空间操作控制技术研究现状及发展趋势*
2014-05-06何英姿魏春岭
何英姿,魏春岭,汤 亮
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
0 引言
空间操作(space operations)技术,是指在太空有人或无人参与的情况下,针对特定在轨目标进行在轨操控,实现抵近监测、辅助变轨、故障维修、加注升级、组装建造、在轨救援和碎片清理的技术.空间操作技术是航天任务高性能复杂化的必然需求,而且促进空间攻防技术、保障空间安全,具有巨大的经济效益和军事价值.
空间操作是指利用具有一体化空间感知与执行的部件和载荷,兼有智能自主控制或遥操作控制模式的多功能新型空间平台对指定空间目标建立连接、实施动作的过程.空间操作是空间技术进入新时代的标志.制导、导航与控制(GNC)系统是空间操作平台的核心分系统,是决定平台是否具备出色任务能力的关键之一,必须保证测得精、靠得近、抓得住、操作准,需要具备4个方面的能力.a)自主运行能力:可以不依赖地面,实现自主导航、自主制导律计算、自主控制和运行管理,对失效慢旋卫星或敌方目标操控具有重要意义,特别是在临近操作和测控区外操作时,对自主能力要求很高.b)目标重构识别能力:即便操作对象是己方卫星,有些也不具备辅助交会系统,甚至处于失控状态,不能提供配合,需准确掌握非合作目标对象特性、确定安全走廊和抓捕点、实施精确抓捕,要求快速高精度相对导航、特定部位识别与跟踪测量技术.c)精准敏捷能力:操作任务时效性强,需要快速自主轨道转移,临近操作中,平台与目标之间存在较复杂的相对运动,要求平台具有精准敏捷的机动控制能力,确保安全和准确.d)联合体规划控制能力:是实现抓捕操作的关键,要适应对象更换末端手抓、捕获目标,通过机械臂移动平台或目标、实施灵活操作,需要掌握复杂约束多体变构型航天器的高精度强适应控制技术.
1 空间操作控制技术发展现状与趋势
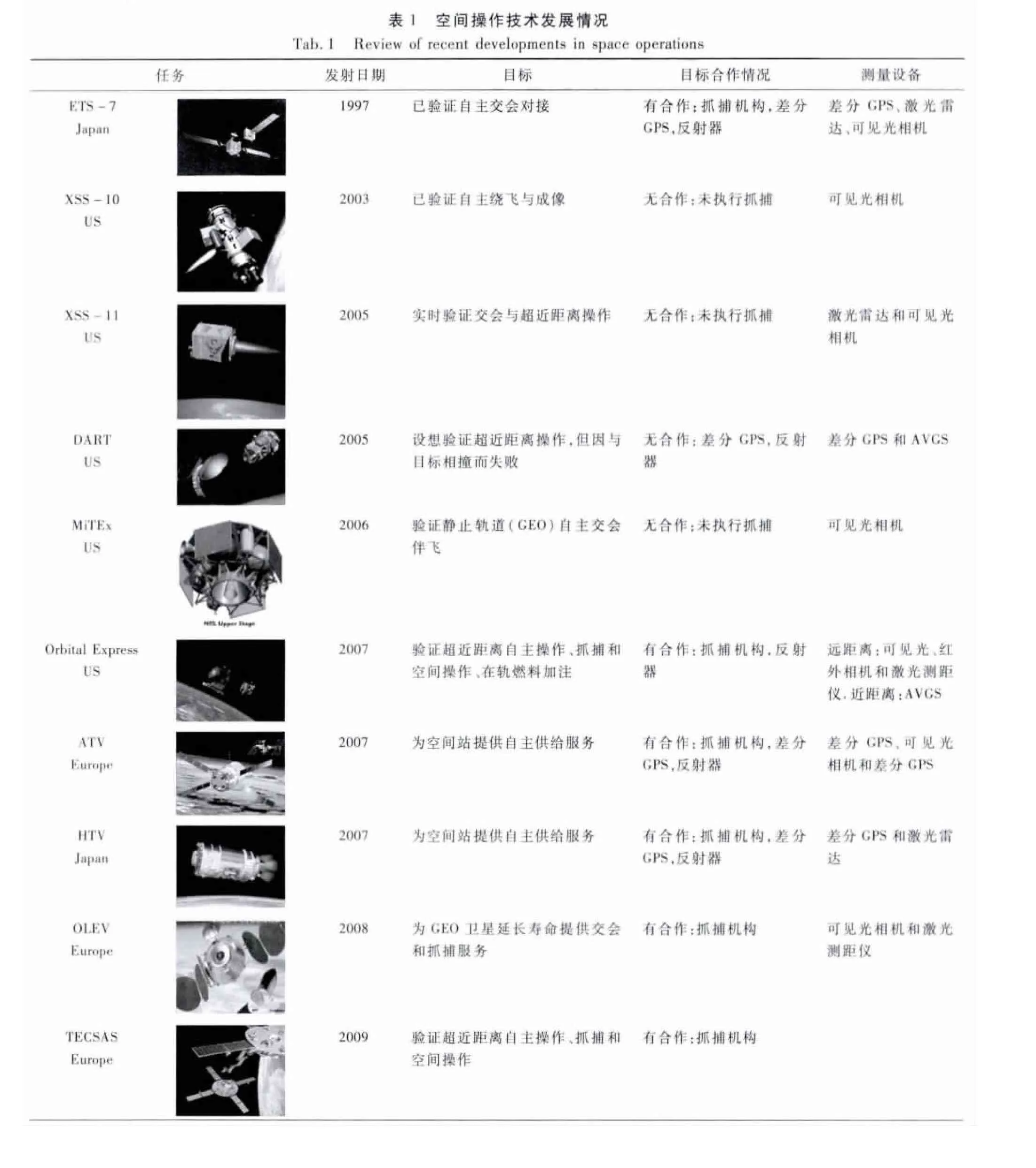
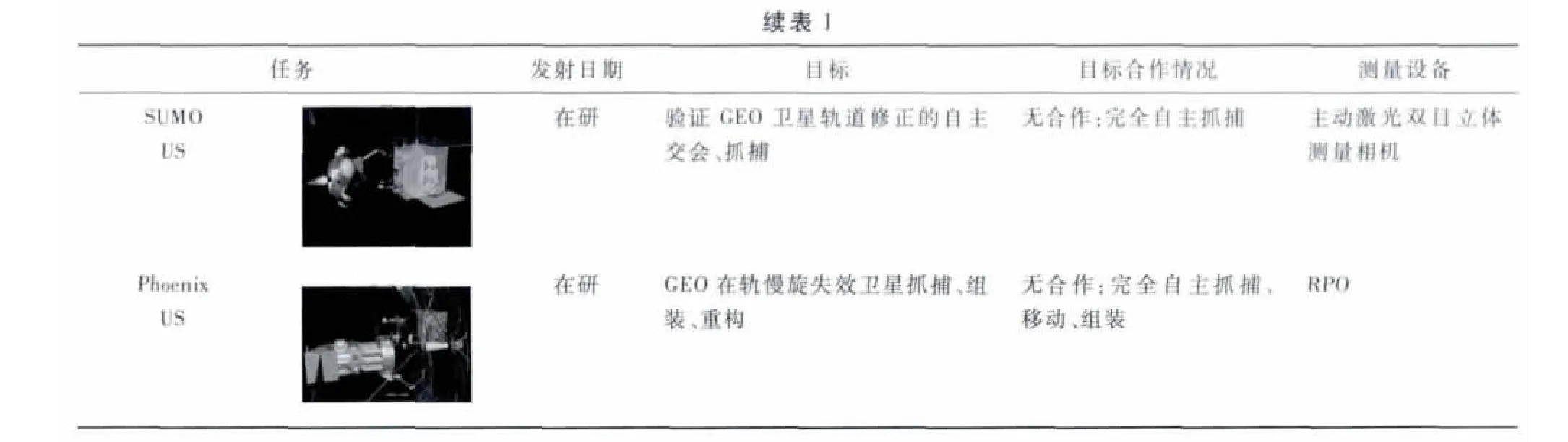
需求牵引在空间控制技术发展中起着至关重要的作用.国外由对合作目标向对非合作目标空间操作方向发展,目前处于在轨飞行试验阶段.近年来,国外尤其美国频繁进行交会对接、逼近绕飞和空间操作试验,不难看出国外对此类技术的重视程度,具体情况见表 1[1-8].
?
?
高轨卫星是重要的信息节点,不仅占据着宝贵的轨道资源而且造价高昂,通过模块更换、操作修复、加注燃料等空间操作或实施离轨操作,将带来很好的社会和经济效益;通过抓捕软杀伤或攻击硬杀伤来俘获或破坏这样一类卫星,具有极大的军事震慑力.GEO只能采用无人空间操作,对自主性、可靠性要求更高,提出非合作目标操控自主GNC技术的需求.
(1)MiTEx(静止轨道空间操作小卫星)任务[6]
MiTEx是漫游在地球静止轨道上具有大机动能力的小卫星演示验证计划,执行近距离干扰、逼近、照相、阻隔通讯、侦听、耗尽敌方燃料造成永久损坏等军事用途.MiTEx包括先进上面级、MiTEx-A和B卫星.部署在地球同步轨道上,其上面级的长寿命和推进能力使卫星能够到达地球同步轨道上的任何位置,接近目标卫星并围绕它进行操作,对目标卫星进行侦察和拍照,发现其弱点,接收目标卫星收发的无线电信号,甚至可对目标卫星实施永久性破坏.2009年1月MiTEx通过轨道机动,成功对2008年10月失效的静止轨道DSP23预警卫星进行了近距观测.由于MiTEx卫星体积很小,各国现有的地基可见光观测设备或雷达很难对其进行有效的跟踪探测,只有美国的空间监视网能够可靠地探测到这2颗卫星.该任务飞行测试了新的实验型上面级,验证了轻质量动力和推进系统,获取GEO轨道空间操作经验(如图1所示).
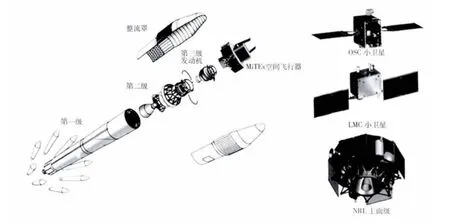
图1 MiTEx发射组件和卫星构型Fig.1 The micro-satellite technology experiment program and the satellite framework
(2)SUMO/FREND(通用轨道修正航天器)演示任务[7]
SUMO是一个典型的面向高轨非合作目标的自主交会、逼近、抓捕并实施空间操作的演示任务,重点对机器视觉、机械臂、自主控制方法等关键技术进行验证.SUMO相对导航敏感器完全是针对非合作设计的,远距离采用捕获跟踪敏感器,近距离采用机器视觉敏感器,超近距离采用双目立体测量相机进行抓捕导航测量;配有3个七自由度的机械臂以及工具箱,具备更换手抓能力,增加了针对未知接触面抓取的灵活性和稳定性.SUMO精确捕获推进舱安装环上的螺钉销孔,GNC关键技术包括:鲁棒机器视觉成像技术,机械臂避障、避奇异的时间最优轨迹规划技术,捕获期间的多体航天器协同控制技术(如图2所示).

图2 SUMO卫星和4个主要任务阶段Fig.2 The SUMO satellite and the four primary tasks
(3)Phoenix 计划[8]
Phoenix计划是面向高轨非合作目标实施抓捕操作的空间应用任务.服务星载有2个七自由度机械臂和1个蛇形机械臂.去往GEO坟墓轨道,从选定的退役卫星上拆卸大型天线,经测试后用于重构新的卫星.使用机械臂抓捕目标星,把积木星Satlet安装在目标星天线设备上(JPL研制“壁虎-粘力器”粘合垫),激活Satlet进行全面测试,测试之后,服务星抓牢固定天线设备支杆,使用工具将其从卫星上拆除.必须具备多机械臂抓握、释放、机动操作能力及局部情况感知的能力;在复杂机械臂操作期间进行工具更换的能力,使用工具从现有卫星上拆除天线设备的能力等.服务星将拖动“重构好的卫星”,带到距离退役卫星较远的适当位置,然后再次激活仍然连接在天线设备上的Satlet,对其基本功能进行测试后释放,使之自由飞行(如图3所示).
综上所述,空间操作GNC技术未来的发展方向是:具备对低、中、高全轨道非合作目标空间操作能力,特别是对静止轨道非合作目标操作是今后发展的重点;逐步提升自主运行GNC技术,实现非合作目标的自主交会、逼近和在轨操作是空间操作GNC系统的技术发展趋势.
国内在与美欧等国所掌握的空间操作自主GNC技术还有较大差距,特别是在自主运行、非合作目标相对测量与特征识别、精准敏捷控制与联合体操控等方面亟待提高.根据国家提出的“必须坚持集中力量、重点突破,走跨越发展之路;实现重点领域跨越发展,推动科技进步和创新”的方针,北京控制工程研究所在空间操作智能自主控制等方面开展了卓有成效的研究,积极储备可用于空间操作和空间安全的关键技术.
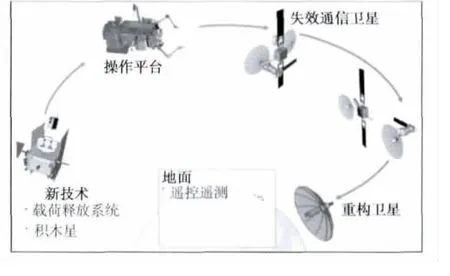
图3 Phoenix计划Fig.3 The Phoenix Project
2 自主运行
空间操作的对象大多处于非合作慢旋状态,传统的遥测遥控方式已经不能满足非合作目标空间操作任务的随机性和环境的不可预测性,要求服务航天器具备自主运行能力,包括自主导航、自主任务管理、自主健康管理等,增强GNC系统的智能、自主和可靠.
2.1 自主导航技术
快速高精度自主导航问题是实现空间操作平台自主轨道控制需要解决的关键技术问题.
对于高轨航天器而言,基于光学导航敏感器的自主天文导航精度受地心矢量测量精度的限制,其自主导航误差较大;提出利用GNSS(全球导航星系统)修正光学导航敏感器测量偏差的方法,校准了光学导航敏感器测量偏差;在此基础上,提出基于“紫外导航敏感器+IMU”的高轨航天器自主导航方式,实现GEO卫星高精度自主导航.
构建了基于紫外导航敏感器和基于双圆锥红外地球敏感器的自主导航试验系统,完成了样机在回路内的自主导航地面仿真试验验证(如图4所示).
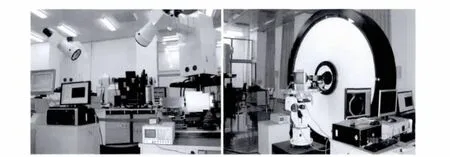
图4 基于双圆锥红外地球敏感器或紫外敏感器的自主导航试验系统Fig.4 Autonomous navigation experiments of double-cone scanning infrared earth sensor or ultraviolet earth sensor
2.2 自主任务管理技术
高机动性和高可靠性要求必须研究自主运行技术、自主规划、自主控制,目的是使服务航天器具备自主任务规划与执行能力,克服星地大回路带来的时间延迟对操作精度和稳定性的不利影响.目前航天器采用地面制定指令计划、上传执行的运管方案,尚没有完全意义上的星上自主任务管理系统出现.指令分解、标准化动作和约束设计、任务规划和资源调度算法、规划优化设计是空间操作自主任务管理需要突破的技术难点.
针对失效卫星空间操作任务,研究设计了GNC自主任务管理系统,能够基于当前实际系统状态,实时规划调度飞行器指令,给出执行机构控制器能够直接解释执行的指令序列;在固定采样点,预估未来有限时域相对运动状态,判断由闭环控制器或执行机构过载引起的状态冲突和资源冲突,进而激活规划调度模块,通过迭代执行“增加”、“删除”和“移动”3个标准化操作给出新的合理计划,新计划的制定过程和结果不影响当前执行动作的连续性;除了避免冲突发生,在滚动迭代规划调度算法之上,通过合理选取优化变量,具备规划结果优化能力.
3 目标重构识别
对于大多数空间操作的航天器,没有预先安装用于机械臂捕获的抓捕装置(如手柄),以及用于辅助测量的合作标志器和特征块,更没有发射器,是完全非合作的.其相对测量问题是一世界性的难题.由于光学相对测量的抗干扰性、无累积误差及准确性,是用于跟踪测量的首选方式.根据测量方式的不同,分为特定信息识别和模型重构两大类.
3.1 特定信息识别
第一类不是完全未知意义上的测量,其需要提前假定目标的相关特性,要么假定目标的外形尺寸已知,要么仅针对目标的某一特定部位,具有一定的局限性.但算法针对相关特性进行了专门的设计,相对简单,计算量小.算法的关键点是在序列图像中选定识别同一特征点,难点在于不同尺度、不同方位图像中特征的稳定提取,以及相机切换时特征点的平稳传递.目前,突破了非合作目标自主接近与临近操作GNC技术,研制了非合作目标相对测量系统样机,并完成了非合作目标自主逼近过程的地面物理仿真试验验证,平台实现了对超近距离非合作目标相对位置的高精度测量,并具有对无标识点慢旋非合作目标的相对测量能力(如图5所示).
3.2 模型重构
第二类是完全未知意义上的测量,针对任意航天器而言,无任何先验信息.利用视觉测量系统在多圈异面绕飞时获取未知目标高精度的完整外形模型库,在接近飞行中利用多个相机得到目标小范围的距离测量信息,并利用测量信息建立三维网格构面,然后在模型库中对三维网格构面进行匹配定位,确认最佳的位置姿态.该方法没有局限性,针对任意目标均适用,且回避了特征稳定性问题,但数据库庞大,计算复杂.其难点在于远距离绕飞时高精度模型的建立、准确的三维网格重建以及快速的三维网格匹配定位技术.

图5 双目立体测量系统Fig.5 Binocular stereo vision systems
4 精准敏捷
研究仅视线测量的远距离大范围变轨技术,突破仅能获得目标视线角情况下的轨道交会技术;根据不同任务需求,研究强迫绕飞、任意位置悬停伴飞、自主接近等相对控制技术;研究对多目标优化姿态控制技术,实现载荷对目标指向、帆板对日定向、对地数传等多目标任务要求.
4.1 大范围自主轨道控制
当距离目标较远时,相对导航测量系统仅能提供目标视线方位信息,难以输出相对距离信息,导航系统弱可观性较难获得精确导航结果.针对仅视线测量的相对导航系统,分析了视线的不同方位对系统可观性的影响,给出了判断系统是否可观的定理,提出了增大相对偏心率、合理规划机动路径增强系统可观性的方法,设计了强跟踪鲁棒UKF滤波器,实现了高精度相对导航.利用相对导航结果,采用基于动态规划和模型预测的最优多脉冲控制方法,实现了远距离轨道快速精准机动.
空间操作的目标有些是绕最大惯量主轴慢旋稳定的失控卫星,有些是载荷失效正常运行的卫星,需要在一定距离上相对目标悬停或强迫绕飞,为抓捕或操作机构对目标进行操作提供基础.强迫绕飞或悬停控制根据任务需要设计绕飞控制周期或悬停方式打破了空间摄动力下轨道自然运动模式,需要以燃料消耗最优为指标设计实时控制器.建立了相对运动动力学模型、设计了输出反馈鲁棒控制器,实现了对目标任意位置的悬停,研究了滑模变结构控制方法,提出了有限推力作用下的强迫绕飞准滑模变结构控制方法,解决了对目标的强迫绕飞控制问题.
4.2 精准敏捷姿态控制
空间操作平台是刚-柔-液耦合的多体变构型复杂控制对象,要求具有绕平台任意轴大角度快速机动并快速稳定精准指向,以及大干扰力矩补偿控制能力;对于同一系统,“稳、快、准”相互制约,解决这些矛盾是GNC系统的挑战之一.
突破了基于小型控制力矩陀螺群(mini-SCMGs)绕平台任意轴精准敏捷姿态控制技术.设计了偏差鲁棒伪逆操纵律,具有实时优化构型、远离操纵奇异、避免计算溢出和框架锁死的能力,消除操纵奇异对机动快速性和稳定性带来的严重影响.提出了路径规划和多目标参数优化方法,降低了挠性振动的影响.提出了绕平台任意轴姿态快速机动非线性控制方法,保证卫星绕最短路径按规划的最大机动角速率快速机动与稳定.研制了mini-SCMG样机,构建了物理仿真试验系统,验证了控制设计使中型空间操作平台绕平台任意轴姿态机动并快速稳定(如图6所示).
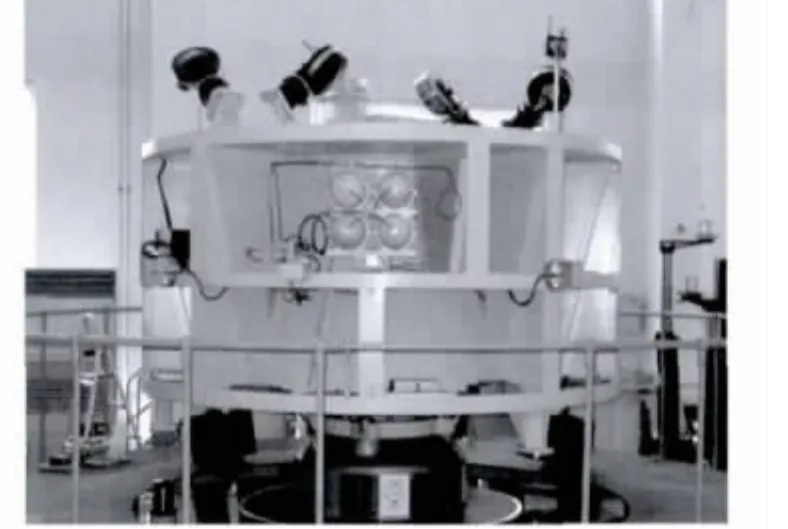
图6 绕平台任意轴精准敏捷姿态控制三轴气浮台物理仿真试验Fig.6 An agile-maneuver attitude control experiment of three-axis air-bearing table with mini-SCMGs
5 联合体规划控制
具有多机械臂的空间操作平台是安全、可靠、灵活地实施空间非合作目标在轨操作的最佳实现方案.安全需要精确的控制,可靠需要稳固的连接,灵活需要协同的多臂.针对非合作目标未知的接触面,设计“万能”工具箱,利用多臂更换手抓、改变臂展,降低几何约束、确保实现空间操作(如图 7 所示[9-10]).
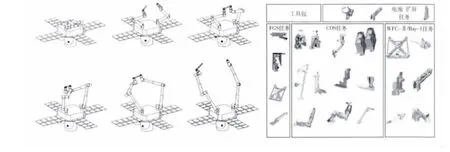
图7 适于空间多任务操控的多臂灵活变构型设计图和“万能”工具箱示例Fig.7 A reconfigurable space robot and an almighty toolbox
5.1 复杂约束多柔体变构型动力学建模
复杂约束多柔体变构型系统动力学建模和运动特性的掌握是精准控制的基础.由于空间操作平台操作连接的复杂性和操作任务的多样性,其系统动力学行为十分复杂,体现在复杂的多体运动耦合关系、大范围多体运动带来的强非线性以及开链多体、单闭链多体、多闭链多体等构型改变带来的复杂约束关系等诸多方面.
针对控制设计的需要和存在运动约束关系的闭链系统待定乘子的消除和方程的降维问题,提出复杂约束多柔体变构型航天器无冗余变量耦合型动力学模型,将系统所有运动变量用独立变量描述,在系统构成闭链后,动力学方程由开链系统模型经过非独立变量空间向独立变量空间投影,使闭链系统动力学模型得到降维.
针对仿真计算高效率和模型开放通用的问题,确定了使用递推算法建立仿真模型的方案,提出了树形多柔体系统递推算法、带有闭链约束的多柔体系统递推算法,得到了能够描述任意构型多柔体系统动力学的递推算法.
5.2多臂协调运动轨迹规划
空间操作平台在对目标的捕获或回收等操作过程中,控制目标是机械臂末端作用器或非合作目标上参考点和参考矢量的位置和姿态指向,而联合体模型中的变量则为操控平台的位置、姿态,以及机械臂各关节的转角.轨迹规划就是以期望的末端作用器或参考点和参考矢量的位置和姿态指向为目标,设计算法确定出系统中所有变量的理想轨迹,作为跟踪控制的期望输入.
提出将空间多臂轨迹规划分解为固定基座机械臂轨迹规划和目标相对运动补偿与修正的方案.提出了相对运动实时补偿算法;利用冗余自由度,设计空转指令使机械臂构型远离奇异;提出了基于机械臂构型空间的无碰撞轨迹规划算法,包括碰撞检测算法、无碰撞的目标构型求解算法,无碰撞路径搜索算法和路径优化算法,提高机械臂对操作环境的适应能力,多臂之间的协调能力,平滑轨迹和精确调整能力,确保非合作目标空间操作多臂抓捕的安全、可靠和准确.
5.3 非合作目标质量特性辨识和联合体强适应控制
操控平台在对目标的捕获/回收过程中,在保持平台姿态稳定控制的条件下,各机械臂的末端位姿控制需要达到很高的精度,以确保操作任务的完成.而对于这样的复杂约束多体系统,模型相比实际系统存在较大的误差和未建模因素;捕获非合作目标后需对目标的质量特性进行辨识,控制器设计必须具有较强的对未知干扰和参数不确定性的自适应能力.复杂连接联合体多体协调运动控制技术是精确操控的重要研究内容.
基于测量的角速度、角加速度和激励设计,提出递推最小二乘的非合作目标质量特性参数辨识方法.针对复杂连接联合体的姿态稳定控制以及机械臂的轨迹跟踪控制,提出了不依赖系统精确模型和对外干扰具有鲁棒性的退步简单自适应控制方法,实现了联合体的高精度控制.复杂约束多体变构型航天器动力学与控制的地面试验验证,由于需要多体的重力卸载,难度很大,然而这类航天器的设计和研制又特别需要三维空间的仿真验证,构建了设计和仿真平台,实现了在轨操控全过程的数字化仿真(如图8所示).
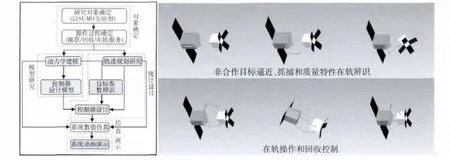
图8 目标捕获与联合体控制设计和仿真平台Fig.8 A design and simulation software of space operations
6 结论
空间操作自主GNC技术在近十年里有了长足的发展,不进则退,必须加快卫星空间操作自主GNC技术的研究步伐,以空间操作对未来航天器研制和运行影响的研究为牵引,深入开展空间操作自主GNC技术的需求和任务规划,在需求研究上取得突破.空间操作自主GNC技术是空间技术新兴领域,处于蓬勃发展阶段,以新概念、新原理和新方法研究为主要标志,积极开展该领域发展论证和方向梳理,在体系发展研究上取得突破.空间操作的主体是航天器及其系统,集智攻关自主GNC核心技术,成熟一批应用一批,发挥推动技术进步中实践的重要作用,在科技装备上取得跨越式突破!
[1]ANDREW M L,MATTHEW G R,DANIEL E H.Onorbit servicing:a new value proposition for satellite design and operation[J].Journal of Spacecraft and Rockets,2007,44(4):964-976.
[2]HYEONGJUN K,HIROSHI Y,Research on optimal number of joints and lengths of multi-jointed robot arm[R].AIAA 2012-5712,2012.
[3]DENNIS R W.Orbital recovery's responsive commercial space tug for life extension missions[R].AIAA 2004-6118,2004.
[4]AARON P,MATTHEW F,NICHOLAS W.Gravity independent climbing robot:technology demonstration and mission scenario development[R].AIAA-2013-5409,2013.
[5]PINSON R M ,HOWARD R T,HEATON A F.Orbital express advanced video guidance sensor:ground testing,flight results and comparisons[R].AIAA 2008-7318,2008.
[6]OSBORN M ,CLAUSS C.Micro-satellite technology experiment(MiTEx)upper stage propulsion system development[R].AIAA 2007-5434,2007.
[7]OBERMARK J,CREAM G,KELM B E.,SUMO/FREND:vision system for autonomous satellite grapple[C]//Proceedings of SPIE,2007,1-11.
[8]BROOK S,DAVID B.DARPA Phoenix payload orbital delivery(POD)system:“FedEx to GEO”[R].AIAA 2013-5484,2013.
[9]LYN C,ENG P,MOONEY G.Computer vision systems for robotic servicing of the Hubble space telescope[R].AIAA 2007-6259,2007.
[10]FARHAD A.A reconfigurable robot with telescopic links for in-space servicing[R].AIAA 2010-8021,2010.
