为步进电机绕组提供激磁电压和电流使电机转子在交变的磁场作用下顺时针或逆时针转动,并输出稳定的转矩.
双轴帆板驱动线路盒通过串行通信口接收上位机发送的控制命令,使驱动机构工作在不同的工作模式下,通过采集A轴和B轴零位位置信号进行校准,计算A、B轴电机转角,同时实时采集电机绕组电流、机构轴温和壳温等遥测信息,通过串口将这些信息发送到上位机.
线路盒由主备份2个相同系统组成,根据主备份系统的加电状态自动切换主备份线路工作,同时接收上位机发送的绕组切换指令,控制电机绕组为主份工作或者备份工作.
2 系统组成与设计
考虑工程实现和可靠性、安全性的要求,双轴太阳帆板驱动线路盒由切换线路和2套相对独立且完全相同的主备份系统组成.如图1所示,每个系统包括DC/DC模块、单片机最小系统、电机驱动线路和电机状态采集线路等组成.上位机通过切换一次供电电源实现线路盒的主备份切换功能.
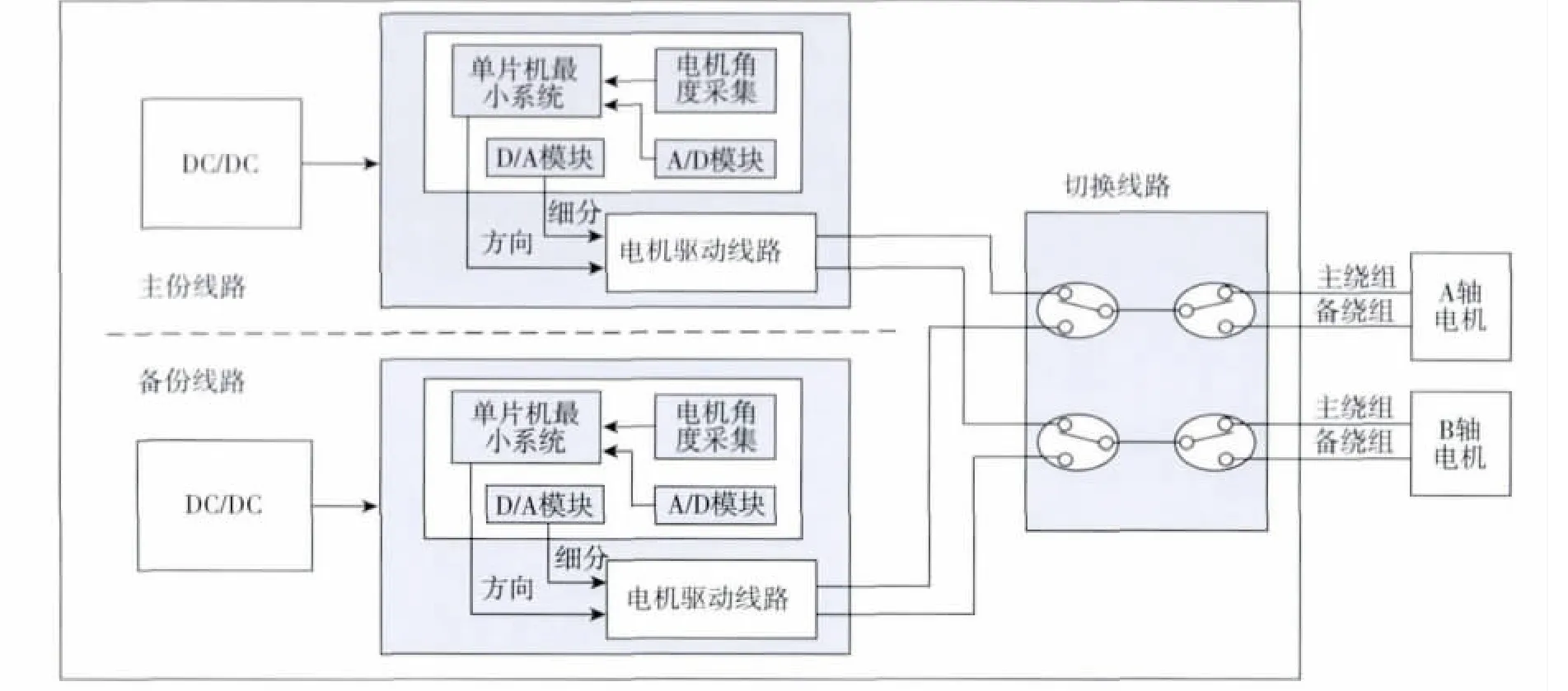
图1 双轴帆板驱动线路盒系统框图Fig.1 Description of BSADE
2.1 单片机最小系统及外围组成
单片机最小系统以80C32E为核心,采用一片8 K ROM作为程序存储器,工作频率7.372 8 MHz.通过80C32内部通信口实现与上位机的异步串行通信,接收上位机发送的工作命令,同时将采集到的帆板电机状态信号和线路本身遥测信号回送给上位机.
为提高电机的细分控制精度,细分控制信号由80C32E及外围电路D/A产生,80C32E从PROM中读取预先存好的细分数据代码,经数模转换芯片转换成相应的电压值,给定的电压越大,流过电机绕组的电流也越大.数模转换芯片采用 AD公司的AD664实现,AD664为4通道8位 DA芯片,1片AD664可驱动2个电机,即1套双轴太阳帆板驱动机构.电机的绕组电流方向信号由80C32通过位口直接输出控制.
利用比较器实现对电机零位传感器信号的采集,由电阻分压调整比较电平,保证零位信号输入具有可靠的裕度范围,80C32E采集到该零位信号作为角度计数器的0起始.
2.2 电机驱动线路设计
考虑到步进电机绕组激磁电流的恒流控制要求以及一次母线电源电压的波动,线路盒采用脉宽调制的恒流驱动线路.为保证电机运行的平稳性,A、B轴电机控制都采用细分控制.
电机驱动线路如图2所示,主要包括电流方向转换延时线路、恒流调宽线路和H桥驱动线路.恒流控制主要是对单相电流的细分跟踪,将D/A产生的细分信号和电流采集信号比较,控制H桥驱动线路的通断,利用电机线圈的储能特点,组成闭环调宽恒流系统[4].

图2 驱动线路结构图Fig.2 Structure of drive circuit
一些常用的电机驱动专用模块目前还没有确切的可靠性指标,为保证可靠性,H桥驱动线路采用分立器件设计,作为恒流闭环中的执行环节,4个桥臂的控制信号(A11、A12、A13和A14)由电流方向信号与恒流调宽信号组合逻辑产生.如图3所示,图中“PUL”是电机一相绕组的电流方向信号,高为正向电流,低为负向电流,分时控制2对桥臂,即电流方向信号为高时,A12、A13为低电平,关闭负向电流桥臂,A11、A14则根据恒流线路输出信号控制正向电流桥臂;电流方向信号为低时,A11、A14为低电平,关闭正向电流桥臂,A12、A13则根据恒流线路输出信号控制负向电流桥臂.

图3 电流方向转换延时线路Fig.3 Current direction switching delay circuit
考虑到电流方向转换瞬时可能出现的驱动线路短路情况(即 A11、A12或 A13、A14瞬时同时为高),设计了电流方向转换延时线路,选择R、C参数,保证电流方向转换延时时间常数T(R×C)大于方向信号到驱动管动作时延(一般小于10 μs),时序图如图4所示,实测波形如图5所示(Ch1通道为A12信号波形,Ch2通道为A14信号波形).

图4 信号时序图Fig.4 Signal timing diagram
帆板驱动线路在设计H桥线路时,为解决H桥驱动管在电流方向转换瞬时发生对穿产生瞬态大电流的风险,一般采用大功率管设计来承受瞬间的大电流,导致驱动线路复杂、体积偏大、重量偏高.通过上述的电流方向延时电路,能有效避免H桥驱动管出现对穿的风险,瞬态大电流得以消除.驱动线路采用了TO封装的小功率管进行设计,既达到了线路正常工作的一级降额要求,又满足了电机驱动的功能和性能要求,一定程度上实现小型化目标.
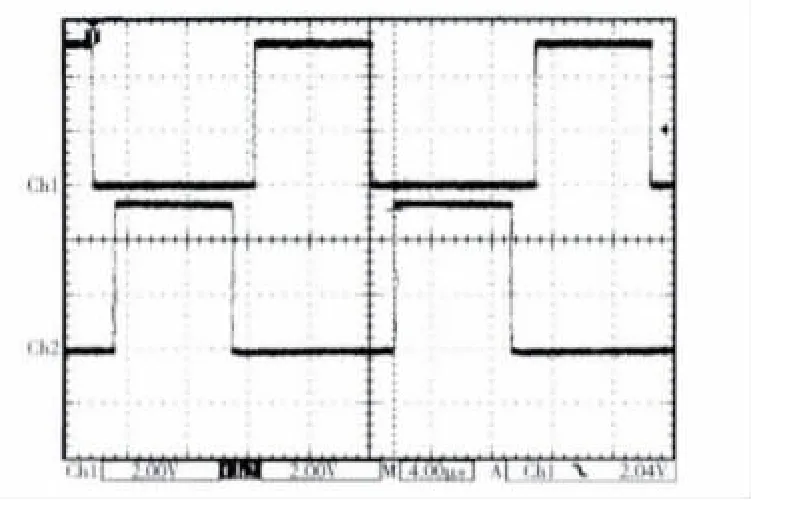
图5 实测A12和A14的时序图Fig.5 A12 and A14 timing waveform
2.3 驱动线路和电机绕组交叉重组设计
电机驱动线路和电机绕组的连接通常是固定的,即驱动线路的主备份分别接在电机绕组的主备份.原理上看,主备份线路是相互独立的;但由于主备份电机绕组是并绕模式,工作的电机绕组会通过电磁耦合施加电应力到非工作线路,从而对非通电器件产生应力冲击.另外,单份线路输出接口处的器件失效,尤其是导致绕组短路的故障,将会改变或降低另一份绕组的电感特性,导致另一份也不能正常工作,使整机性能下降甚至失效,主备份不能达到冗余设计目的.
为从根本上解决主备份线路间的影响并简化驱动线路的设计,提出了驱动线路和电机绕组交叉重组的设计方法,在保留2套相对独立的主备份驱动线路的同时,增加切换线路.如图6所示,在每路驱动输出通路上设置前后2组继电器[5-6],使驱动线路主备份和电机绕组负载主备份连接均可控制,保证非工作的驱动线路和非工作的电机绕组经继电器隔离,不受工作绕组的电流影响,解决了主备份驱动线路之间的耦合问题.根据主备份线路一次电源上电情况决定将电机绕组接在主份驱动线路或者备份驱动线路,绕组主备份切换根据上位机的命令决定使用主份电机绕组或者备份电机绕组.采用这种切换方式彻底解决了主备份线路间耦合的影响,实现严格冷备份目标,并且通过切换控制,使帆板驱动线路驱动电机绕组工作具有4种驱动模式:主份线路驱动主份电机绕组、主份线路驱动备份电机绕组、备份线路驱动主份电机绕组、备份线路驱动备份电机绕组,在任一单份驱动线路故障和任一单份电机绕组断路故障同时出现时,仍能保证电机正常工作,从而大大提高产品可靠性.

图6 驱动线路和电机绕组连接图Fig.6 Connection between drive circuit and motor coils
3 试验验证
双轴帆板驱动装置作为帆板控制部件,其电机转动的均匀性和平稳性至关重要,影响电机转动均匀性的主要因素是绕组电流波形的选定,细分控制主要影响电机转动的平衡性,细分越细,电机转动越均匀.A、B轴电机分属不同型号的感应式永磁电机,需对A、B轴电机进行线路联试,绕组控制曲线采用了每步64细分、128细分和256细分,分别在电机高速、低速下进行了试验,试验测量结果如下:A轴电机理想的绕组电流波形近似为正弦波,如图7所示(Ch1通道为给定的细分信号,Ch2通道为A电机绕组电流波形),B轴电机理想的绕组电流波形近似为梯形波,如图8所示(Ch1通道为给定的电流方向信号,Ch2通道为B电机绕组电流波形).通过联试,128细分即可满足工作需求,本设计最大可以提供1 024细分.由于绕组电流的给定曲线由软件产生,和硬件无关,可以在软件固化时针对不同种类的电机,通过修改给定曲线,方便不同种类步进电机负载使用.
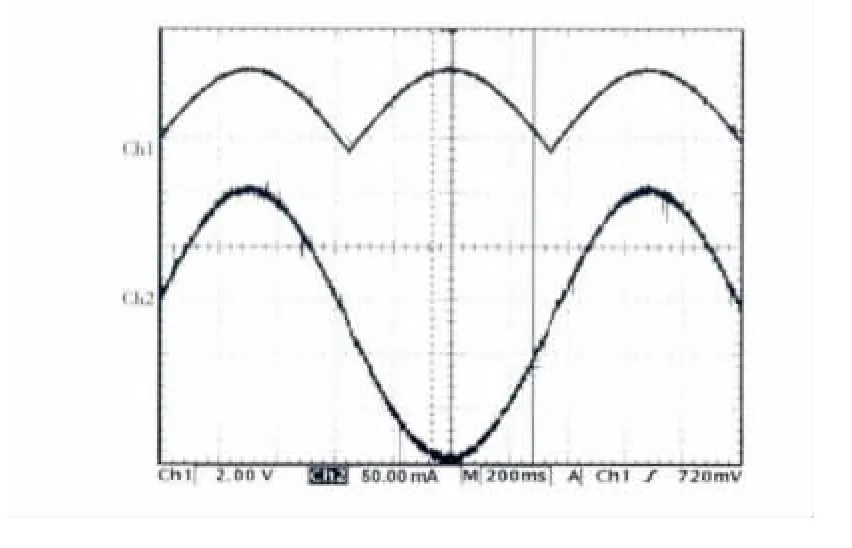
图7 A轴电机绕组电流波形Fig.7 Current waveform of A-axis motor coil

图8 B轴电机绕组电流波形Fig.8 Current waveform of B-axis motor coil
4 结论
本文在现有帆板驱动线路设计基础上,介绍了一种新型双轴帆板驱动线路设计,重点论述了电机驱动线路中的电流方向延时线路和驱动线路与电机绕组交叉重组设计,在实现双轴电机控制基础上,既有效提高产品的可靠性,又在一定程度上达到小型化设计目标.试验结果表明该线路设计正确可靠,功能性能满足任务要求.本文论述的帆板驱动线路设计方法对同类线路设计具有很好的参考价值.
[1]张猛,祝晓丽,陆娇娣,等.一种高稳定度太阳帆板驱动机构控制方法[J].空间控制技术与应用,2010,36(4):46-49.ZHANG M,ZHU X L,LU J D,et al.A high stability control method for solar array drive mechanism [J].Aerospace Control and Application,2010,36(4):46-49.
[2]高星,王友平.太阳帆板驱动机构的现状和近期发展方向[J].控制工程,2001(5/6):56-68.
[3]高星,王友平.太阳电池阵驱动机构通用化、系列化和组合化设计[J].空间科学学报,2002,22(增刊2):55-68.GAO X,WANG Y P.The universalization-,serialization-,and modularization design of solar array drive assembly(SADA)[J].Chinese Journal of Space Science,2002,22(Sup2):55-68.
[4]张瑞,常静波,刘银年.高稳定度步进电机驱动电路设计[J].计算机工程,2007,33(4):247-249.ZHANG R,CHANG J B,LIU Y N.Circuits design of high stability stepping motor drive[J].Computer Engineering,2007,33(4):247-249.
[5]王凯,李杏春,王占国.一种磁保持继电器驱动电路的设计[J].仪器仪表用户,2008,15(3):66-67.WANG K,LI X C,WANG Z G.Design of driver circuit for magnetic self-perpetuating relay[J].Electrical Instrumentation & Consumer,2008,15(3):66-67.
[6]钱金川,朱守敏.可靠性技术在继电器控制中的应用[J].低压电器,2007(7):9-11.QIAN J C,ZHU S M.Application of reliability technology for relay control[J].Low Voltage Apparatus,2007(7):9-11.
