圆环提升机安全装置的研究
2014-04-28王迅
王 迅
(苏州大学,江苏 苏州 215000)
圆环提升机安全装置的研究
王 迅
(苏州大学,江苏 苏州 215000)
本文以圆环提升机的安全装置为研究对象,分析了圆环提升机安全装置的工作原理,对提拉机构进行了运动分析,最后利用Adams软件对安全装置进行了动力学仿真,得到了满意的仿真结果。
提升机;安全装置;安全钳;可靠性;仿真
0 引言
圆环提升机作为一种垂直运输升降设备,主要承担着垂直运输人员及物料的工作。安全钳、限速器及安全钳提拉机构是圆环提升机安全装置的重要组成部分,电梯发生故障时,通过安全装置的制动功能保障提升机中人员的生命安全。本文对圆环提升机安全装置的工作原理进行了介绍,对提拉机构进行了运动分析,并结合Adams软件对其进行了动力学仿真。
1 安全装置的工作原理
为了保证圆环提升机运行的安全性,设备的运行系统中设置了安全保护装置以及限速器,限速器和安全保护装置是联动机构。提升机在运行时,圆环形的轿厢沿着塔身中的导轨槽上运行,当提升机发生故障时,轿厢下降速度过快,在达到限速器的额定限制速度时,限速器会立即动作,限速器与安全保护装置会将轿厢两侧的制动楔形块提起,使得轿厢制动。此时安全保护装置上的电器开关触点被触发,电气联锁开关发生动作,轿厢曳引机停止运转。通过这两种方式的保护,使得提升机在发生故障时的安全性得到保障。
图1为圆环提升机的安全提拉机构,它是由左右两侧拉条、转轴、底板和弹簧以及相应的支撑部件和连接部件组成,本文研究的安全按提拉机构的的工作原理为:当限速器动作后,限速器连接头向上提拉,通过带动环形转轴使得两侧连杆顺序动作,进而同时提起左右两侧的楔形块,使得电梯轿厢可靠制动。可以看出,安全钳提拉机构的结构形式主要由安全钳的结构类型和轿架的结构共同决定的。
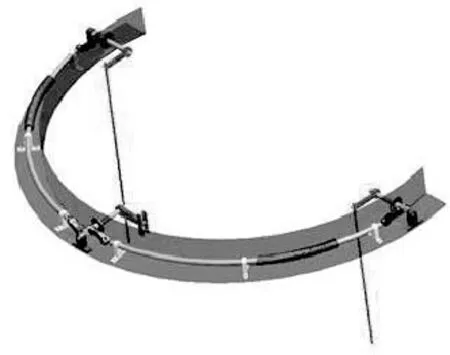
图1 圆环式安全钳连杆提拉机构
2 提拉机构的运动分析
环形提拉机构的部分结构力学模型可简化成曲柄滑块机构,如图2所示。曲柄AB的长度为γ2=50mm,AB的角位移为θ2,AB的旋转角速度为w2,旋转角加速度为a2,连杆BC的长度为γ3=125mm,旋转角位移为θ3,旋转角速度为w3。
曲柄滑块机构是一种应用比较普遍的机构模型,它能将曲柄的转动转换为从动件的直线运动;根据曲柄的运动角速度等参数,可以求出机构中某些点的位移,速度和加速度。
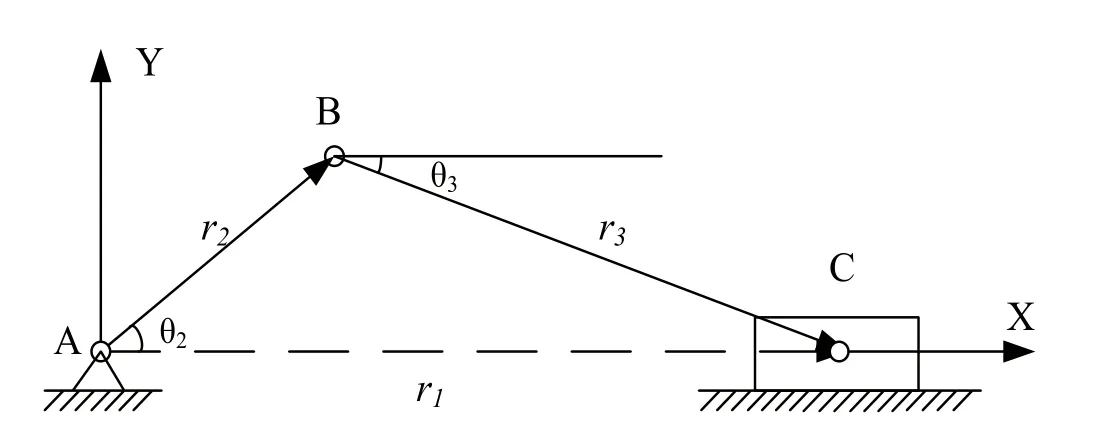
图2 提拉机构运动简图
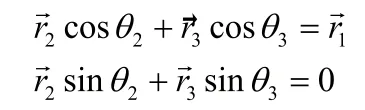
根据上面的曲柄滑块运动简图,图中取A点为坐标原点,则构件AB、BC与AC之间的向量关系为:

将上面的构件之间的位移向量关系分别分解到x和y轴方向上,得出以下公式:
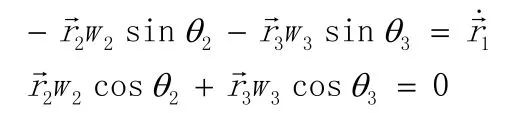
将上述的位移方程对时间t求导,得到曲柄滑块的速度方程:
将上面的速度方程写成矩阵的形式得:
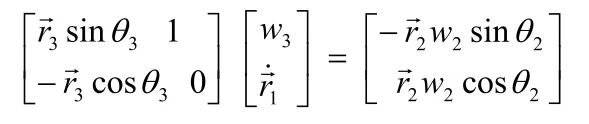
将上述的速度方程对时间t求导得:

将其写成矩阵的形式得到下式:

这就是曲柄滑块的加速度方程。根据上述计算公式,就能根据曲柄的旋转角速度w2,就可求出B点位移和滑块的运行距离等参数。
3 安全装置的动力学分析
安全钳的制动距离、制动力和制动时间这几个参数是瞬时式安全钳性能好坏评价的主要指标,本文利用Adams软件瞬时安全钳进行动力学仿真试验分析。
3.1 仿真模型的建立
将在SolidWorks中建立完成的安全装置模型导入到ADAMS中,定义好基本参数后,根据安全装置实际所受约束情况分别对其施加固定、滑动和接触约束。在安全装置的建模过程中,对安全制动装置的结构进行了必要的简化,以防止导入ADAMS中模型失真的情况的发生。安全装置的仿真模型如图3所示。
3.2 载荷与约束的添加
导入ADAMS的模型,各个零件间的连接关系需要重新定义,因此给模型添加约束是模型运动和决定仿真能否输出结果的关键。在对安全装置进行动力学仿真之前,需要对模型的刚度、摩擦力参数以及接触力指数和阻尼大小进行确定,导轨与楔块的间的约束为接触副约束,它们之间的动摩擦系数为0.3,静摩擦系数定为0.4,楔块与钳体之间的约束同样为接触副约束,两者之间的静摩擦系数为0.03,动摩擦系数为0.02。导轨与地面间的约束为接触副约束,圆环轿厢与地面间为移动副约束,对各实体间的约束形式以及摩擦系数定义之后即可进行模型的动力学仿真。

图3 安全装置在ADAMS中的仿真模型
3.3 仿真结果
如图4所示为轿厢位移曲线,图5为轿厢速度曲线。
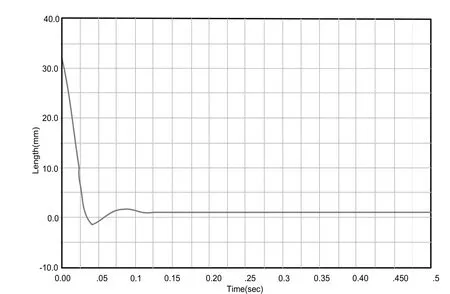
图4 轿厢位移曲线
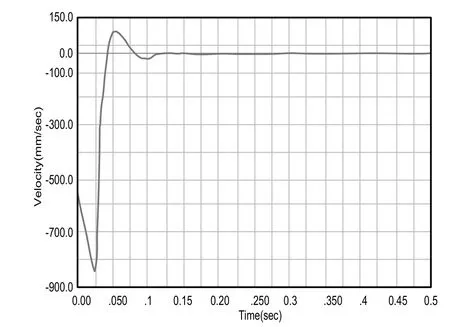
图5 轿厢速度曲线
可以看出,升降机圆环轿厢在安全钳的制动过程一般分为3个阶段。阶段l:升降机钢丝绳断裂后圆环轿厢就成自由落体,当轿厢速度已经达到1.0 m/s左右,限速器绳才提拉起安全钳动楔块和导轨接触;阶段2:安全钳的动楔块与导轨接触,将轿厢制停于导轨上;阶段3:安全装置制动过程结束,安全钳将轿厢完全制停在导轨上。
轿厢刚开始(t=0)以额定速度500 mm/s做自由落体运动,当t = 0.025 s 时,后来轿厢由于限速器提拉制动作用开始做减速运动,当安全钳动楔块与导轨接触时,轿厢速度已经加速到0.9 m/s左右;从图中还可以看出曲线在很短的一段时间内有振荡的现象,主要是因动楔块与导轨两实体在制动过程中会产生一定的冲击作用。
如图6所示是安全钳制动力曲线。
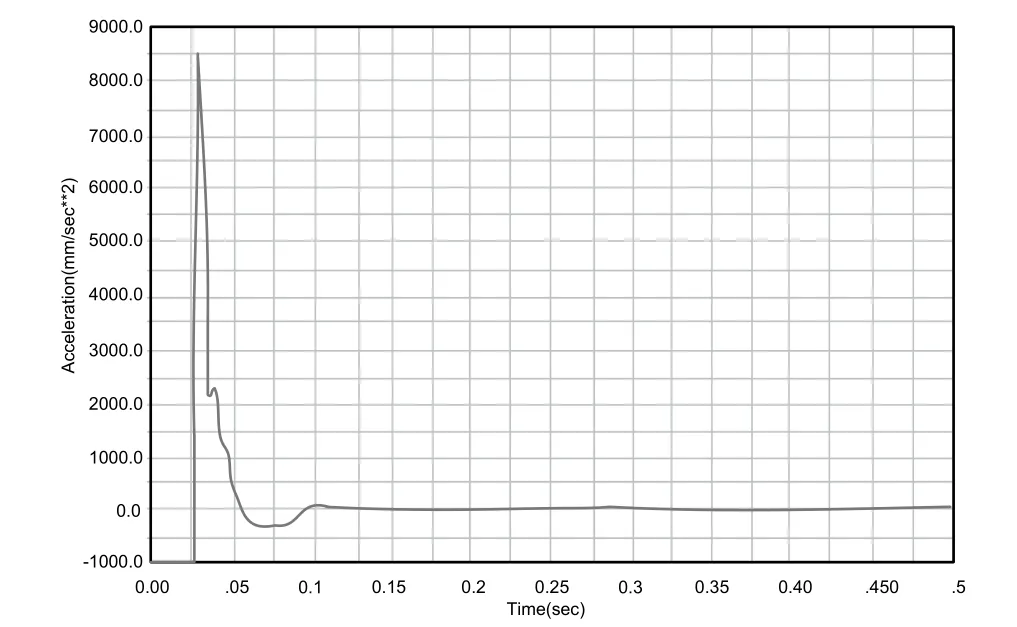
图6 轿厢制动力曲线
可以看出,安全钳制停过程中的制停力也分3个阶段。升降机曳引系统绳索断裂,圆环轿厢做自由落体达到限速器额定速度的115%时动作,这时限速器绳头提起安全钳动楔块,但动楔块还未和导轨接触,此时安全钳不受制动力;瞬时式安全钳的动楔块被提拉与导轨接触,轿厢被制停在导轨上;图中的脉冲主要有两个,首先是限速器提拉安全钳楔形块后,与导轨产生接触,此时轿厢与安全钳的冲击载荷产生第一个脉冲,碰撞之后轿厢反弹回落后与安全钳再次碰撞产生第二个脉冲;圆环轿厢停止不动,整个制动过程结束,此时安全钳受力变为恒值。
[1]于治福,商德勇.最小二乘法在提升机安全测试中的应用[J].煤矿机械,2007(03):151-152.
[2]杨桂娟.煤矿液压提升机的安全功能及其安全隐患探讨[J].煤矿机械,2013(06):209-211.
[3]殷平武.建筑施工物料提升机安全管理对策[J].经济研究导刊,2011(12):207-208.
[4]杨岱平.煤矿提升机安全运行状况探讨[J].煤炭技术,2008(07):164.
王迅(1985—),女,江苏苏州人,讲师,主要从事机械设计及机械电子方面的研究工作。
