非线性结点探测器的关节设计与分析
2014-04-10乐爱兵颜巧燕
乐爱兵,颜巧燕
(公安部第一研究所,北京100048)
0 引言
近年来,利用爆炸进行恐怖活动已成为当今世界一种新的犯罪手段。爆炸物安放的位置较隐蔽,而且大部分由电子设备和电子定时器进行控制。非线性结点探测器作为电子引爆装置的探测工具,在安检排爆领域取得越来越广泛的应用。
非线性结点探测器是应用半导体PN结非线性原理,探测射频信号的谐波,探测和定位非线性结点是否存在的仪器[1-2]。目前世界上广泛使用的非线性结点探测器主要集中在美国、俄罗斯和英国等国家。其中俄罗斯的NR系列和英国SuperBroom等产品的控制单元和天线单元彼此分离,工作人员需要将控制单元挎在肩上或背在背上,手拿天线单元对物体进行探测。这直接导致工作人员携带与操作不便,探测高度有限,无法检测处于较高位置的可疑物品,工作空间较小。
针对上述缺点,设计一种便捷式非线性结点探测器,最大手持探测高度达到3m,能使天线单元近距离检测位于墙脚、侧墙和天花板等各种角度位置的可疑区域。
1 关节设计
非线性结点探测器如图1所示。为方便工作人员携带和进行探测操作,结点探测器采用伸缩杆将控制单元、显示单元和天线单元连接成一个整体,使结构简洁和紧凑,符合人体工程学要求。同时借助于伸缩杆的伸缩功能,又能提高产品的探测范围。

图1 非线性结点探测器
结点探测器设计4个关节,分别为1个移动关节、2个俯仰关节和1个回转关节,如图2所示。俯仰关节1的作用是控制探测器主体的姿态,通过波浪压簧和钢珠的作用实现关节的转动和限位,俯仰角度范围为0~180°。移动关节的作用是提高探测器的探测高度,它是依靠伸缩杆来实现,为满足最大手持探测高度达到3m的要求,选用Velbon品牌的L40单脚架,它具有无级伸长缩短和自锁定位功能,伸缩范围为480~1 580mm。俯仰关节2和回转关节的作用是调整天线单元的姿态,使天线单元近距离地探测处于工作空间内任何角度的可疑物体,以提高探测信号的强度,俯仰角度范围为0~60°,回转角度范围为-90~90°。

图2 关节设计
2 正运动学分析
结点探测器具有控制单元俯仰、伸缩杆移动、天线单元俯仰和旋转等4个自由度。利用D-H建模方法[3]对结点探测器进行建模,建立正运动学方程。
为了确定结点探测器各连杆之间相对运动关系,在各连杆上分别固定连接一个坐标系。连杆坐标系的建立原则,即连杆i-1的坐标系{i-1}的Z轴Zi-1与关节轴i-1共线,指向任意;坐标系{i-1}的X轴Xi-1与连杆i和连杆i-1的公垂线重合,指向由关节i-1到关节i;当ai-1=0时,取Xi-1=±Zi×Zi-1,坐标系{i-1}的Y 轴Yi-1按右手法则规定,即Yi-1=Zi-1×Xi-1,坐标系{i-1}的原点Oi-1取在 Xi-1和Zi-1的交点上;当Zi与Zi-1相交时,原点取在两轴交点上,当Zi-1与Zi平行时,原点取在使di=0的地方。根据上述理论,建立结点探测器的D-H坐标系,如图3所示。
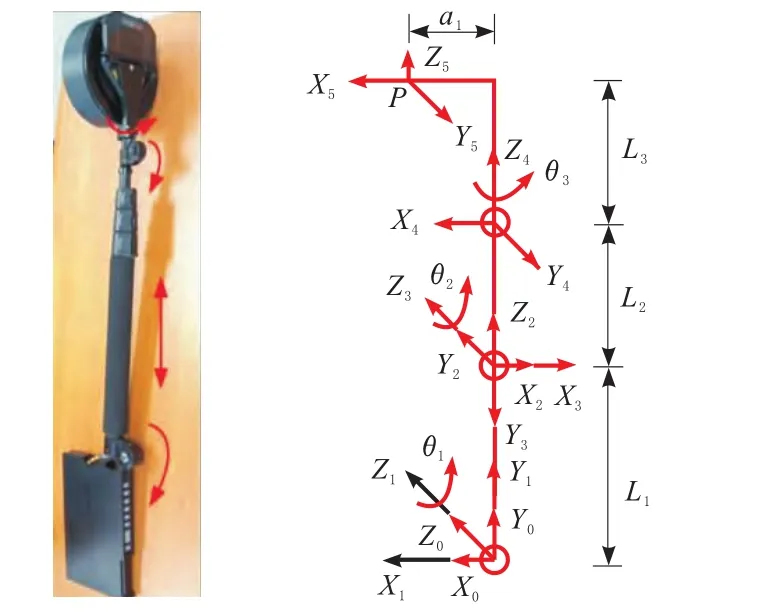
图3 结点探测器的运动学坐标系
根据建立的连杆坐标系,可得到连杆坐标参数,如表1所示。

表1 结点探测器的D-H参数
为求解运动学方程式,用齐次变换矩阵i-1iT来描述第i坐标系相对于第(i-1)坐标系的相对位置关系,即

为了书写方便,上述符号 Sθi=sinθi,Cθi=cosθi,Sαi=sinαi,Cαi=cosαi,i=1,2,3,4,5。将表1中各连杆的D-H参数代入式(1),即可得到坐标系间的变换矩阵为:

将各连杆变换矩阵相乘,就得到了末端执行器坐标系相对于基础坐标系的齐次变换矩阵05T,该矩阵描述了末端执行器在基础坐标系中的位置和姿态,即

由于结点探测器末端点相对坐标系5的坐标值为(0,0,0)T,设点P相对于基准坐标系0的坐标为(Px,Py,Pz)T,则其满足:

计算可得末端点P在基准坐标系0中的位置,即正运动学方程,结果为:


3 工作空间分析
采用蒙特卡洛方法对结点探测器工作空间进行分析。蒙特卡洛方法[4]是一种借助于随机抽样来解决数学问题的数值方法,广泛应用于描述某些随机的物理现象。结点探测器的各关节是在其相应取值范围内工作的,当所有关节在取值范围内随机取值后,末端点的所有随机值的集合就构成了探测器的工作空间。因此,可取结点探测器各关节变量的随机值,并将其代入正运动学方程,由此得到末端点基于基准坐标系0的三维坐标值。最后,将这些三维坐标点输出到图形设备上,得到结点探测器工作空间的仿真图形。具体步骤如下:
a.在Matlab环境下,利用Rand()函数产生的随机数形成各关节变量的随机值,即

θmini为关节i变化范围的最小值;θmaxi为关节i变化范围的最大值。
b.编制算法程序,使式(10)循环N 次,则得到每个关节变量的N个随机值,再将得到的随机值代入正运动学方程,得到结点探测器末端点在基准坐标系0中的N个随机位姿。
c.调用画图命令,绘制工作空间仿真图形。
根据上述步骤,获得结点探测器末端点基于基准坐标系0的工作空间和其主截面,分别如图4~图5所示。从仿真结果可以看出,工作空间内部点密集且分布均匀,无空腔,总体呈半椭圆柱状。结合工作空间仿真结果和正运动方程可知,结点探测器末端点基于基准坐标系0的坐标范围,分别为X方向范围[-1 698,54],Y 方向范围[-1 698,54],Z方向范围[-54,54],单位为mm。因此,结点探测器的工作空间大,无探测盲区,比较理想,最大手持探测高度超过3m,证明各关节设计比较合理。

图4 结点探测器的工作空间
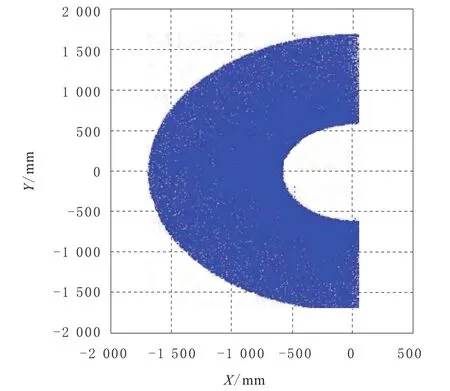
图5 工作空间的主截面
4 样机试验
非线性结点探测器样机加工和组装好后,对各关节的性能进行试验。测试显示,它的工作空间大,工作人员通过调整各关节位置,能够让天线单元近距离检测位于墙脚、侧墙和天花板等各种角度位置的可疑区域,最大手持探测高度超过3m。工作人员只需要使用双手就能完成整个探测过程,操作简单。样机完全收缩和折叠后,长度只有400mm,携带方便。
5 结束语
设计了一种便捷式四自由度的非线性结点探测器,具有控制单元俯仰、伸缩杆移动、天线单元俯仰和旋转4个关节。采用D-H建模方法和蒙特卡洛方法分别对正运动学和工作空间进行分析。仿真和样机试验结果显示,结点探测器各关节设计比较合理,工作空间大。若工作空间仿真结果或样机试验结果不符合产品的工作空间设计要求,都需要重新改进关节设计方案,直到满足为止。
[1] Barsumian B R,Jones T H.Pulse transmitting nonlinear junction detector[P].USA:6163259,2000.
[2] 魏 勇.谐波雷达探测半导体目标研究[D].北京:北京理工大学,2006.
[3] 蔡自兴.机器人学[M].北京:清华大学出版社,2000.
[4] 崔玉洁,张祖立,范 磊.基于蒙特卡洛方法的采摘机械手工作空间分析[J].农机化研究,2007,(12):62-63,94.
